1
Изобретение относится к обпасти систем автоматического регулирования и может быть использовано в дискретных следящих системах автоматического управления и кибернетики, к которым предъявляются повышенные требования по быстродействию и точности обработки управляющего сигнала.
Известна следящая система с шаговым двигателем, состоящая из чувствительного Э1юмента, подключенного на вход усилителЯ| выхад которого включен одновременно на вход схемы управления шаговым двигателем и на вход управления скоростью двигателя, причем выход последнего включен на один из входов чувствительного элемента, на другие входы которого подключены соответственно задатчик и датчик регулируемой величины. Указанная следящая система позволяет за счет использования режима программного разгона двигателя до частот выще частоты приемности повысить скорость отработки больших рассогласований.
Недостатком такой следящей системы является снижение рабочей частоты двигателя при некотором пороге селектирования
для предотвращения пропуска шагсж, гак как в системе используется разомкнутый привод l.
Существенно повысить быстродействие шагового привода удается при использовании датчика шагов на валу двигателя. Однако известная следящая система, использующая шаговый электропривод в режиме самокоммутации имеет ограниченные функциональные возможности по реализации режимов управления (реверс, торможение, отработка единичных шагов) l2j.
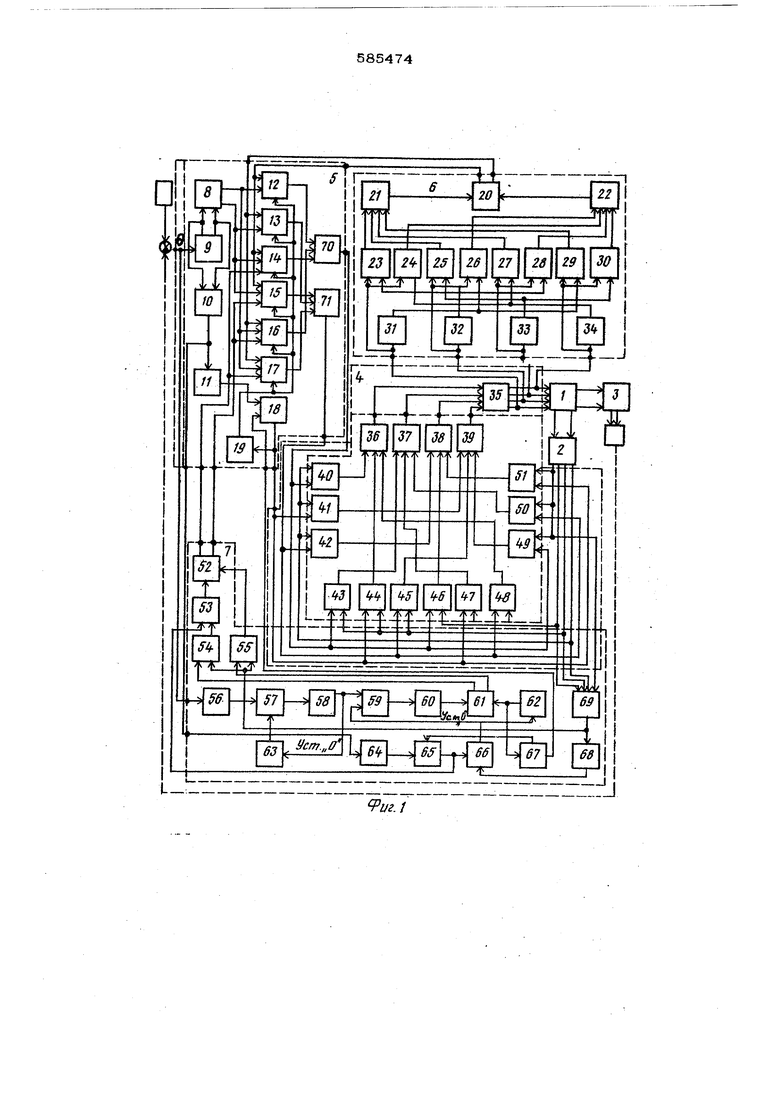
Указанные недостатки исключены в следящей системе, содержащей элемент сравнения, к первому и второму j входам которого подключены соответственно задатчик и датчик регулируемой величины, блсж усилите/юй, выходы второго соединены соответственно с входами блока сиредвления знака скорости и с обмотками управления шагового двигателя, который механически соединен с датчиком шагов и через объект регулирования - с датчиком регулируемой величины, коммутатор, одни из входов и выходы которот-о подключены соответственно к выходам датчика шагов и входам блока усилителей. Эта . следящая система является наиболе близкой к изобретению по технической сущности к достигаемому результату, так как позволяет реализовать плавное регулировани во всем диапазоне изменения величины рассогласования. Однако, система имеет ограниченную скорость слежения при заданной точности з/. Целью изобретения является повышение тс чности системы. Это достигается тем, что в известную следящую систему дополнительно установле- ны блок задания программы и логический бло i первые входы которых подключены к выходу элемента сравнения, первый, второй и третий выходы блока задания {программы соединень соответственно со вторы третьим и четвертым входами логического блока, к пятому и шестому входам которого подключены соответственно выходы блока определения знака скорости, первый, второй и третий выходы логического блока соединены соответственно с другими входами коммутатора, , четвертый выход логи- .чешского блока подключен ко второму входу бл }ка задания программы, к другим входам которого подключены соответственно выходы датчика шагов, При этом логический блок содержит пороговый элемент, вход которого подключен к первому входу логического блока, первый и второй выходы порогового элемента сое- динень соответственно с первыми и вторым входами первого элемента ИЛИи триггера, первый выход которого соединен с первыми входами первого, второго и третьего элеме тов И, второй {выход триггера.