(54) СЛЕДЯЩАЯ СИСТЕЛ А
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1975 |
|
SU532848A1 |
| СЛЕДЯЩАЯ СИСТЕМАВСЕСОЮЗНАЯ | 1972 |
|
SU331365A1 |
| Следящая система | 1978 |
|
SU752224A1 |
| Устройство для измерения магнитного курса | 1978 |
|
SU769329A1 |
| Устройство для управления реверсив-НыМ ВЕНТильНыМ элЕКТРОпРиВОдОМ | 1979 |
|
SU817954A1 |
| Следящая система | 1974 |
|
SU549784A1 |
| Реверсивный электропривод | 1988 |
|
SU1667213A1 |
| Электропривод для подъемной машины | 1983 |
|
SU1159138A1 |
| Следящая система | 1973 |
|
SU438983A1 |
| Цифровая следящая система | 1977 |
|
SU723508A1 |
Изобретение относится к системам управления и .может быть использовано для двухканального управления с применением в качестве исполнительных элементов двухфазных аюинхронлых двигателей и двигателей постоянного тока.
Функциональные схемы известных устройств двухКаНального упра1вления содержат измерительно-преобразовательный блок, связанный через блок коррекции со входами реверсивного «омларатора и блока определения модулей, выход которого подключен через нереверсивный усилитель мощности к обмотке управления двигателя, связанного через объект регулирования с одним из входов измерительно-преобразовательного блока, и реверсивный усилитель мощности, выход которого подключен к обмотке возбуждения двигателя, а входы - к реверсивному компаратору.
Недостатком таких устройств является трудность вьшолнения регулировочными средствами, iBO всем рабочем диапазоне темлератур, условия равенства зоны нечувствительности характеристики управления нереверсивного канала 1И ширины петли гистерезиса с зоной нечувствительносри характеристики управления реверсивного капала:
л - л 1- 9Л
.H К.р f
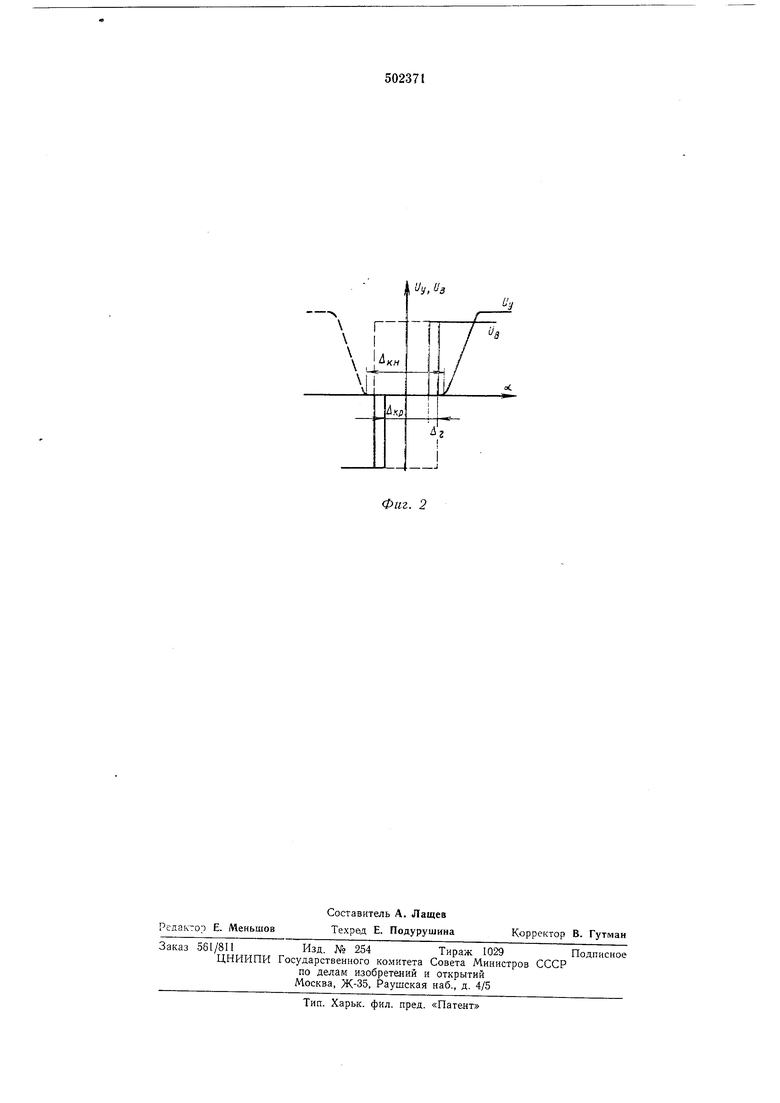
где АК.И и Д ,;.р - зоны нечу.зств.ительности нереверсивного и реверсивного каналов; Д г - ширина петли гистерезиса реверсивного канала.
