1
Изобретение отноентся к области авиационной техники и предназначено для проведения летных неслелДований на летательных объектах, работ на тренажерах и пилотажных стендах, тренировки и проверки техники пилотировання летного состава.
Известно устройство для имитации видимости в сложных метеусловиях, содержащее установленные на горизонтальной оси источник света, теплофильтр, диапозитив, трехкомиоиентный механизм привода диапозитива, следящие приводы, соединенные с датчиками параметров движения самолета и генератором белого шума, а на вертикальной оси расположены визир с коллиматорной линзой, полупрозрачным экраном и зеркалом, установленными нод углом 45° к обеим осям, и фотометрический блок с фоторезисторами.
Недостатком известного устройства является невозможность воспроизведения полета в любых сложных метеоусловиях, например в сумерках и ночью, в диапазоне до порога чувствительности глаза по контрасту и, кроме того, отсутствие имитации геометрической перспективы изображения.
Цель изобретения - повышение точности воспроизведения видимости в широком диапазоне сложных метеоусловий.
Это достигается тем, что в предлагаемое устройство между зеркалом и диапозитивом
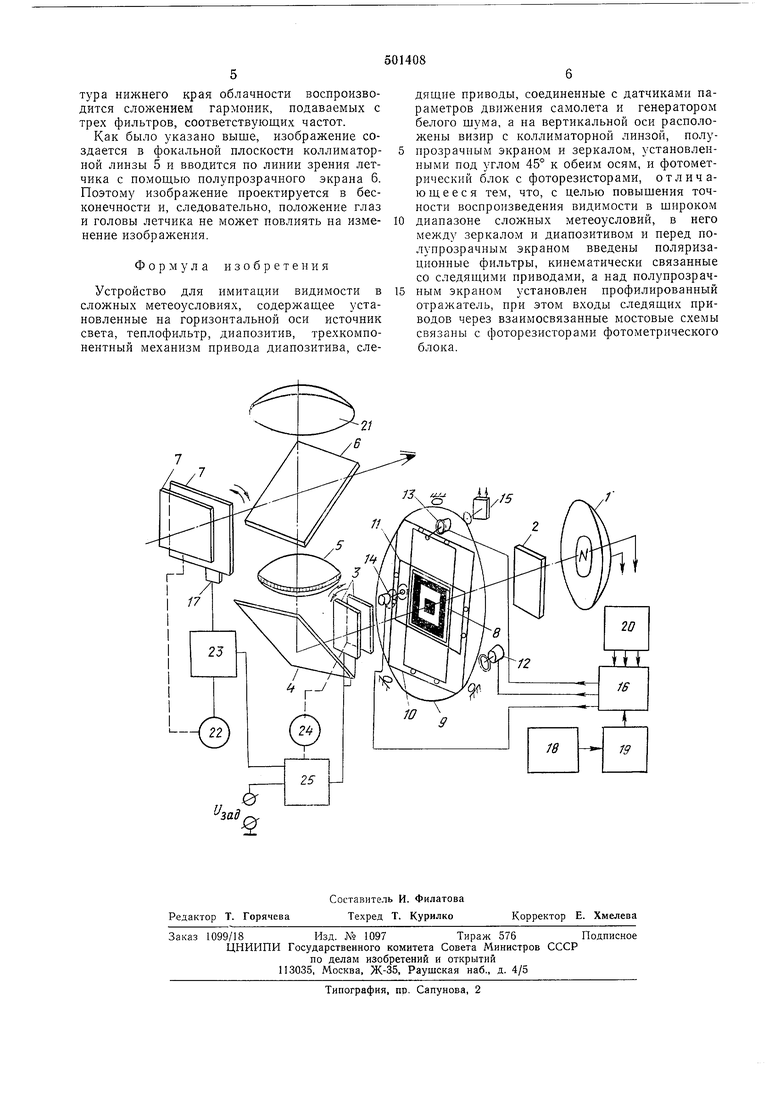
и перед полупрозрачным экраном введены поляризационные фильтры, кинематически связанные со следящими приводами, а над полупрозрачным экраном установлен профилированный отражатель, при этом входы следящих приводов через взаимосвязанные мостовые схемы связаны с фоторезисторами фотометрического блока. На чертеже представлена схема предлагаемого устройства.