соединен с первыми входами четвертого, пятого и шее- того элементов Н, второй вход логического блока соединен со вторыми входами третьег и пятого элементов И,, третий вход - со вторыми входами второго ч шестого элемен тов И, (четвертый вход - с первым входом седьмого элемента И,пяуый вход - со вторым входом четвертого и с третьими входа второго и третьего элементов И, и шестой вход - со вторым входом первого и с третьими входами пятого и шестого элементов И, Выход первого элемента ИЛИ соединен с четвертым выходом : логического блока и через первый элемент НЕ - со вторым входом седьмого элемента И, выход которого подключен к третьему выходу логического блока и через второй элемент НЕ - к третьим входам первого и четвертого и к четвертым входам второго, третьего, пятого и шестого элементов И, выходы первого, второго и пятого элементов И .через второй элемент ИЛИ подключены к первому выходу логического блока, ко второму выходу которого через третий элемент ЛИ подключены выходы третьего, четвертого и шестого элементов И. Кроме того, блок задания/программы содержит нуль-орган, первый вход коюрого через усилитель соединен с тервым входом блока задания программы, ..второй вход| которого через дифференцирующую цепь подключен к первому входу первого элемента I:, выход которого соединен с первыми входами; первого и второго элементов ИЛИ, ко второму входу первого; из которых через элемент задержки подключен выход третьего элемента ИЛИ, выход первого элемента ИЛИ соединен с первым входом Счетчика и через первый генератор развертки с входами первого пороговых элементов, первьй и второй выходы первого порогового элемента подключены соответственно к первым входам второго и третьего элементов И, выходы которь1х соединены соответственно со вторым входом второго элемента ИЛИ и с первым входом триггера, ко второму входу которого подключен выход второго элемента ИЛИ, выход нуль-органа соединен с входом формирователя импульсов, выход которого подключен ко второму счетчика и через второй генератор развертки - ко второму входу нуль-органа, выход счетчика через преобразователь код- аналог соединен со вторым входом пер-, вого порогового элементу, другие входы блока задания программы подключены соответственнок входам третьего элемента ИЛИ, выход которого соединен со вторыми входами второго и третьего элементов И, а первыйи вторые вых.оды триггера и второго порргового элемента соединены соответственно с первым, вторым, третьим выходами блока задания программы и со вторым входом первого элемента И. На фиг. 1 представлена структурная схема следящей системы; на фиг. 2 - фазовый портрет, поясняющий особенности работы системы в различных режимах. Следящая система, к первому входу эпемента сравнения которой подключен задет- чик, состоит из шагового двигателя 1, с валом к.оторого механически соединен датчик шагов 2 и объект регулирования 3 с да-рчиком регулируемой величины, подключенным ко второму входу элемента сравнения (главная обратная связь на фиг. 1 показана штриховой линией), коммутатора 4, один из входов (первые входы элементов И 4О-51) и выходы (элементы ИЛИ 36-39) которого подключены соогве.тств.епно к рл гходам датчика шагов 2 и входам блока уси.тигелей 35, ВЫХОДЫ когорогх) соединены соответственно с входами блока определения знака скорости бис обмотками управлени шагового двигателя 1, логического блока и блока Задания программы 7. Логический блок 5 имеет шесть входов и четыре выхода. Он состоит из триггера 8, к входам которого подключены выходы порогового элемента 9, вход которого подключен к первому входу логического блока 5. Выходы порогового элемента 9, кроме того, подключены соответственно к входам первого элемента ИЛИ 10, выход которого подключен на вход первого элеме га НЕ 11. Первый выход триггера 8 соединен с первыми входами первого, и третьего элементов И 12, 16 и 17. Второй выход триггера 8 соединен с первым .входами.четвертого, пятого и шестого элементов И 13, 14 и 15. Второй вход логиче.