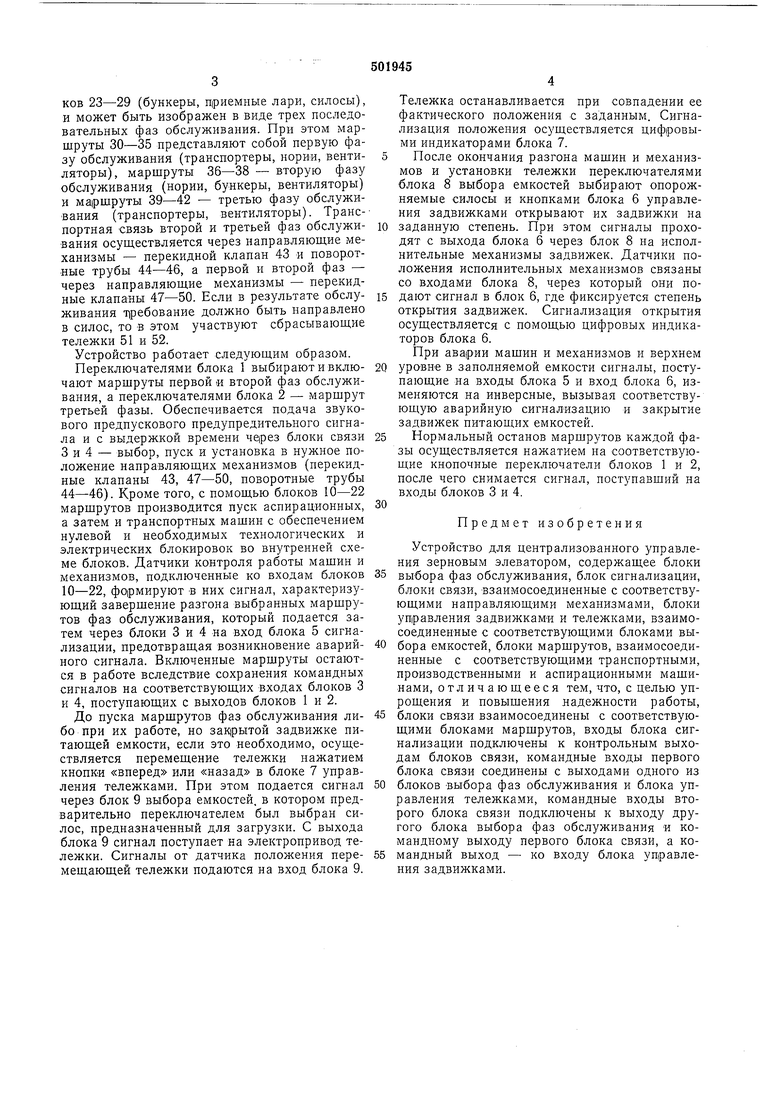
ков 23-29 (бункеры, приемные лари, силосы), и может быть изображен в виде трех последовательных фаз обслуживания. При этом маршруты 30-35 представляют собой первую фазу обслуживания (транспортеры, нории, вентиляторы), маршруты 36-38 - вторую фазу обслуживания (нории, бункеры, вентиляторы) и маршруты 39-42 - третью фазу обслуживания (транспортеры, вентиляторы). Транспортная связь второй и третьей фаз обслуживания осуш.ествляется через направляюш,ие механизмы - перекидной клапан 43 и повор отные трубы 44-46, а первой и второй фаз - через направляющие механизмы - перекидные клапаны 47-50. Если в результате обслуживания Т|ребование должно быть направлено в силос, то в этом участвуют сбрасываюш,ие тележки 51 и 52.
Устройство работает следуюш,им образом.
