Известны системы автоматизированного управления на релейно-контактной аппаратуре, предназначенные для поточно-транспортных комнлексов определенных типов зерновых элеваторов. Такие системы представляют собой группы схемно-конструктивных блоков, объединенных электрическими связями и обеспечивающих централизованное управление из диспетчерского пункта всеми транспортными операциями предприятия. Существенным недостатком известных систем является отсутствие функциональных при.знаков у блоков, в связи с чем функциональцые свойства система приобретает после выполнения внещних электрических связей блоками согласно проекту для каждого конкретного поточно-транспортного ;ко шлекса. Известные системы пригодны только для определенных типов поточно-транспортных комплексов, причем увеличивается количество внещних связей, т. е. кабельной продукции между блоками, и усложняется структура электрических схем, затрудняя обслуживание и ПОИСК неисправностей. Кроме того, в этом случае подавляющий объем электромонтажных выполняется на объекте управления. бодного от неречисленных недостатков и могущего применяемого для типовых и нетиповых поточно-транспортных комплексов хлебозаготовительных предприятий (элеваторов, поточных линий и др.). Это достигается тем, что в устройстве блоки управления первыми исполнительными механизмами, определяющими направления движения, подключены к блоку выбора марщрутов, связанному с блоками управления последними исполнительными механизмами направления движения и с блоками управления марщрутом и контроля работы механизмов, причем блок управления маршрутом соедине} с блоком выбора положения задвил ек и тележек, связанным с датчиками положения, с блоками унравления механизмами длительного и кратковременного действия и с блоком аварийной сигнализации, соединенным с блоком контроля работы механизмов. В предлагаемом устройстве управление всеми механизмами различных поточно-транснортных комплексов осуществляется двумя типами блоков, количество которых определяется числом механизмов, а общие узлы управления марщрутами, аварийной и предупредительной сигнализации располагаются в пяти блоках. В зависимости от типа и особенностей хлебозаготовительного предприятия -изменяется только количество универсальных блоков.
Применение уннверсальных блоков позволяет организовать их серийное нронзводство и выполнять значительный объем монтажных работ .на заводе-изготовителе.
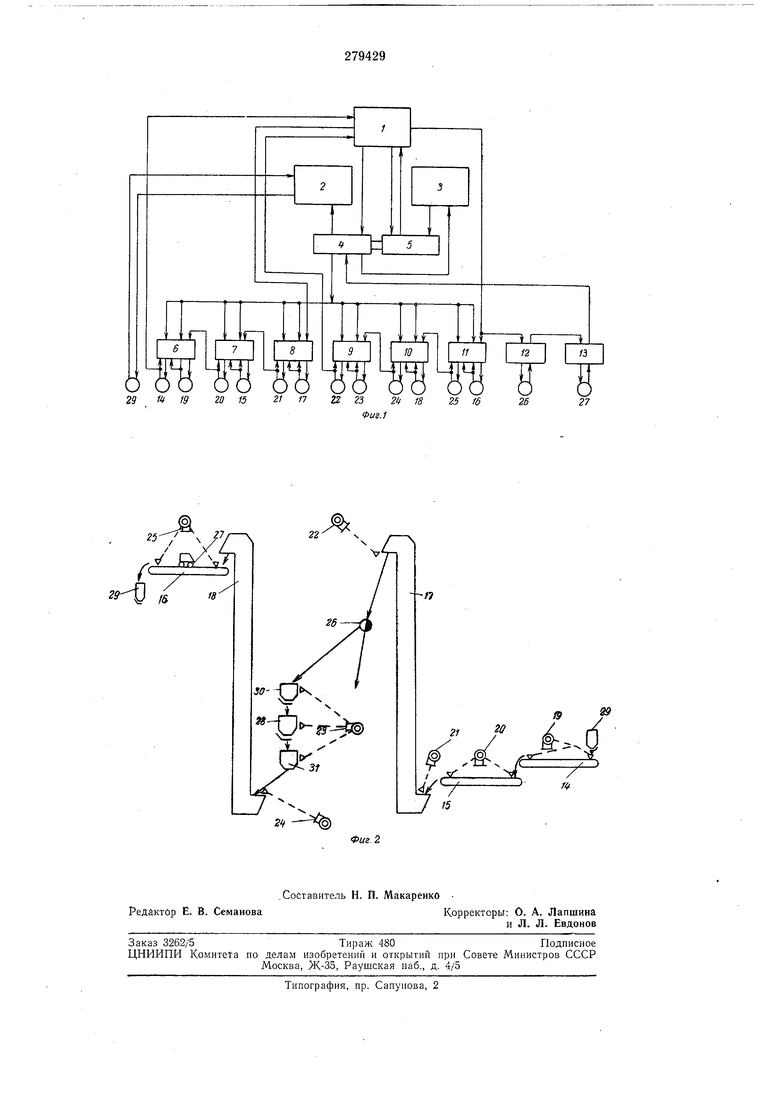
На фиг. 1 изображена блок-схема онисываемого устройства; на фиг. 2 - технологическая схема участка иоточно-транспортной системы хлебозаготовительного предприятия.