ского блока В соединен со вторыми входами третьего и пятого элементов И 14 и 17, третий вход - с втдрыми входами второго и шестого элементов И 15 и 16, червертый вход - с первым входом седьмо элемента И 18, пятый вход - со вторым входом четвертого элемента И 13 и с третьими входами второго и третьего элементов, И 16 и 17, и шестой вход - со вторым входом первого элемента И 12 и с третьими входами пятого и шестого элементов И 14 И 15. Выход первого элемен та ИЛИ 10 соединен с четвертым выходом логическо1-о блока 5. Выход первого элемента НЕ 11 соединен со вторым входом седьмого элемента И 18, выход которого подключен к третьему выходу логическог блока 5 через второй элемент HR 19 - к третьим входам первого и четвертого элементов И 12 и 13 и к четвертым входам второго, третьего, пятого и шестого.элеме тов И 14, 15, 16 и 17. Выходы первого, второго и пятого элементов И 12, 14 и 16 через второй элемент ИЛИ 7О подключены к первому выходу логического бл ка 5, ко второму выходу которого через третий элемент ИЛИ 71 подключены выходы третьего, четвертого и шестого элемен И 13, 15 и 17. Блок задания программы 7 содержит нуль-орган 57, первый вход которого через усилитель 56 соединен с первым входом блока задания программы 7, второй вход которого через дифференцирутсяцую цепь 64 подключен к первому входу первого элемен та И 65. Выход элемента И 65 соединен с первыми входами первого и второго элементов ИЛИ 66 и 53. Ко второму входу элемента ИЛИ 66 через элемент задержки 68 подключен выхэа г{ютьего элемент ИЛИ 69. Выход первого элемента ИЛИ 66 соединен с первым входом счетчика .9 и через первый генератор развертки 62 - с входами первого и второго пороговых элементов 61 и 67. Первый и второй выходь первого пороговогоэлемента 61 подключены соответственно к первым входам второго и третьего элементов И 54 и 55, выходы которых соединены соответственно со вторым входом второго элемента ИЛИ 53 и с первым входом триггера 52, ко второму входу которого подключен выход второго элемента ИЛИ 53. Выход нуль-органа 57 соединен с входом формирователя импульсов 58, выход котррого,Ттодключен ко второму входу сЧетчика 59 и через второй генератор развертки 63 - ко второму входу нуль-ортана 57. Выход счетчика 59 через преобразователь | код - аналог 6О соединен со вторым входом первого порогового элемента 61. Другие входы блока задания программы 7 подключены соответственно к входам третьего элемента ИЛИ 69, выход которого соединен со вторыми входами второго и третьего элементов И 54 и 55. Первые и вторые выходы триггера 52 и второго порогового элемента 67 соединены соответственно с первым, вторым, третьим Выходами блока j задания программы 7 и со вторым входом первого элемента И 65. К первым входам блока задания программы 7 и логического блока 5 подключен выход элемента сравнения. Первый, второй и третий выходы блока задания программы 7 соединены соответственно со вторым, третьим и четвертым входами логического блока 5, к пятому и шестому входам которого подключены соответственно выходы блока определения знака скорости 6. Первый, второй и третий выходы логического блока 5 соединены соответственно с входами коммутатора 4 (вторые входы элементов И 40-51). Четвертый выход логического блока 5 подключен ко второму входу блока задания программы 7, к другим входам которого подключены соответственно выходы датчика шагов 2. Следящая система работает следующим образом. Режим работы двигателя 1 задается управляющими командами логического блсжа 5. При наличии управляющего сишала на выходе элемента ИЛИ 70 разрешающий сигнал поступает на элементы И 4О, 43, 46 и 49 и обмотки управления двигателя коммутируются таким образом. Что ротор вращается в прямом .направлении. При управляющем сигнале, поступающем с выхода элемента ИЛИ 71, сигналы с датЧика шагов проходят через элементы И 42 45, 48, 5О и ротор вращается в обратном вправлении.