Оно состоит из оптического блока, включающего источник 1 света, теплофильтр 2, сложный светофильтр 3, зеркало 4, коллиматорную линзу 5, полупрозрачный экран 6, фильтр 7 и диапозитив 8, трехстепенной каретки с вращающимся диском 9 по крену, перемещающейся по курсу рамки 10, двил-:ущейся по тангажу и высоте рамки 11,
следящих приводов 12-14 крена, тангажа и курса синусно-косинусных потенциометров 15, блока 16 управления, фоторезисторов 17 для установки заданного светового потока, генератора 18 белого шума, электрических
фильтров 19, датчиков 20 параметров движения самолета, профилированного отражателя 21, следящей передачи 22 с взаимосвязанной мостовой схемой 23, сложного фильтра 7, следящего, привода 24 с мостовой схемой 25 и
сложного фильтра 3. Для выравнивания света от источника 1 и наружной освещенности служат два фоторезнстора 17, включенные соответственно в мостовые взаимосвязанные схемы 23 и 25. Схемой 25 задается желаемая освещенность в условиях полета от ночной видимости до сумерек. В оба плеча взаимосвязанной мостовой схемы 23 включены фоторезисторы 17, причем один фоторезистор схемы 25 (после отработки его сигналов по заданному напряжению бзад) является датчиком для второго фоторезистора мостовой схемы 23. Схема 23 отрабатывает угол поляризатора в согласованное положение, соответствующее выравниванию наружной Освещенности с освещенностью, созданной схемой 25. Для усиления перспективы изображения в щироком диапазоне метеоусловий на оптической оси полупрозрачного экрана 6 сверху смонтирован профилированный отражатель 21, создающий псевдостереоэффект изображения. Введение между зеркалом и диапозитивом 8 и перед полупрозрачным экраном 6 поляризационных фильтров 3 и 7, кинематически связанных со следящими приводами 12, 13 и 14, входы которых посредством взаимосвязанных мостовых схем 23 и 25 соединены с фоторезисторами 17, и установка на оси коллиматорной линзы профилированного отражателя 21 позволяют достичь нового эффекта. Способность оценивать глубинное смещение объектов относительно .друг друга определяется величиной разности параллактических углов, глаз. Разность параллактических углов, соответствующая минимальному расстоянию между объектами, при котором они кажутся смещенными друг относительно друга по глубине, соответствует порогу глубинного зрения, величина которого в больщой степени зависит от контраста объектов по отнощению к фону и друг другу. Введение профилированного отражателя 21 и достил еиие посредством него псевдостереоэффекта позволяет оттенить перспективу изображения и увеличить угол зрения три одновременном увеличении глубины зрения. Поляризационные фильтры 7, обеспечивающие очень узкую (в несколько ангстрем) полосу пропускания, служат не только для изменения освещенности изображения, но и для увеличения контраста изображения при вариациях освещенности внекабинного пространства. Поляризациоиные фильтры 7 не пропускают 1переотраженных лучей внутри оптического тракта от линзы к диапозитиву и обратно, от линзы к экрану, от экрана к профилированному отражателю, что увеличивает контраст изображения системы. Введение профилированного отражателя и достижение посредством него псевдостереоэффёкта позволяет оттенить геометрическую перспективу изображения и увеличить угол зрения лри одновременном увеличении величины порога глубинного зрения, получаемого за счет исключения с помощью поляризаторов переотраженных