(54) ДВУХДВИГАТЕЛЬНЫЙ ЭЛЕКТРОПРИВОД С МЕХАНИЧЕСКИМ ДИФФЕРЕНЦИАЛОМ


| название | год | авторы | номер документа |
|---|---|---|---|
| Двухканальная следящая система | 1975 |
|
SU570880A1 |
| Двухдвигательный следящий электропривод | 1973 |
|
SU479085A1 |
| Преобразователь код-угол | 1974 |
|
SU470845A1 |
| Дискретный электропривод | 1978 |
|
SU911456A1 |
| Дискретный электропривод | 1976 |
|
SU744440A1 |
| Дискретный электропривод | 1977 |
|
SU809055A1 |
| Регулятор скорости | 1975 |
|
SU559226A1 |
| Устройство для регулирования скорости вращения электродвигателя | 1981 |
|
SU955471A1 |
| СИНХРОННО-СИНФАЗНЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2310971C1 |
| Дискретный электропривод с импульсной системой фазирования | 1976 |
|
SU723498A1 |


I
Изобретение относится к электротехнике и может быть использовано в испытательных машинах, тарировочных центрифугах, металлорежущих станках, где требуется широкий диапазон регулир ования скорости и высокая точность ее стабилизации.
Наиболее близким техническим решением к предлагаемому изобретению является двухдвигательный электропривод с механическим дифференциалом, содержащий два канала стабилизации скорости, каждый из которых состоит из последовательно соединенных делителя частоты, аста тического регулятора скорости, двигателя, частотного датчика обратной связи, валы двигателей соединены с входными валами дифференциала, выходной вал которого соединен с нагрузкой D3«
Недостатками известного электропривода являются невысокая для некоторых точных меха шзмов равномерность вращения выходного вала и возникающие из-sj. этого биения из-за кинематической погрешности, механической упругости, нестабильности момента трения и т,д.
Цель изобретения - повышение надежности . работы электропривода.
Поставленная цель достигается тем, что в устройство введены дополнительный двигатель, дифференциальный частотный датчик, третий делитель
10 частоты, блок фазового сравнения частот и третий астатический регулятор, один из входов которого соединен с выходом делителя частоты одного стабилизации скорости, а выход - с
ts дополнительными двигателем, вал которого соединен с выходом дифференциального частотного датчика, один выход .дифференциального частотного датчика подключен к второму входу третьего
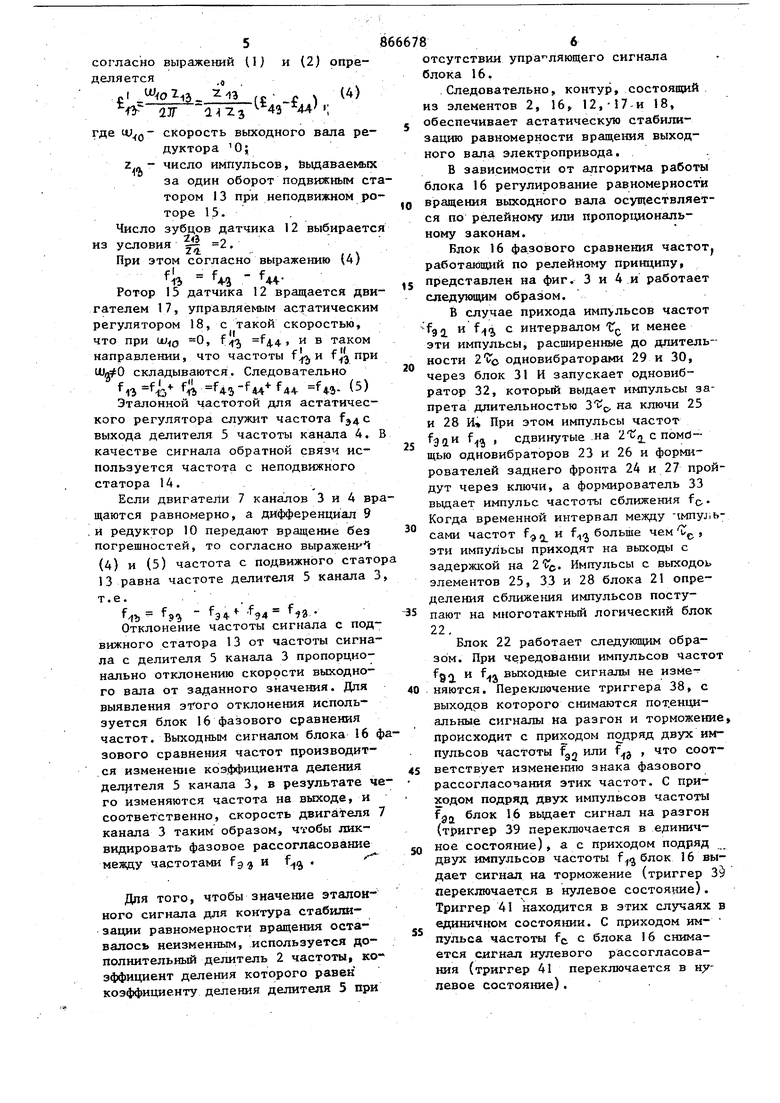
20 астатического регулятора, а второй к одному КЗ входов блока фазового сравнения частот, второй вход которого подклйчен к выходу третьего делителя частоты, а выход - к входу делителя частоты другого канала стабилизации скорости, вход третьего де лителя частоты подключен к выходу кварцевого генератора. На фиг. 1 приведена блок-схема электропривода; на фиг. 2 - конструкция дифференциального частотного датчика; на фиг. 3 - схема блока определения сближения импульсов; на фиг. 4 - схема многотактового логического блока. Электропривод содержит кварцевь генератор 1, выход которого соединен с делителем 2 частоты и ДВУМЯ идентичными каналами 3 и 4 стабилизации скорости, каждый из которых состоит из последовательно соединенных делителя 5 частоты астатического регуля тора 6 скорости; электродвигателя 7 и частотного датчика 8 скорости. Выходы частотных датчиков соедине ны с входами астатических регуляторов своего канала. Валы обоих двигателей соединены с механическим дифференциалом 9, выходной вал которого соединен с редуктором 10, выходной . вал которого в свою очередь соединен с нагрузкой 1 и дифференциальными частотными датчиками 12 Датчик 12 состоит из подвижного статора 13, не подвижного статора 14 и ротора 15. Выход статора 13 соединен с одним . входом блока 16 .