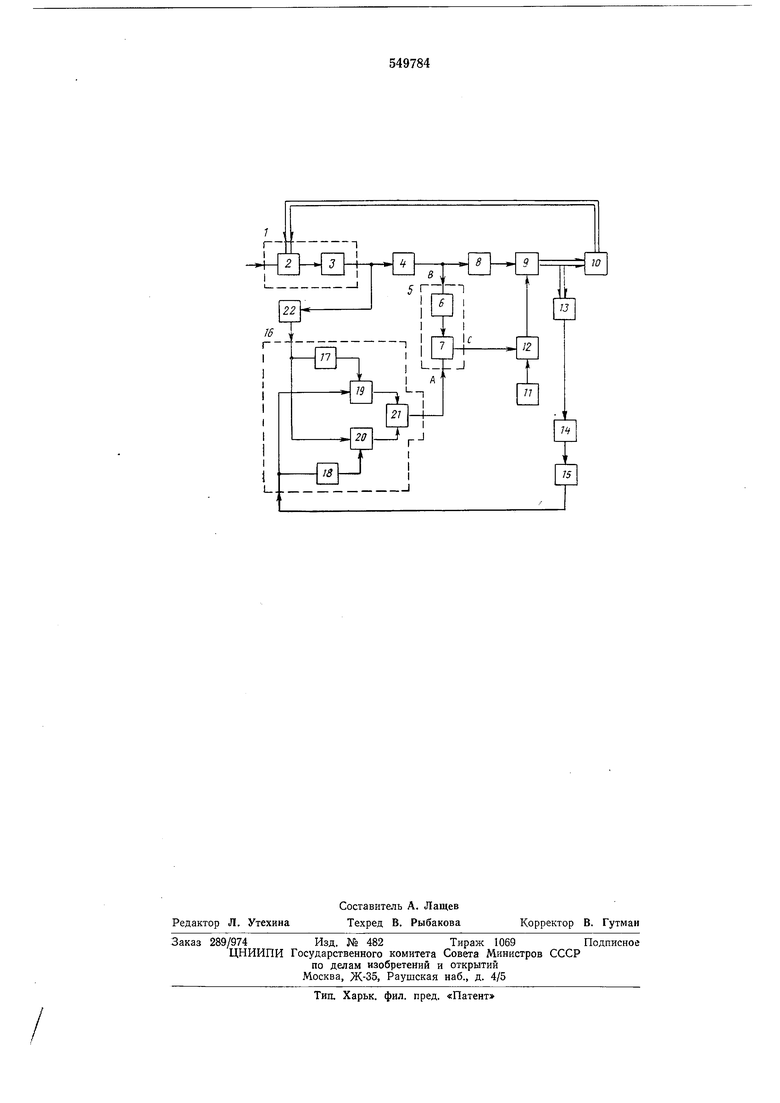
объектом регулирования 10. Система содержит также последовательно соединенные источник постоянного напряжения // и коммутатор 12, последовательно соединенные тахогенератор 13, демодулятор 14, второй компаратор 15 и элемент неравнозначности 16. Последний содержит пять логических элементов: два элемента НЕ 17 и 18 для получения инверсии, два элемента И 19 20 для образования произведения и один элемент ИЛИ 21 для получения суммы первого компаратора 22. Система работает следующим образом. Коммутатор 12 подключает источник постоянного напряжения к двигателю, если па выходе элемента запрета 5 появляется сигнал, соответствующий логическому высказыванию, равному елтнпиие. Сигнал па выходе С элемента запрета 5 равен единице, если на одном входе схемы сигнал А, соответствующий информации о скорости вращения двигателя и сигнале рассогласования системы, равен единице, а на другом входе (запрещающем) сигнал В, соответствующий информации о сигнале рассогласования (в импульсной форме), равен . Эта логическая операция характеризуется выражением В. Значения истиппостп запрета приведены в табл. 1. Таким образом, во всех случаях (кроме Л 1 и B Q) коммутатор 12 не подключает источник постоянного напряжения 11 к двигателю 9. Причем источник постоянного напряжения // может быть регулируемым в зависимости от сигнала рассогласования. Сигнал на выходе Л схемы неравнозначности (отрицание равнозначности) появляется в случае, когда имеется сигнал на одном из входов (сигнал, соответствующий информации о сигнале рассогласования) и не возникает, когда сигналы поступают на оба входа схемы или совсем отсутствуют. Согласно приведенному правилу работа схемы неравнозначности выражена динамической функциейA ab + ab Условия работы схемы неравнозначности представлены в табл. 2. Т. е. система позволяет получить неооходимый эффект: подключение источника постоянного напряжения 11 к двигателю 9 только в тормозном режиме, когда сигнал управления равен нулю, а скорость двигателя не равна нулю. Применение изобретения позволит значительно повысить динамические возможности п экономичность системы. Формула изобретения Следящая система, содержащая последовательно соединенные элемент сравнения, преобразователь «угол - напряжение, модулятор, усилитель мощности и двигатель, выход которого через объект управления соединен с одним из входов элемента сравнения, источник постоянного напряжения, подключенный через коммутатор к одному из входов двигателя, элемент запрета, первый вход которого соединен с выходом модулятора, а выход - с одним из входов коммутатора, отличающаяся тем, что, с целью повыщения быстродействия и экономичности системы, она содержит первый компаратор и последовательпо соединенные установленный на валу двигателя тахогенератор, демодулятор, второй компаратор и элемент неравнозначности, один вход которого соединен через первый компаратор с выходом преобразователя «угол-напряжение, а выход - со вторым входом элемента запрета. Источники информации, использованные при экспертизе: 1.Мейстель А. М. «Динамическое торможение приводов с асинхронными двигателями, М.-Л., «Энергия, 1967 г., стр. 121. 2.Бальбук В. В. и др. «Динамические свойства релейных п импульсных следящих электроприборов, М., «Энергия, 1972 г., стр. 221 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1979 |
|
SU873205A2 |
| Следящая система | 1975 |
|
SU545969A1 |
| Следящая система | 1979 |
|
SU849133A2 |
| Следящая система | 1974 |
|
SU502371A1 |
| Устройство для управления двухфазным асинхронным электродвигателем | 1983 |
|
SU1089747A1 |
| Следящая система | 1987 |
|
SU1439529A1 |
| Следящая система | 1981 |
|
SU962844A1 |
| Цифровая следящая система | 1979 |
|
SU890359A2 |
| Следящая система | 1981 |
|
SU999014A1 |
| Следящая система | 1979 |
|
SU862114A1 |