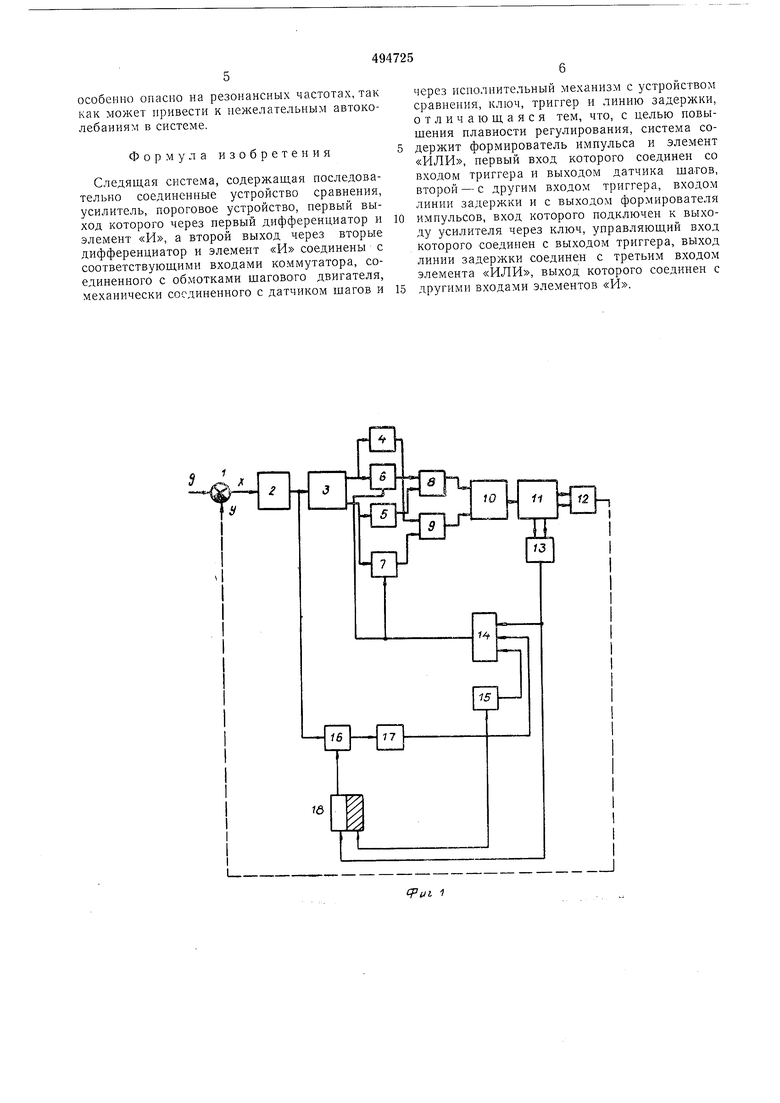
дуктор (в общем случае) связан с исполнительнььм механизмом 12, включающим в себя датчик регулируемой величины (главная обратная связь на чертеже иоказана пунктиром). На валу ШД 11 установлен импульсный датчик шагов 13. Вторые входы элементов «И 6 и 7 подключены к выходу элемента «ИЛИ 14, один вход которого соединен с выходом датчика шагов 13, второй - с выходом линии задержки 15, а третий - с входом этой линии задержки, к которому через ключ
16и формирователь импульса 17 подключен выход усилителя 2 и один из входов триггера 18, второй вход которого соединен с первым входом элемента «ИЛИ 14.
Формирователь импульса 17 представляет собой мультивибратор с регулируемой временной задержкой на выдачу импульса, регулируемой сигналом рассогласования, который подается на вход формирователя 17 через ключ 16. Период замыкания ключа 16 задается триггером 18.
Устройство работает следующим образом.