Неодноз ачность начала характеристик управления обоих каналов обуславливает автоколебания при малых сигналах рассогласования и снижение точности подОбных систем. Кроме того, в зоне нечувствительности системы, определяемой зоной нечувствительности нереверсивного канала, на участках неоднозначности характеристик обмотка возбуждения не отключается от источника -питания, поэтому работа системы на этом участке характеризуется дополнительным потреблением энергии и, как следствие, нагревом двигателя и оконечного каскада усилителя. Это снижает экономичность и надежность подобных систем.
Целью изобретения является повышение экономичности и надежности следящих систем И .повышение ,их точности.
Сущность изобретения заключается в том, что дополнительно устанавливаются последовательно соединенные комларатор, вход которого связан с выходом блока определения модуля, и логический элемент «И, один .из входов которого подключен к выходу реверсиВного компаратора, а выход логического элемента «И соединен с реверсивным усилителем мощности.
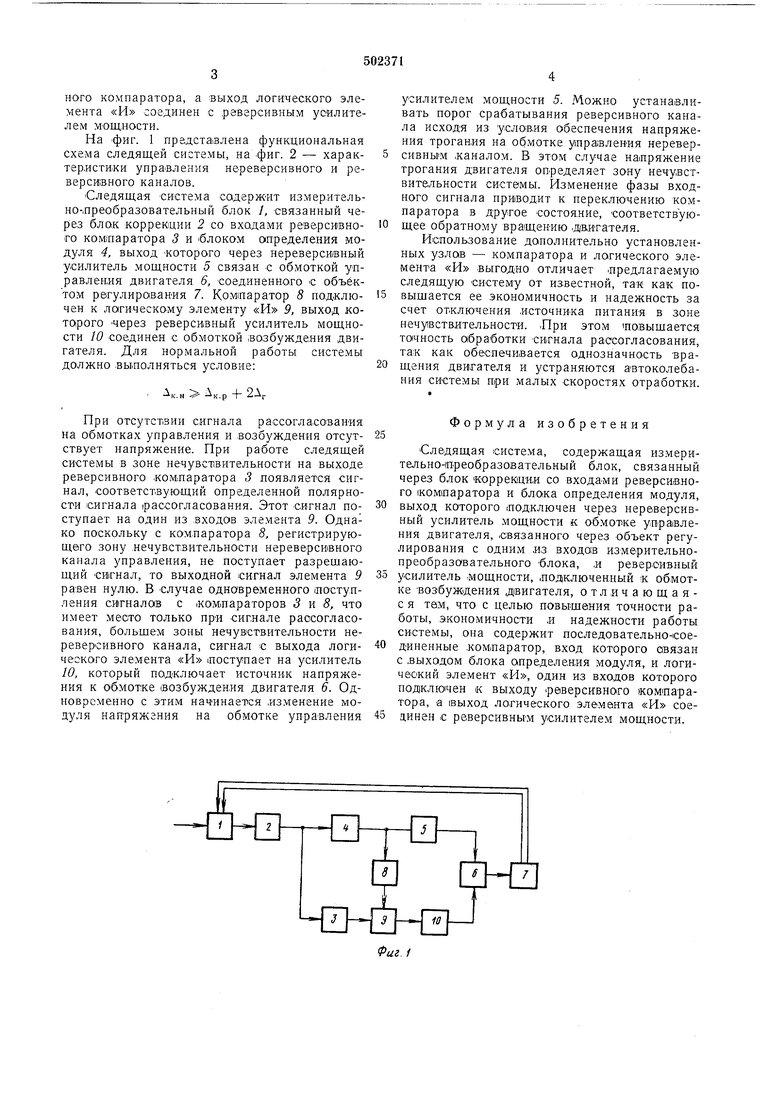
На -фиг. 1 представлена функциональная схема следящей системы, на -фиг. 2 - характер.исти,ки управления нереверсивного и реверсивного каналов.