Предлагаемое устройство состоит из блока
1с многопозиционными переключателями и кнопками выбора и пуСка маршрутов, блока
2с многонозиционными переключателями выбора задвижек и положения разгрузочных тележек, блока 3 аварийной сигнализации с табло аварийной световой сигнализации и незапуска механизмов и кнопкой отключения сигнализации пневмосхемы, блоков 4 « 5 управления маршрутами и контроля работы механизмов, блоков 5-11 управления механизлМами длительного действия и блоков 12 и 13 управления механизмами кратковременного действия.
Блоки 4-13 состоят из наборов -бесконтактных транзисторных логических элементов серии «ЛОГИКА-Т.
Блоки 6-11 имеют одинаковые электрические схемы и предназначены для управления различными транспортными, технологическими и аспирационными механизмами. Блоки 12 и 13 также имеют идентичные схемы и предназначены для управления различными направляющими механизмами («лапанами, шиберами, разгрузочными тележками и т. д.).
Участок поточно-транспортной системы содержит механизмы длительного действия - транспортеры 14-16, нории 17 и 18, вентиляторы аспирации 19-25, а также механизмы кратковременного действия - клапан 26 и разгрузочную тележку 27.
На участке установлены автоматические весы 28 для взвешивания транспортируемого продукта. Участок имеет граничные 29 и промежуточные 30 и 31 емкости.
Работа устройства заключается в следующем.
Переключателями блока / задаются -начальный и конечный механизмы, а переключателями блока 2 - положение -разгрузочной тележки и исполнительный механизм подъемкостной задвилски. Затем нажатием в блоке / кнопки «Пуск подается сигнал в блок 5, который включает предупредительную поэтажную сигнализацию и с выдержкой времени через блоки /, 12 и 13 подает команду на установку механизмов кратковременного действия (клапана 26 и разгрузочной тележки 27) в заданное положение. Когда механизмы займут эти положения, с выхода блока J2 будет подан сигнал в блок 13, а с выхода последнего - в блок 4. Этот сигнал используется для выработки в блоке 4 выходного импульсного сигнала, обеспечивающего последовательный пуск через блоки //-6 механизмов 16, 18, 1/, 15, 14 и 25-19.
После разгона последнего по пуску механизма 14 длительного действия его сигнал от датчика скорости иодается в блоки 5 и / и далее - в блок 4, что приводит к снятию импульсного сигнала. Механизмы участка остаются в работе за счет постоянного наличия командных сигналов, поступающих из блока /
в блоки 11 и 8 иервых по иуску механизмов полумаршрутов (под полумаршрутом следует понимать части транспортного участка от механизма 14 до емкости 30 и от емкости 31 до механизма 27).
При изменениях в ходе технологического процесса (верхний уровень в заполняемой емкости и т. д.) или аварии механизмов включаются блоки 3 н 5, что приводит соответственно к включению аварийной сигнализации и
закрытию питающей задвижки или к останову всех механизмов марщрута.
Технологический останов маршрута осуществляется нажатием в блоке 1 кнопки «Стоп, при этом сигнал подается в блоки 5, 4 н 2. С
выхода блока 2 подается сигнал на закрытие задвижек, а с выдержкой времени снимаются командные сигналы с входохМ блоков 8 и 11, и происходит последовательный останов механизхмов 25, 23, 16, 18, 22, 24, а также механизмов 15, 17, 19, 21, 14 и 20.
Для управления транспортными маршрутами других участков комплекса необходимо переключатели в блоках и 2 установить соответственно в другие положения и нажать в
блоке 1 кнопку «Пуск, при этом управление механизмами будет осуществляться аналогично описанному.
Предмет изобретения
40
Устройство для управления поточно-транспортной системой, содержащее блок выбора маршрутов, блок выбора положения задвижек и тележек, блок аварийной сигнализации,
блок управления маршрутом и блок контроля работы механизмов и блоки управления исполнительиыми механизмами длительного и кратковременного действия, отличающееся тем, что, с целью повышения надежности работы устройства, -в нем блоки управления первыми исполнительными механизмами, определяющими направления движения, подключены к блоку выбора маршрутов, связанному с блоками управления последними исполнительныМИ механизмами направления движения и с блоками управления маршрутом и контроля работы механизмов, причем блок управления маршрутом соединеп с блоком выбора положения задвижек и тележек, связанным с датчиками положения, с блоками управления механизмами длительного и кратковременного действия и с блоком аварийной сигнализации, соединенным с блоком контроля работы механизмов.