Переключателями блока 1 выбирают и включают маршруты первой и второй фаз обслуживания, а переключателями блока 2 - маршрут третьей фазы. Обеспечивается подача звукового предпускового предупредительного сигнала и с выдержкой времени че|рез блоки связи 3 и 4 - выбор, пуск и установка в нужное положение направляюш,их механизмов (перекидные клапаны 43, 47-50, поворотные трубы 44-46). Кроме того, с помошью блоков 10-22 маршрутов производится пуск аспирационных, а затем и транспортных машин с обеспечением нулевой и необходимых технологических и электрических блокировок во внутренней схеме блоков. Датчики контроля работы машин и механизмов, подключенные ко входам блоков 10-22, формируют в них сигнал, характеризуюш,ий завершение разгона выбранных маршрутов фаз обслуживания, который подается затем через блоки 3 и 4 на вход блока 5 сигнализации, предотвраш,ая возникновение аварийного сигнала. Включенные маршруты остаются в работе вследствие сохранения командных сигналов на соответствуюших входах блоков 3 и 4, поступающих с выходов блоков 1 и 2.
До пуска маршрутов фаз обслуживания либо при их работе, но зак|рытой задвижке питающей емкости, если это необходимо, осуществляется перемещение тележки нажатием кнопки «вперед или «назад в блоке 7 управления тележками. При этом подается сигнал через блок 9 выбора емкостей, в котором предварительно переключателем был выбран силос, предназначенный для загрузки. С выхода блока 9 сигнал поступает на электропривод тележки. Сигналы от датчика положения перемещающей тележки подаются на вход блока 9.
Тележка останавливается при совпадении ее фактического положения с заданным. Сигнализация положения осуществляется циф ровыми индикаторами блока 7.
После окончания разгона машин и механизмов и установки тележки переключателями блока 8 выбора емкостей выбирают опорожняемые силосы и кнопками блока 6 управления задвижками открывают их задвижки на
заданную степень. При этом сигналы проходят с выхода блока 6 через блок 8 на исполнительные механизмы задвижек. Датчики положения исполнительных механизмов связаны со входами блока 8, через который они подают сигнал в блок 6, где фиксируется степень открытия задвижек. Сигнализация открытия осуществляется с помощью цифровых индикаторов блока 6. При аварии мащин и механизмов и верхнем
уровне в заполняемой емкости сигналы, поступающие на входы блока 5 и вход блока 6, изменяются на инверсные, вызывая соответствующую аварийную сигнализацию и закрытие задвижек питающих емкостей.
Пормальный останов маршрутов каждой фазы осуществляется нажатием на соответствующие кнопочные переключатели блоков 1 и 2, после чего снимается сигнал, поступавший на входы блоков 3 и 4.
Предмет изобретения
Устройство для централизованного управления зерновым элеватором, содержащее блоки
выбора фаз обслуживания, блок сигнализации, блоки связи, взаимосоединенные с соответствующими направляющими механизмами, блоки управления задвижками и тележками, взаимосоединенные с соответствующими блоками выбора емкостей, блоки маршрутов, взаимосоединенные с соответствующими транспортными, производственными и аспирационными мащинами, отличающееся тем, что, с целью упрощения и повыщения надежности работы,
блоки связи взаимосоединены с соответствующими блоками марщрутов, входы блока сигнализации подключены к контрольным выходам блоков связи, командные входы первого блока связи соединены с выходами одного из
блоков выбора фаз обслуживания и блока управления тележками, командные входы второго блока связи подключены к выходу другого блока выбора фаз обслуживания и командному выходу первого блока связи, а командный выход - ко входу блока управления задвижками.
23 24 25 26 27 28 29
30 J 32 33 34 35
СРиг I
Фиг. 2
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для УПРАВЛЕНИЯ ПОТОЧНО-ТРАНСПОРТНОЙСИСТЕМОЙ | 1970 |
|
SU279429A1 |
| Устройство для централизованного управления зерновым элеватором | 1980 |
|
SU938825A1 |
| Способ управления подачей сыпучего материала на норию | 1985 |
|
SU1285442A1 |
| Комплекс для послеуборочной обработки и хранения зернового материала | 2019 |
|
RU2730185C1 |
| Способ автоматического управления аспирационной установкой | 1986 |
|
SU1366245A1 |
| Автоматизированная оросительная система | 1982 |
|
SU1136769A1 |
| Устройство для сигнализации | 1983 |
|
SU1161976A1 |
| Устройство контроля заполнения силосов элеватора | 1973 |
|
SU662809A1 |
| Устройство для управления на расстоянии клапанами или шиберами элеватора | 1933 |
|
SU37167A1 |
| Система управления загрузкой силосов элеватора | 1988 |
|
SU1639486A1 |