Сигнал с выхода элемента И 18 поступает на элементы И 41, 44, 47, 51 и ротор фиксируется в одном из устойчивых положений.
Пороговый элемент 9 логического блока 5 имеет три УСТОЙЧИВЫХ состояния. Если сигнал ошибки превышает зону нечувствигельностя, то на одном из выходов порогового алемента 9 в зависимости от знака рассогласования появляется высокий потенциал Если сигнал ошибки меньше величины эоны нечувствительности, то на обоих выходах имеет место нулевой потенциал.
Блок знака скорости 8 выявляет направление вращения двигателя, используя в качестве входных сигналов имЛульсы, поступающие с усилителя мощности 35 на обмотки управления шагового двигателя 1. При включении очередной фазы на выходе одной из дифференцирующих пепей 31-34 появляется импульс, который проходит через один из элементов И 23-30 в зависимости от комбинации включения в этот момент других обмотсж. Например, при работе двигателя i с четырехтактной попарной коммутацией обмоток по системе - 12- -23-34-41 - при включении фазы 3 и отключения фазы 1 включенной фазой может быть также фаза 2 или 4. При этом переход с положения 23 на 12 будет соответствовать отрицательному направлению вращения, а пepexoдvc положения 34 на 41 положительному. Выходы элементов И, пропускающих импульсы, соответствующие одному я тому же направлению вращени объедин5потся элементами ИЛИ 21 и 22 подсоединяются к входам триггера 2О, ко торый осуществляет запоминание направления вращения на каждом щаге.
В блоке задания программы 7 реализуется зависимость
,
Информация о величине скорости вращения двигателя снимается с датчика mart 2.
Время обработки шаги обратнопропорционально средней скорости вращения двига теля 1 на шаге:сЛ 1
поэтому уравнение линии переключения можно представить как
где « ciL Vo:555.
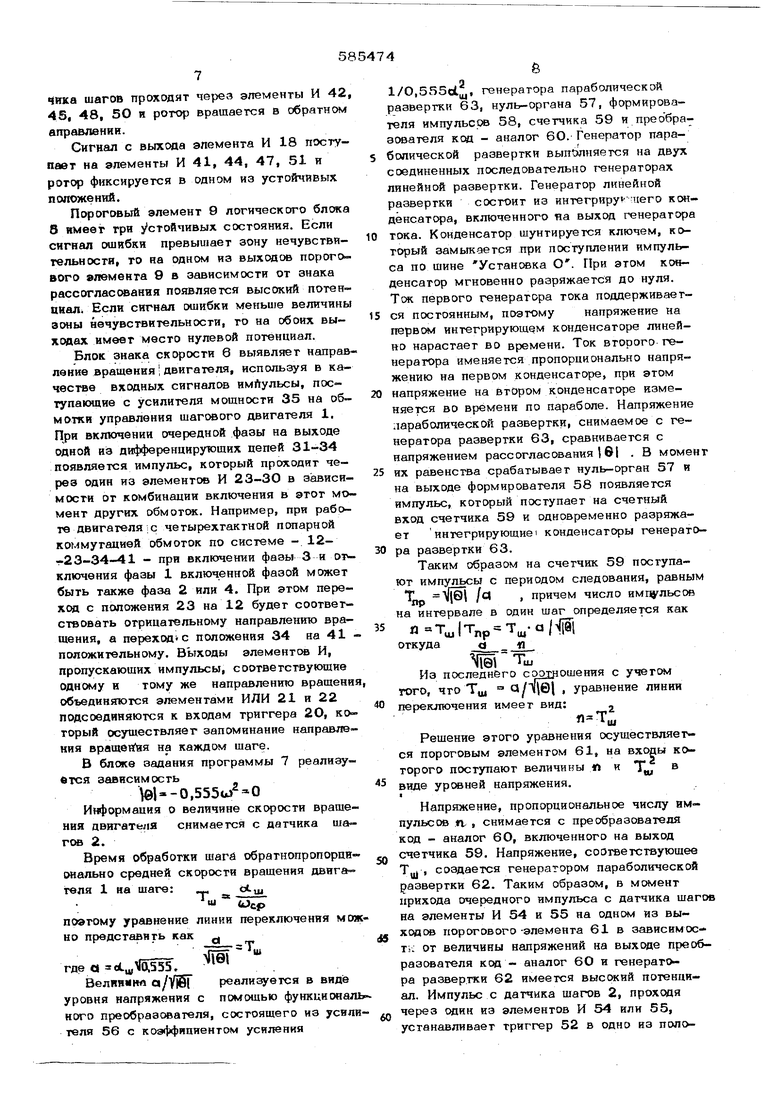
Велкпмнт а/У|бГ реализуется в виде уровня напряжения с помощью функциональ ного преобразователя, состоящего из усилителя 56 с коэффициентом усиления
l/O,555tiJy, генератора параболической развертки 63, нуль-органа 57, формирователя импульсе 58, счетчика 59 и преобразователя код - аналог ВО. Генератор параболической развертки вып шняется на двух соединенных последовательно генераторах линейной развертки. Генератор линейной развертки состоит из интегрирую шего конденсатора, включенного на выход генератор тока. Конденсатор шунтируется ключам, к торый замыкается при поступлении импульса по шине Установка О . При атом конденсатор мгновенно разряжается до нуля. Ток первого генератора тока поддерживается постоянным, поэтому напряжение на первом интегрирующем конденсаторе линейно нарастает во времени. Ток второго генератора именяется пропорционально напряжению на первом конденсаторе, при этом напряжение на Втором конденсаторе изменяется во времени по параболе. Напряжение параболической развертки, снимаемое с генератора развертки 63, сравнивается с напряжением рассогласования I в1 . В моме их равенства срабатывает нуль-орган 57 и на выходе формирователя 58 появляется импульс, который поступает на счетный вход счетчика 59 и одновременно разряжает интегрирующие конденсаторы генератра развертки 63.
Таким образом на счетчик 59 поступают импульсы с периодом следования, равны
Т„р 1 /а
, причем число им щ лье еж в один шаг определяется как
на интервале
№
П«Т.
Т Т М пр щ
ш
откуда
ОП
Из последнего с оотношения с учетом того, что Тщ , уравнение линия переключения имеет вид:
Решение этого уравнения осуществляется пороговым элементом 61, на входы которого поступают величины « и Т, в виде урсжней напряжения.