Следящая система содержат измер.ительно-преобразовательный блок /, связанный через блок коррекции 2 со входами реверсивного комиаратора 3 и блоком определения модуля 4, вы.ход -которого через нереверсивный усилитель мощности 5 связан с обмоткой управления двигателя 6, соединенного с объектом регулирования 7. Комшаратор 8 подключен к логическому элементу «И 9, выход которого через реверсивный усилитель мощности 10 соединен с обмоткой возбуждения двигателя. Для нормальной работы системы должно вьшолняться условие:
.н к.р i
При отсутствии сигнала рассогласования на обмотках управления и .возбуждения отсутствует напряжение. При работе следящей системы в зоне нечувствительности на выходе реверсивного комларатора 3 появляется сигнал, соответствующий определенной полярности сигнала (рассогласования. Этот сигнал поступает на один из входов элемента 9. Однако поскольку с компаратора 8, регистрирующего зону .нечувствительности нереверсивного канала управления, не поступает разрешающий сигнал, то выходной сигнал элемента 9 равен нулю. В -случае одновременного поступления сигналов с .комлараторов 3 тл. 8, что имеет место только при сигнале рассогласования, большем зоны нечувствительности нереверсивного канала, ситнал с выхода логического элемента «И поступает на усилитель 10, который подключает источник напряжения к обмотке возбуждения двигателя 6. Одновременно с этим начинается .изменение модуля напряжения на обмотке управления
усилителем мощности 5. Можно устанавливать порог срабатывания реверсивного канала исходя из обеспечения напряжения трогания на обмотке у|Пра;влен-ия нереверсивньгм .каналом. В этом случае напряжение трогания двигателя определяет зону нечувствительности системы. Изменение фазы входного сигнала при1вод.ит к переключению компаратора в другое состояние, соответствующее обратному вращен-ию двигателя.
Использование дополнительно установленных узлов - компаратора и логического элемента «И выгодно отличает предлагаемую следящую -систему от известной, так как повышается ее экономичность и надежность за счет отключения .источника питания в зоне нечувствительности. .При этом «повыщается томность обработки сигнала рассогласования, так как обеспечивается однозначность вращения двигателя и устраняются автоколебания системы при ма.лых скоростях отработки.
Формула изобретения
Следящая система, содержащая измерительно-преобразовательный блок, связанный через блок коррекции со входами реверсив.ного комюаратора и блока определения модуля, выход которого .подключен через нереверсивный усилитель мощности к обмотке управления двигателя, .связанного через -объект регулирования с одним .из входов из.ме-рительнопреобразовательного -блока, .и ревер-оивный усилитель мощности, .подключенный к обмотке возбуждения двигателя, отличающаяс я там, что с целью повышения точности работы, экономичности .и надежности работы системы, она содержит последовательно-соединенные .комларатор, вход которого связан с выходом блока определения модуля, и логический элемент «И, один из вхо.дов которого подклю1чен к выходу .реверсивного компаратора, а выход логического элемента «И соединен с реверсивны-м усилителем мощности.
I i/y, Us
%
Фиг. 2