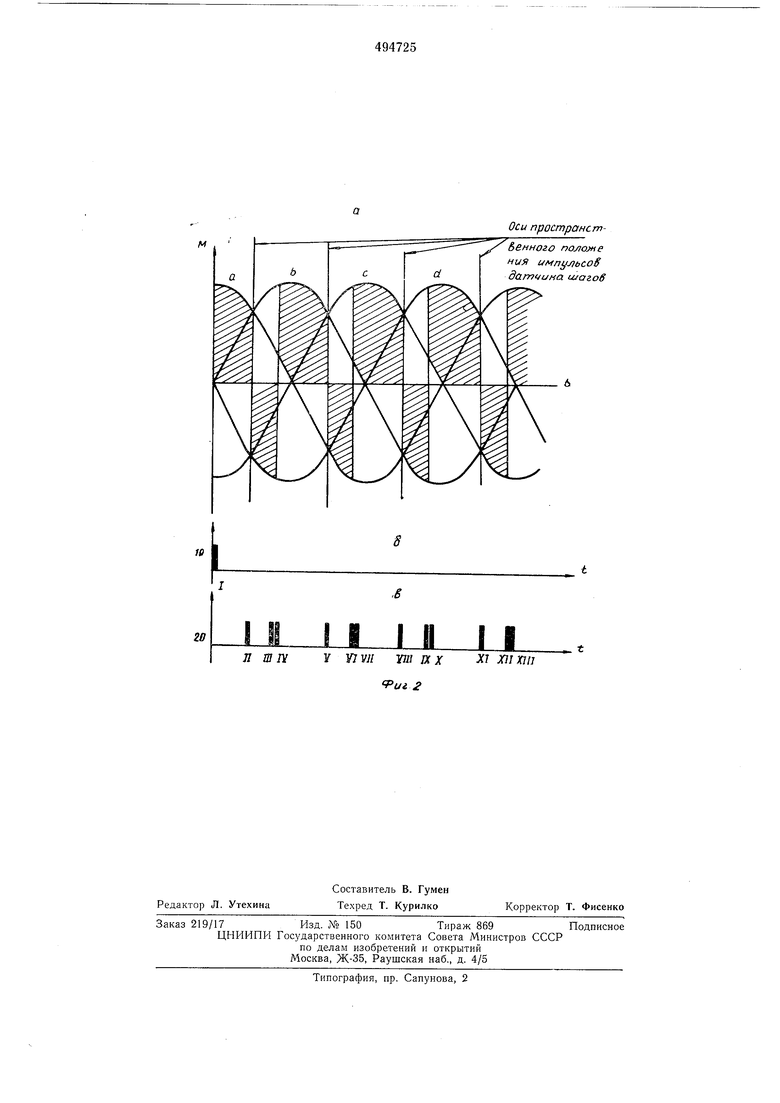
При сигнале рассогласования, превышающем значение зоны нечувствительности порогового устройства 3 на одном из выходов носледнего в зависимости от знака рассогласования появляется потенпиал, который подается на соответствующий элемент «И 6 (или 7) и дифференцирующую цепь «5 (или 4). В итого через элемент «ИЛИ 8 (или 9) на вход «вперед 19 (или «назад 20) коммутатора 10 ноступает импульс (например, импульс 1), как показано на фиг. 2 при работе двигателя «вперед, обмотки двигателя 11 переключаются, ротор попадает в ускоряющее поле (характеристика синхронизирующего момента а на фиг. 2) и начинает двигаться к новой точке устойчивого равновесия. В момент времени, соответствующий отработке ротором ШД половины шага, датчик шагов 13 вырабатывает импульс, который через элементы 14, 7 и 9, или 14, 6 и 8 поступает на переключение обмоток статора ШД в положение, соответствующее торможению ротора (фиг. 2 импульс П и характеристика d. Одновременно импульс с датчика шагов 13 поступает на один из входов триггера 18, который срабатывает и устанавливается в положение, соответствующее включенному состоянию ключа 16. Сигнал рассогласования х подается на вход формирователя 17. Через время, определяемое величиной сигнала рассогласования, на выходе формирователя 17 появляется импульс. Временная задержка импульса с формирователя
17определяет длительность торможения ротора ШД. Время торможения ротора обратно пропорционально величине рассогласования.
Импульс с выхода формирователя 17 поступает на второй вход триггера 18, перебрасывает его, и ключ 16 размыкается. Тем самым на одном шаге двигателя обеспечивается выдача только одного импульса с формирователя 17. Одновременно с этим сигнал с формирователя 17 приходит как непосредственно,
так и через линию задержки 15 на элемент «ИЛИ 14. Длительность задержки линии 15 выбрана на много меньшей минимального периода рабочей частоты двигателя. Таким образом, на коммутатор поступают два импульса, следующие один за другим, что сдвигает угловую характеристику синхронизирующего момента на два такта (фиг. 2 импульсы П1, IV и кривая в). В итоге ротор попадает в ускоряющее поле, благодаря чему отрабатывается до конца первый шаг, и начинается отработка второго шага. В момент отработки половины второго шага очередной импульс, возникающий на датчике 13, формирует серию из трех импульсов (фиг. 2 импульсы V, VI и VII), обеспечивающих торможение ротора и дальнейший его разгон. Иа последующих шагах система работает аналогично.