лучей. Устройство работает следующим образом. На пути лучей, идущих от источника 1 света через теплофильтр 2, сложный фильтр 3 и зеркало 4 в коллиматорную линзу 5, устанавливается диапозитив 8, соверщающий плоское трехкомпонентное движение, на котором нанесены постепенные градации плотности почернения. Диапозитив устанавливается в двух взаимно перпендикулярных рамках 10 и 11, движущихся по направляющим, расположенным на вращающемся диске 9. Сигналы на следующие приводы 12, 13 и 14 поступают из датчиков 20 тангажа, курса и крена на тренажере-с вычислительной машины. Движение самолета по крену моделируется в натуральном масштабе поворотом каретки с диапозитивом относительно собственной оси. Тангаж, движение по высоте и курс воспроизводятся одновременными поступательными перемещениями рамок 10 и 11 с диапозитивом на этой каретке. Движение по таягажу, напри.мер, при выходе из облаков при любом угле крена всегда представляется летчику, смотрящему вдаль по горизонтальной оси самолета, как вертикальное перемещение накрененной земли и облаков. Такое же движение получается и при движении по курсу. Для обеспечения горизонтального перемещения по курсу и вертикального по тангажу при любом угле крена необходимо выполнить преобразование координат с помощью синусно-косинусных потенциометров 15. Переход от максимальной плотности почернения к соверщенной прозрачности осуществляется, например, по линейному закону. Для обеспечения работы удобнее использовать композиции, несущие несколько вертикальных и горизонтальных линий максимальной плотности. Имитация видимости в условиях облачности различной структуры осуществляется подачей сигналов с генератора белого шума, пропущенных через систему сформированных электрических фильтров 19 с различной полосой пропускания. Сигналы, идущие с фильтров 19, поступают на входы следящих приводов 13 и 14, привоящих продольную и поперечную рамки 10 и 11трехстепенной каретки. На вход усилителя ледящего привода 13, перемещающего рамку 10 по вертикали, поступают, кроме указаных сигналов с фильтров, сигналы высоты и ангажа. На вход следящего привода 14 переещения рамки 11 ио горизонтали подаются казанные сигналы с электрических фильров, и слагаемые сигналов курса (рыскаия). Сигналы крена идут на следящий привод 12для вращения диска 9 каретки. Выбор вида имитируемой облачности осуествляется переключением сигналов, идуих с фильтров, например трехслойная струк
| название | год | авторы | номер документа |
|---|---|---|---|
| КОРАБЕЛЬНАЯ ОПТИЧЕСКАЯ СИСТЕМА ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1993 |
|
RU2083443C1 |
| МОДЕЛЬ ОСВЕТИТЕЛЬНОЙ СИСТЕМЫ АЭРОДРОМА ДЛЯ ОБУЧЕНИЯ ПОСАДКЕ | 1992 |
|
RU2042981C1 |
| Стенд для имитирования управляемости продольного и бокового движения самолета | 1960 |
|
SU133355A1 |
| Оптический имитатор визуальной обстановки | 1975 |
|
SU636661A1 |
| ИМИТАТОР ВИДИМОСТИ В СЛОЖНЫХ МЕТЕОРОЛОГИЧЕСКИХ УСЛОВИЯХ | 1991 |
|
RU2056646C1 |
| УСТРОЙСТВО для ИМИТАЦИИ видимостив сложных | 1970 |
|
SU268191A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТОРМОЗНЫМ КРЮКОМ ЛЕТАТЕЛЬНОГО АППАРАТА | 1993 |
|
RU2067951C1 |
| Профилешлифовальный станок | 1988 |
|
SU1773689A1 |
| СИСТЕМА АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ ТОРМОЗНЫМ КРЮКОМ И ДВИГАТЕЛЕМ ПРИ ПОСАДКЕ ЛЕТАТЕЛЬНОГО АППАРАТА НА ПАЛУБУ КОРАБЛЯ | 1996 |
|
RU2119440C1 |
| Перспектограф | 1971 |
|
SU559842A1 |