Напряжение, пропорциональное числу ямпульсов .ft , снимается с преобразователя код - аналог 6О, включенного на выход счетчика 59. Напряжение, соответствующее Tjij , создается генератором параболической развертки 62. Таким образом, в момент прихода очередного нмпупьса с датчика шаг на элементы И 54 и 55 на одном из выходов порогового-элемента 61 в зависимосTi: от величины напряжений на выходе преобразователя код - аналог 6О и генерат« ра развертки 62 имеется высокий потенциал. Импульс с датчика щагов 2, проходя через один из элементов И 54 или 55, устанавливает триггер 52 в одно из положений, определяющих разгон или торможе ние двигателя. После считывания информаци со счетчика 59 и генератора развертки 62 импульс датчика шагов 2 через линию задержки 68 устанавливает нх в исходное состояние, после чего начинается формирование линии переключения на следующем ша ге двигателя. Если двигатель 1 находится в режиме фиксации в зоне нечувствительности, то при появлении сигнала рассогласования первый импульс на формирование линии переключения проходит по дифференцирующей цепи 64 которая срабатывает при появлении высокого потенциала на одном из выходов порог№ого элемента 9. Этот импульс через элемент И 65 и: элемент ИЛИ 66 также поступает по шине Установка О на входы счетчика 59 и генератора развертки 62. Если же при нулевом рассогласовании дайгатель 1 имеет значительную скорость, то при срабатывании порогового элемента 9 импульс с дифференцирующей цепи 64 через элемент И 65 не п|)оходит, так как на втором входе присутствует запрещающий потен циал, снимаемый с порогового элемента 67 Пороговый элемент 67 срабатывает и выда ет разрешающий потенциал только при превышении сопряжения на выходе генератора развертки 62, напряжения порога срабатыБйНйя. Это напряжение соответствует скоро ти, с которой, двигатель 1 тормозится на фиксированном участке без.выбега. Импульс элемента И 65 поступает также через элемент ИЛИ 53 на- вход триггера 52 и устанавливает его в положение, соответству ющее разгону двигателя, для того, чтобы уже йа первом шаге двигателя движение осуществлялось в требуемом направлении. Фазовая плоскость (см. фиг. 2) разбивается линиями переключения пороговых элементов 9, 61 я 67 и триггером 20 на ряд областей. Штрихами показаны линии переключения, которые исключены алгоригмом управления системы. Для синтеза алгоритма используется, таким образом, семь областей, границы которых отмечены сплошными линиями. Каждой из этих областей соответствует один из элементе И 12-18. Часть фазовой плоскости с координатами @ e 4-@jj и.tO принадлежит области 1У, а с координатами -© ® +®дИЦХ- ь). - области III. Это достигается с помощью триггера 8, включенного на выходы поротового элемента 9, который запоминает предыдущее значение координаты при отключении порогового элемента 9. На выходах элементов И 12, 14, 16 вы сокий потенциал появляется тогда, когда координаты системы находятся в пределах I, 1JJ И областей с о ответствен но. Вых; ды указдпных элементов обч.одинпются элементами ИЛИ 7О, .так какзнакупрпвляющото воздействия на всех трех участках одинаков, и подаются на вход коммутатора 4, обеспечивающего этот знак управляющего воздействи:. Аналогичным образом выходы элементов И 13, 15 и 17, включение одного из которых означает, что координаты системы находятся в области П, ГУ или , объединяются элементом ИЛИ 70. и включаются на вход коммутатора 4 другого знака. На входы элементов И 12 и 13 включаются только выходы триггеров 8 и 20, так как при нахождении фазовых координат системы в областях i и Ц, информации с этих элементов достаточно для Bi