Время подтормаживания на шаге определяется величиной рассогласования. Если задающее воздействие изменяется с постоянной скоростью, то система, имея главную отрицательную обратную связь, производит отработку входного воздействия с той же установившейся скоростью. При уменьшении скорости входного сигнала время торможения увеличивается, и скорость двигателя снижается. При увеличении скорости входного сигнала рассогласование увеличивается и время торможения соответственно уменьшается.
При значительных рассогласованиях время торможения двигателя уменьшается практически до нуля и двигатель переходит в режим бесконтактной машины постоянного тока, т. е. вращается с максимальной рабочей частотой, а прохоледение пачки из трех импульсов по каналу коммутатора «назад соответствует прохождению одного импульса по каналу «вперед.
В конечном итоге скорость определяется как функция энергии, пропорциональной разности площадей, ограниченных кривой синхронизирующего момента для разгона и торможения (фиг. 2,а). При этом диапазон скорости вращения двигателя изменяется в широких пределах, а именно, начиная от сверхнизких частот, когда площади, определяющие разгона и торможения, мало отличаются одна от другой, и кончая максимальной рабочей скоростью двигателя, когда энергия торможения практически равна нулю.
Если сигнал рассогласования очень мал, то двигатель работает в режиме единичных шагов, и управляющие импульсы поступают только от дифференциаторов 4 и 5.
Благодаря подтормаживанию на каждом шате путем смещения синхронизирующего момеита при определенных положениях ротора разностная энергия, вводимая в систему шагового привода, расходуется на полезную работу, не создавая при этом избытка энергии, характерного для разомкнутых систем, и идущего на колебательные движения ротора, что
особенно опасно на резонансных частотах, так как может нривести к нел елательным автоколебаниям в системе.
Формула изобретения
Следящая система, содержащая последовательно соединенные устройство сравнения, усилитель, пороговое устройство, первый выход которого через первый дифференциатор и элемент «И, а второй выход через вторые дифференциатор и элемент «И соединены с соответствующими входами коммутатора, соединенного с обмотками шагового двигателя, механически соединенного с датчиком шагов и
через исполнительный механизм с устройством сравнения, ключ, триггер и линию задержки, отличающаяся тем, что, с целью повышения плавности регулирования, система содержит формирователь импульса и элемент «ИЛИ, первый вход которого соединен со входом триггера и выходом датчика ша-гов, второй - с другим входом триггера, входом линии задержки и с выходом формирователя
импульсов, вход которого подключен к выходу усилителя через ключ, управляющий вход которого соединен с выходом триггера, выход линии задержки соединен с третьим входом элемента «ИЛИ, выход которого соединен с
другими входами элементов «И.
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1975 |
|
SU547726A1 |
| Следящая система | 1975 |
|
SU585474A1 |
| Устройство для управления шаговым двигателем | 1989 |
|
SU1721783A1 |
| Система программного управления | 1982 |
|
SU1022116A1 |
| Способ старт-стопного управления шаговым электродвигателем | 1980 |
|
SU902194A1 |
| ШАГОВЫЙ ЭЛЕКТРОПРИВОД | 1988 |
|
RU2076451C1 |
| Двухдвигательный электропривод с механическим дифференциалом | 1973 |
|
SU866678A1 |
| Устройство управления шаговым двигателем с замкнутым контуром регулирования | 1988 |
|
SU1624407A1 |
| Способ старт-стопного управления шаговым двигателем | 1986 |
|
SU1363417A1 |
| Устройство для согласования углового положения синхронно-вращающихся валов электродвигателей постоянного тока | 1983 |
|
SU1100700A1 |
/ ,ГЛ Л
г -р
I
ШПУ YJVU Y11I а X XI XIIXJ и
Оси пространственного полотне ния импульсов дйтчина и/агов
fui 2
