Изобретение относится к следящим системам переменного тока с ограниченной мощностью источника питания, предназначенным для стабилизации .и слежения.
Известны следующие системы с широтночастотным управлением (силгметричиое управленпе ассинхронным двухфаЗНьгм двигателем АДД), содержащие измерительный блок, выход которого через реверсивный блок управления соединен с обмоткой управления двигателя, а через выпрямитель сигнала - с формирователем импульсов нереверсивного блока управления, выход последнего подключен к обмотке возбуждения двигателя, а его второй вход через источник смещения подключен к одному выходу генератора импульсов нереверсивного блока упра-вления, второй выход которого соединен с выпрямителем сигнала.
Для того, чтобы оптимально согласовать двигатель с нагрузкой и расширить функциональные возможности следящей системы СС в части преобразоваиия механических, энергетических и регулировочных характеристик в зависимости от вида и изменения нагрузки изменяется степень эллиптичности электромагнитного поля двигателя. Изменение степени эллиптичности электромагнитного поля АДД осуществляется подключением обмотки управления ОУ к усилителю, характеристика
вход-выхода которого имеет пропорциональную зависимость, а обмотки возбуждения ОВ-к усилителю с релейио-пропорциональной характеристикой вход-выход и eняющeйся начальной амплитудой напряжения по обмотке возбуждения.
Если начальная величина напряжения по обмотке возбуждения ОВ равна нулю, то получаем случай симметричного управлен)1Я,
если же начальная величина напряжения по обмотке возбуждения максимальная-несимметричного управления.
Такое иодстраивание начально амплитуды напряжения по обмотке возбуждения
ведет к преобразован О механических характеристик, т. е. к изменению наклона механ ческих характеристик i, следовательно, дe пфирования. Это позволяет оптимально согласовывать характер11СТ ки двигателя с диаграммой нагрузки.
Кроме того, в СС с перестраиваемыми хара теристиками дв1 гателя относительно граИ чнь х хара стеристик сш метр чного и иеcим eтpичнoгo способов управления расширяются функциоиальиые возможности. Перестройка характеристик позволяет пспользовать данну О СС как многоцелеву О, т. .е. применять ее при законах управлен Я для различных объектов и нагрузок (в том
Предлагаемая следящая система с. таким управлением двигателем может служить примером комбинированного управления.
Для управлеиня двигателем используются два раздельиых канала. Сигнал рассогласования системы является управляющим для обоих каналов усилителей обмоток двигателя. Этот основиой сигнал управления в . канале ус лителя o6iMOTKH возбуждения ОВ су.имИруется с дополнительным сигналом, предназначенным для изл1еиеиия режима работы этого канала в зависимости от в-нда преобразования диаграммы нагрузки.