29 « fff ZO 15 Z/ n 22 23 2ij 18 25 1626
27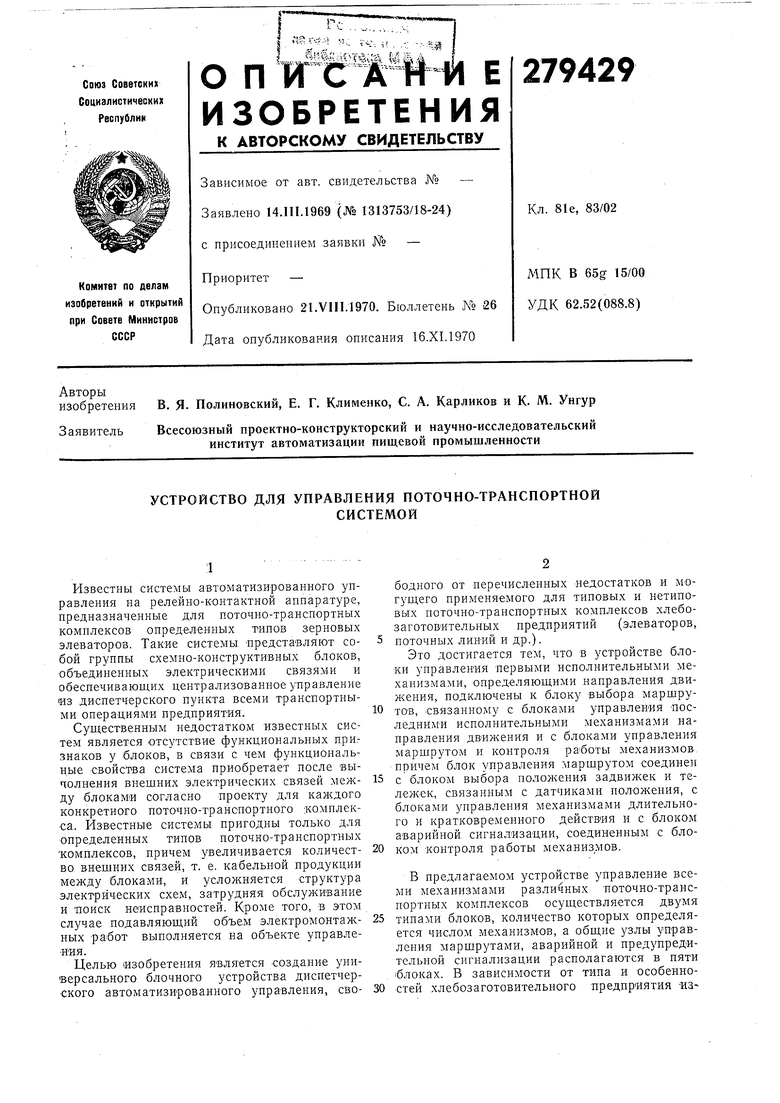
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для централизованного управления зерновым элеватором | 1972 |
|
SU501945A1 |
| Устройство для централизованного управления зерновым элеватором | 1980 |
|
SU938825A1 |
| Устройство дистанционного автоматизированного управления шахтными разветвленными конвейерными линиями | 1974 |
|
SU700661A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТРАНСПОРТНЫМ ПОТОКОМ СЫРЬЕВЫХ КОМПОНЕНТОВ СТЕКОЛЬНОЙ ШИХТЫ | 1991 |
|
RU2026806C1 |
| Устройство для дистанционного управления транспортным комплексом | 1974 |
|
SU553712A1 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ СБРАСЫВАЮЩЕЙ ТЕЛЕЖКОЙ ТРАНСПОРТЕРА | 1970 |
|
SU261252A1 |
| УСТРОЙСТВО для ИСКРОБЕЗОПАСНОГО УПРАВЛЕНИЯ КОНВЕЙЕРОМ РАЗВЕТВЛЕННОЙ КОНВЕЙЕРНОЙ ЛИНИИ | 1969 |
|
SU248038A1 |
| Устройство для автоматической загрузки материала в бункера | 1979 |
|
SU889577A1 |
| Устройство для сигнализации о состоянии механизмов | 1990 |
|
SU1800471A1 |
| Устройство программного управления автооператорами гальванической линии | 1981 |
|
SU969794A1 |