Изобретение относится к синхронизации контроллеров машинистов при телеуправлении локомотивами, находящимися в соединенных поездах.
Известны устройства для синхронизации управления локомотивами, состоящие из командного поста, установленного на головном локомотиве и содержащего блок управления, ручной и автоматический контроллеры и приемопередатчик, и соединенного с ним через линию связи исполнительного поста, установленного на дополнительном локомотиве и содержащего приемопередатчик, подключенный к другому блоку управления, и другой автоматический контроллер,присоединенный к-блоку переключения его позиции.
Однако в этих устройствах низка .надежность работы при передаче с головного локомотива на дополнительный команды «автоматический пуск или оброс позиции автоматического контроллера, что вызывает необходимость ручной доводки до заданной позиции автоматического контроллера допонительного локомотива мащинистом головного локомотива. Эта операция отвлекает машиниста от основных функций по обеспечению безопасности движения. Время синхронизации контроллеров головного и дополнительного локомотивов зависит от реакции машиниста головного локомотива. При его замедленной реакции может произойти разрыв автосцепки в составе. Цель изобретения - повышение надежности работы устройства.
Для этого в предлагаемом устройстве исполнительный пост снабжен блоками набора и сброса позиций автоматического контроллера и датчиком позиций, вход которого подключен через автоматический контроллер и блок переключения позиций к входам этих блоков, а
его выход присоединен к одним из входов б локов набора и сброса,, другие входы которых
подключены к блоку управления.
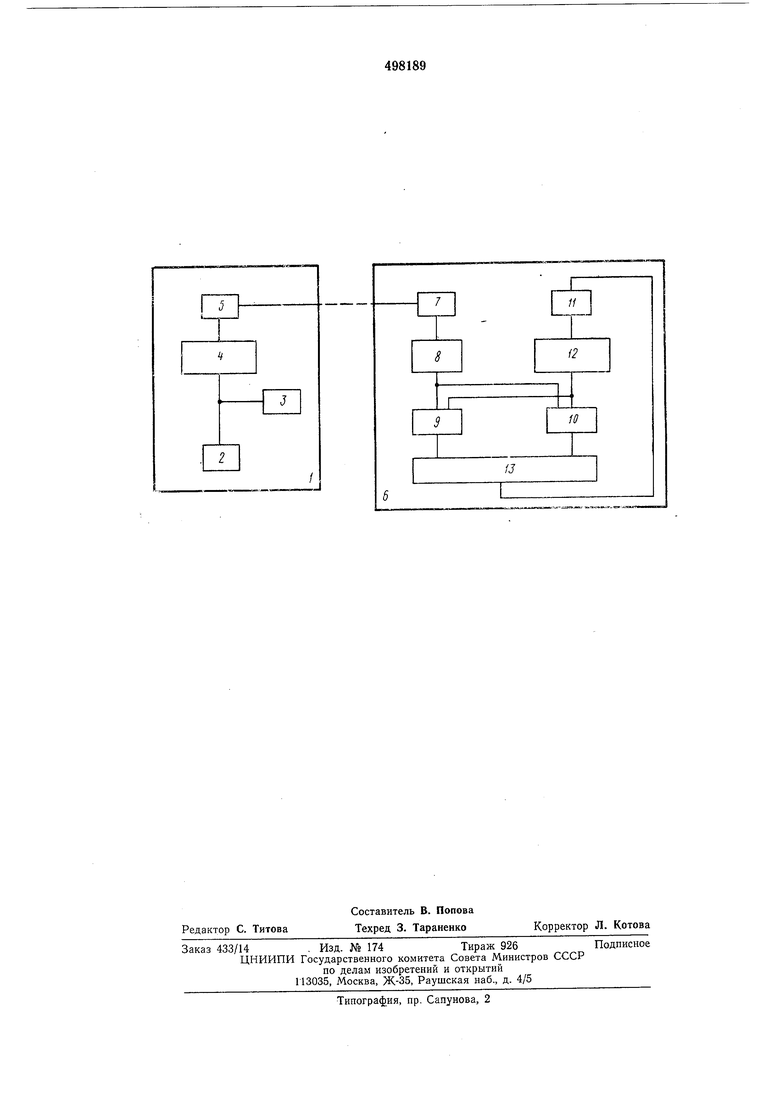
Па чертеже изображена блок-схема предлагаемого устройства.
Па головном локомотиве установлен командный пост 1, содержащий ручной контроллер 2, к выходу которого подключены автоматический контроллер 3 и блок 4 управления
командного поста 1.
Блок 4 управления через приемопередатчик 5 и линию связи связан с исполнительным постом 6, установленным на дополнительном локомотиве и содержащим приемопередатчик 7,
соединенный с блоком управления 8. К выходу
блока 8 присоединены один из входов блоков
9 сброса и блока 10 набора позиций другого
автоматического контроллера 11.
Другие входы блоков 9 и 10 связаны с автоматическим контроллером 11 через датчик 12
позиций. Выходы блоков 9 сброса и блока 10 набора соединены со входами блока 13 переключения позиции автоматического контроллера П.
Устройство работает следующим образом.