i6oра нужного знака управляющего воздействия. На элементы И 14-17 подаются сигналы и с блока Задания программы 7, так как управляющее воздействие зависит также от того, по какую сторону линии переключения находятся пороговые координаты системы UJfl и 0. Режим фиксации осуществляется в области УП только после того, как рассогласование и скорость двигателя станут меньше пороговых значений. Если на обоих выходах порогового элемента 9 появятся нулевые потенциалы, то на выходе элемента НЕ 11 будет выс,«ий уровень напряжения, который поступает разрешающим сигналом на один из входов элемента И 18. Второй разрешающий сигнал приходит на элемент И 18 с порогового элемента 67 блока задания программы 7, когда скорость двигателя станет ниже пороговой. Режим фиксации двигателя, осуществляющий при этом, происходит с исчезновением разрешающих . уровней напряжения на выходах элементов И 12-17, гак как сигнал с выхода элемента И 18 инвертируется элементом НЕ 19 и подается на входы элементов И 12-17. Рассмотренная следящая система позволяет отрабатывать в квазиоптимальном режиме входные воздействия типа скачок угла . При атом, как показывает опыт, в основном совершается не более одного пополнительного переключения в переходном процессе. Входные воздействия типа скачок скорости система отрабатывает в вибрационном режиме, имея при этом некоторую динамическую ошибку. Использование предлагаемого изобретения позволит значительно увеличить точность сложения (в 2-3 раза) при повышенных скоростях отработки сигнала рассогласования. Кроме того, эта следящая система за счет уменьшения колебательности и увеличения устойчивости обладает более высоким. качествами отработки входного сигнала. . Формула изобретения 1.Следящая система, содержащая элеме сравнения, к первому и второму входам которого подключены соответственно задатчик и датчик регулируемой величины, блок усилителей, выходы которого соединены соответственно с входами блока определения знака скорости и с обмотками управления шагового двигателя, который механически соединен с датчиком шагов и через объект регулирования - с датчиком регулируемой величины, коммутатор, один из входов и вы ходов которого подключены соответственно к выходам датчика шагов и входам блока усилитедей, отличающаяся тем, что, с целью повышения точности системы, она содержит блок задания программ и логический блок, первые входы которых подключены к выходу элемента сравнения, первый, второй и третий выходы блока задания программы соединены соответственно со вторым, третьим и четвертым входами логического блока, к пятому и шестому входам которого подключены соответственно выходы блока определения.знака скорости, первый. Второй и третий выходы логического блока соединены соответственно с другими входами коммутатора, четвертый выход логического блока подключен ко втором входу блока задания программы, к другим .входом которого подключены соответственно выходы датчика шагов. 2.Следяшая система по п. 1, о т - личаюшвяс,я тем, что логический блок содержит пороговый элемерт, вход Kt торого подключен к первому входу логического блсжа, первый н второй выходы порогового элемента соединены Ьоогветственно с первыми и вторыми входами первого Э1Юмента ИЛИ и триггера, первый выход которого соел чен с первыми входами первого, второго и третьего элементов И, вых{ триггера соединен с первыми входами четвертого, пятого и шестого элементе И, второй вход логического блока соединен со вторыми входами третьего и пятого элементов И, третий вход - со вторыми входами второго и шестого элементов И, четвертый вход - с первым вхойом седьмого элемента И, пятый вход - со вторьм входом четвертого в с третьими входами второго и третьего элементов И, и шестой вход - со вторым входом первого и с третьими входами ви того и шестого элементов И, выход первого элемента ИЛИ соединен с четвертым выходом логического блока я через первый элемент НЕ - со вторым вхопом седьмого элемента И, выход которого подключен к третьему выходу логического блока и через второй элемент НЕ - к .