фазового сравнения частот. С подвижным ротором 15 соеди нен вал электродвигателя I7, управ- ляемого астатическим регулятором 18 скорости, один вход которого соединен с выходом делителя 5 частоты канала 4, а второй вход - с выходом не подвижного статора 14. В пазы статоров 13 и 14 уложены обмотки 19 и 20 i Блок 16 фазового сравнения частот состоит из последовательно соединенных блока 21 определения сближения импульсов на временной интервал Т и многотактного логического блока 22 Блок 21 состоит из последовательно соединенных одновибратора 23, формирователя 24 задних фронтов, схемы 25 И, причем вход одновибратора 23 .соединен с подвижным статором 13, по . ледовательно соединенных одновибратора 26, формирователя 27 задних фронтов, схемы 28 И, причем вход одновибратора 26 соединен с выходом де лителя 2 частоты, одновибраторов 29 и 30, входы которых соединены соотве ственно с одновибраторами 23 и 26, а выходы - с схемой 31 И, с которой последовательно соединены одновибратор 32 и формирователь 33. Схемы 28 и 25 И соединены между собой и с входом форйирователя 33. Выходы скем 28 и 25 И соединены соответственно с линиями 34 и 35 задержки Многотактного логического .блока (фиг. 4), выходы которых соединены с входами триггера 36 и со схемами 37 и 38 И, выходы которых соединены с триггером 39, Входы линий 34 и 35 задержки соединены со схемой 40 ИЛИ, выход которой соединен с одним входом триггера 41, с другим входом которого соединен вшсод формирователя 33. Электропривод работает следующим образом. При отработке приводом задающего воздействия, изменякщегося с постоянной скоростью, которая задается соответствующей з становкой в делителе 5 частоты канала 3, двигатель 7 канала 4 вращается с постоянной опорной скоростью. Средняя скорость вращения выходного вала редуктора определяется выражением ou -ujjj. ТГ скорость первого .двигателя; vi(j- скорость второго двигателя; i - передаточный коэ4х} ициент редуктора. При зтом ч стоил с выходов частотиых датчиков 8 скорости каналов 3 и 4 соответственно равны Zs , л «Vl4 4515Г 2F где z ZA. число импульсов, вьщаваЧ Ч емых датчиками за один оборот (число меток на датчик(, как правило 2 24;. скорости двигателей и Шд. налов 3 и 4 (в формуле U соответственно cttjH . В установившемся режиме, благодаря астатическому способу регулирования скоростей, задающие частоты fgj и fj делителей 5 каналов 3 и 4 и частоты датчиков 8 в среднем равны между собой, т.е. f59 Й ; f34 44 ) Частота с выхода подвижного ста-, тора 13 дифференциального частотного датчика 12 при неподвижном роторе 15 согласно выражений () и (2) определяется о „I , - . . (4) IJT ИТ-з где Q скорость вьгходного вала ре дуктора 0; z. - число импульсов, Выдаваемы за один оборот подвижньгм с тором 13 при неподвижном р торе 15. . Число зубцов датчика 12 выбирает из условия 1 2. При этом согласно выражению (4) 13 - 4-г 44Ротор 15 датчика 12 вращается дви гателем 17, управляемым асдратическим регулятором 18, с такой скоростью, что при ( -О, f,- f4.4 и в таком направлении, что частоты f и при складываются. Следовательно « V iV f4S-f44 f44 Uv (5) Эталонной частотой для астатического регулятора служит частота с выхода делителя 5 частоты канала 4. качестве сигнала обратной связи используется частота с неподвижного статора 14. Если двигатели 7 каналов 3 и 4 вр щаются равномерно, а дифференциал 9 и редуктор 10 передают вращение без погрешностей, то согласно выражени (4) и (5) частота с подвижного стато 13 равна частоте делителя 5 канала т.