В исходном состоянии автоматический контроллер 11 исполнительного поста Ь, установленного на дополнительном локомотиве, находится в первой позиции (так как до этого была передана команда с головного локомотива о нахождении его автоматического контроллера 3 в первой позиции). При этом сигналы, поступающие с выхода датчика 12 позиции и с выхода блока 8 управления исполнительного поста б на входы блоков набора 9 и блока сброса 10 позиций автоматиечского контроллера 11, блокируют работу последних. В этом случае блок 13 переключения позиции находится в отключенном состоянии.
Когда машинист головного локомотива с помощью ручного контроллера 2 переводит автоматический контроллер 3 во вторую позицию, эта команда одновременно кодируется блоком 4 управления командного поста 1 и с помощьюприемопередатчика 5 командного поста 1 посылается на дополнительный локомотив. На дополнительном локомотиве команда принимается приемопередатчиком 7 исполнительного поста б, декодируется в его блоке 8 управления и поступает-на входы блоков 9 и 10 другого автоматического контроллера 11. Блок 9 набора позиции разблокируется и сигнал с его выхода поступает на вход блока 13 о переводе автоматического контроллера 11 во вторую позицию. При приходе автоматического коптроллера 11 во вторую позицию сигнал с выхода датчика 12 позиций запрещает дальнейщую работу блока 9 набора позиции, который отключает блок 13, и автоматический контроллер 11 остается во второй позиции. При последующем наборе позиций автоматического контроллера 3 машинистом с помощью ручного контроллера 2 работа вышеуказанных блоков происходит аналогично.
При сбросе автоматического контроллера 3 из второй ПОЗИЦИИ в первую машинистом с помощью ручного контроллера 2, после поступления команды об этом в исполнительный пост 6 разрешается работа блока 10 сброса позиций, который выдает сигнал в блок 13 о переводе автоматического контроллера И в первую позицию.
При приходе контроллера 11 в первую позицию сигнал с выхода датчика 2 позиций запрещает дальнейшую работу блока 10 сброса позиций, который отключает блок 13. Автоматический контроллер 11 остается в этом случае 3 первой позиции. Аналогично происходит работа указанных блоков при любом сбросе позиций автоматического контроллера 3 машинистом с помощью ручного контроллера 2.
Таким образом, если после передачи -команд «автоматический пуск или сброс позиций автоматического контроллера с головного локомотива на дополнительный, контроллеры на локомотивах приходят в разные позиции, то автоматический контроллер 11 на дополнительном локомотиве всегда доводится до позиции, соответствующей позиции автоматического Контроллера 3 головного локомотива.
Формула изобретения
Устройство для синхронизации управления локомотивами, состоящее из командного поста, установленного на головном локомотиве и содержащего блок управления, ручной и автоматический контроллеры и приемопередатчик, и связанного с ним через линию связи исполнительного поста, установленного на дополнительном локомотиве, содержащего приемопередатчик, соединенный с другим блоком управления, другой автоматический контроллер и блок переключения позиций, отличающееся тем, что, с целью повышения надежности устройства в работе, исполнительный пост снабжен блоками набора и сброса позиций автоматического контроллера и датчиком позиций, вход которого подключен через автоматический контроллер и блок переключения позиции к выходам этих блоков, а его выход присоединен к одним из входов блоков наборов и сброса, другие входы которых подключены к блоку управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ГОРОЧНОЙ АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ С ИСПОЛЬЗОВАНИЕМ РАДИОКАНАЛА (ГАЛС Р) | 2005 |
|
RU2303542C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ МАНЕВРОВЫМ ЛОКОМОТИВОМ | 2020 |
|
RU2732266C1 |
| Устройство для управления локомотивами соединенных поездов | 1986 |
|
SU1437265A1 |
| Устройство для управления локомотивами сдвоенных поездов | 1987 |
|
SU1477582A1 |
| БОРТОВАЯ АППАРАТУРА АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ | 2007 |
|
RU2341396C1 |
| СИСТЕМА МАНЕВРОВОЙ АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ (МАЛС) | 2008 |
|
RU2369509C1 |
| АВТОМАТИЧЕСКАЯ СИСТЕМА ПРИНУДИТЕЛЬНОЙ ОСТАНОВКИ МАНЕВРОВОГО ЛОКОМОТИВА ПРИ ПРОВЕДЕНИИ МАНЕВРОВ НА ТУПИКОВЫХ ПУТЯХ СТАНЦИЙ | 2010 |
|
RU2436698C2 |
| СПОСОБ ТОРМОЖЕНИЯ ЛОКОМОТИВА И КРАН ВСПОМОГАТЕЛЬНОГО ТОРМОЗА ЛОКОМОТИВА | 2010 |
|
RU2444453C1 |
| МНОГОУРОВНЕВАЯ СИСТЕМА УПРАВЛЕНИЯ И ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ПОЕЗДОВ ДЛЯ СОРТИРОВОЧНЫХ СТАНЦИЙ | 2009 |
|
RU2401217C1 |
| Система управления маневровыми локомотивами | 2016 |
|
RU2622524C1 |