третьим входам первого и четвертого и к четвертым входам, второго, третьего, пятого и шестого элементов И, выходы первого, второго и пятого элементов И через второй элемент ИЛИ подключены к первому выходу логического блока, ко второму выходу которого через третий элемент ИЛИ подключены выходы третьего, четвертого и шестого элементов И. 3. Следящая система по п. 1 отличающаяся тем, что блок задания программы содержит нуль-орган, первый вход которого через усилитель соединен с первым входом блока задания программы, второй вход которого через дифференцирующую цепь подключен к первому входу первого элемента И, выход которого соединен с первыми входами первого и второго элементов ИЛИ, ко второму входу первого из которых через элемент задержки подключен выход третьего элемента ИЛИ, выход пер вого элемента ИЛИ соединен с первым входом счетчика и через первый генератор развертки - с входами первого и второго пороговых элементов, первый и второй выходы первого порогового элемента подключены соответственно к первым входам второго и третьего элементов И, выходы которых соединены соответственно со вторым входом второго элемента ИЛИ и с первым входом триггера, ко второму входу которого одключен выход второго элемента ИЛИ, выход нуль-органа соединен с входом-форми: рователя импульсов, вьпсод которого подключен ко вторс лу входу счетчика и через второй генератор развертки - ко второму входу нуль-органа, выход счетчика через преобразователь код - аналог соединен со вторым входом первого порогового элемента, другие входы блсжа задания программы подключены соответственно к входам третьего элемента ИЛИ, выход которого соединен со вторыми входами второго и третьего элементов И, а первые и вторые выходы триггера и второго порогового элемента соединены соответственно с первым, вторым, третьим выходами блсжа задания программы и со вторым входсм первого элемента И. Источники информации, принятые во внимание при экспертизе; 1.Авторское свидетельство СССР № 237228, KJL & 05 F, 12.02.8. 2.Авторское свидетельство СССР № 216078, кл. (3 О5 F, О5.О2.65. 3.Авторское свидетельство СССР N9 494725, кл. G Об В 11/14, 28.01.74.
i
:.J
9иг. i


| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1982 |
|
SU1081622A1 |
| Устройство для управления сборочным роботом | 1980 |
|
SU1075233A1 |
| Следящая система | 1975 |
|
SU547726A1 |
| УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ С ШЕСТЬЮ СТЕПЕНЯМИ ПОДВИЖНОСТИ И ЛИНЕЙНО ПЕРЕМЕЩАЕМЫМ В ГОРИЗОНТАЛЬНОЙ ПЛОСКОСТИ ОСНОВАНИЕМ | 2022 |
|
RU2794082C1 |
| Устройство для управления водоснабжением участка гидрошахты | 1982 |
|
SU1115020A1 |
| Система автоматизированного управления транспортными перемещениями ковша экскаватора-драглайна | 1989 |
|
SU1788163A1 |
| Цифровой следящий электропривод | 1979 |
|
SU800960A1 |
| СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ СБОРОЧНЫМ УСТРОЙСТВОМ | 1991 |
|
RU2029335C1 |
| Устройство раздельного управления вентильными группами преобразователя частоты для асинхронного электропривода | 1988 |
|
SU1545305A1 |
| Устройство программного управления кругловязальной машиной | 1979 |
|
SU874799A1 |