е. . - э V /1Ъ - 5 faОтклонение частоты сигнала с под вижного статора 13 от частоты сигна ла с делителя 5 канала 3 пропорционально отклонению скорости выходного вала от заданного значения. Дпя выявления эгого отклонения используется блок 16 фазового сравнения частот. Выходным сигналом блока 6 зового сравнения частот производится изменение коэффициента деления дел 1теля 5 канала 3, в результате ч го изменяются частота на выходе, и соответственно, скорость двигателя канала 3 таким образом, чтобы ликвидировать фазовое рассогласование между частотами fg и f . Для того, чтобы значение эталонного сигнала для контура стабилизации равномерности вращения оставалось неизменным, используется дополнительный делитель 2 частоты, ко эффициент деления которого равен коэффициенту деления делителя 5 при отсутствии упра- ляющего сигнала блока 16, Следовательно, контур, состоящий из элементов 2, 16, 12, 17-и 18, обеспечивает астатическую стабилизацию равномерности вращения выходного вала электропривода. В зависимости от алгоритма работы блока 16 регулирование равномерности вращения выходного вала осуществляется по релейному или пропортщональному законам. Блок 16 фазового сравнения частот работающий по релейному принципу, представлен на фиг. 3 и 4 и работает следуюиц1м образом. В случае прихода импульсов частот fgj и f с интервалом f- и менее эти импульсы, расширенные до длительности одновибраторами 29 и 30, через блок 31 И запускает одновибратор 32, который выдает импульсы запрета длительностью , на ключи 25 и 28 И При этом импульсы частот f , сдвинутые .на i i cuoMQ- щью одновибраторов 23 и 26 и формирователей заднего фронта 24 и 27 пройдут через ключи, а формирователь 33 выдает импульс частоты сближения fс.. Когда временной интервал между -1мпу;,ьсами частот и f больше чемi, , эти импульсы приходят на выходы с задершсой на 25с« Импульсы с выходоь элементов 25, 33 и 28 блока 21 определения сближе1шя импульсов поступают на многотактный логический блок 22, Блок 22 работает следующим образом. При чередовашш импульсов частот 91 la вьпсодьат сигналы не изменяются. Переключение триггера 38, с выходов которого снимаются пот.енциапьные сигналы на разгон и торможение происходит с приходом подряд двух импульсов частоты 2 и -гэ °° ветствует измене шю знака фазового рассогласования этих частот. С приходом подряд двух импульсов частоты fgj блок 16 выдает сигнал на разгон (триггер 39 переключается в единичное состояние) , ас приходом подряд двух импульсов частоты f блок 16 выдает сигнал на торможение (триггер 35 переключается в нулевое состояние). Триггер 41 находится в этих случаях в единичном состоянии. С приходом им- пульса частоты fc с блока 16 снимается сигнал нулевого рассогласования (триггер 41 переключается в ну левое состояние).
Таким образом, изобретение обеспечивает широкий диапазон регулирова ния скорости и высокую равномерность вращения.
Формула изобретения
Двухдвигательный электропривод с механическим дифференциалом, содержащий два канала стабилизации скорости , каящый из которьпс из последовательно соединенных делителя частоты, астатического регулятора скорости, двигателя, частотного датчика обратной связи, валы двигателей соединяют с входными валами дифференциал а, выходной вал которого соединен с нагрузкой, отличающийся тем, что, с целью повышения надежности, в него введены дополнительный двигатель, дифференциальный частотный датчик, третий делитель частоты, блок фазового срав нения частот и третий астатический
666788
регулятор, один из входов которого соединен с выходом делителя частоты одного канала стабилизации скорости, а выход - с дополнительным двига} телем, вал которого соединен с входом да{фференциального частотного датчика, один выход дифференциального частотного датчика подключен к второму входу третьего астатического регулятора, а второй - к одному из входов блока фазового сравнения частот, второй вход которого подключен к выходу третьего делителя частоты, а выход - к входу делителя частоты другого канала стабилизации скорости, вход третьего делителя частоты подключен к выходу кварцевого генератора.
Источники информации, принятые во внимание при экспертизе
. Двухдвигате 1ьный электропривод с механическим дифференциалом. -Отчет о научно-исследовательской работе Ивановского энергетического института, Иваново, 1972.
Г™1
ft
«
;а
и.
f
55
е
Н-1
/
-5
Я.
: $$SS$
ч.
W
Фиг,.1
п
УГ
ГГ
Ув
Фмг.4