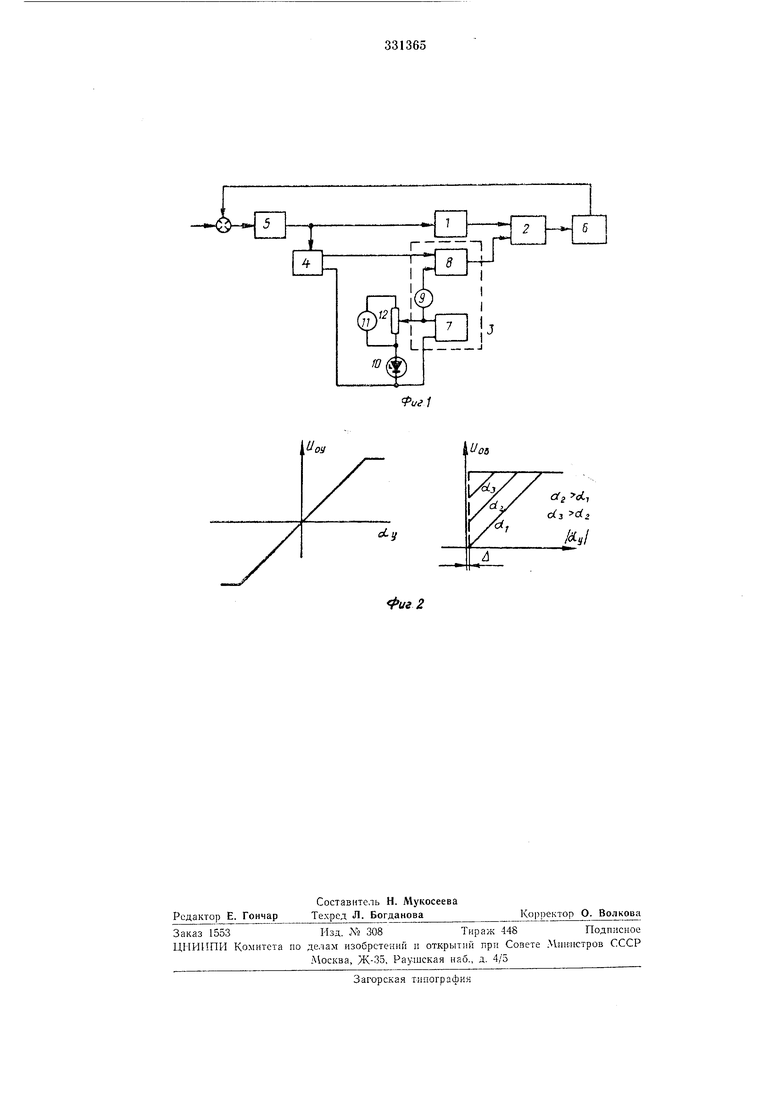
На фиг. 1 предлагаемая следящая система переменного тока с АДД; на фиг. 2-характеристики вход-выход усилителя но обоим каиалам Обмоток двигателя, где
- основной сигнал управления;
А - зона нечувствительности по облютке возбуждения;
«ь «2, Из - величины, характеризующие дополнительный сигнал;
ов- амнлнтуды наиряжений первых гармоник на обмотках двигателя ОУ }1 ОВ.
Оиа состоит из реверсивного блока управления /, к которому подключена обмотка управления двигателя 2, нереверсивного блока управления 3, с подключенной обмоткой возбуждения, выирямителя сигнала 4, измерительного блока 5 и объекта регулирования 6. Блоки управления включают в себя генератор пилообразного наиряжения 7 и формирователь импульсов 8 с источником смеще}И1Я 9. Формирователь импульсов содержит триггер Шмитта, ключевой усилитель с модулятором и усилитель мощности.
Параллельно выходным клеммам генератора пилообразного напряжения 7 в нереверсивном блоке управления дополнительно установлены диод-стабилитрон 10 и последовательно соединенные с ним параллельио-включениые источи-ик постоянного напряжеиия // л потенциометр 12.
При нулевом основном сигнале управления, поступаюи1,ем из измерительного блока 5, яезавнсимо от величииы доиолнительного сигнала, обмотки двигателя отключены от питающей сети. Величину дополнительного сигнала .можно регулировать потенииометрО М 12. При нулевом дополнительном сигнале и изменении основного сигнала получается пропорциональное управление асинхронным двухфазным двигателем по двум обмоткам (случай симметричного управления), а при изменении величины дополнительного сигнала поручаем по обмоткам АДД различное управление: по обмотке управления ОУ-ироиорциональное, а на обмотке возбуждения ОВ--релейно-пронорииональное. Начальная величина напряжения на обмотке возбуждения ОВ двигателя, проиорииональная дополиительиоЛ у сигналу, может изменяться от нуля (симметричное управление) до амплитудного значения напряжения насыщения усилителя (несимметричное управление, с.м. фиг. 1), т. е. подключение обмотки управления ОУ к усилителю, характеристика вход-выход которого
иропордиоиальна, а обмотки возбуждении ОВ к усилителю с релейно-лииейиой характеристикой вход-выход пр11водит к преобразованию характеристик двигателя.
Эти преобразования характеристик дают
возможность оптимально согласовывать характеристики двигателя с диаграммой иагрузки, а также примеиять эту следящую систему с фиксироваиной настройкой при различных закопах управления для разных объектов.
В предлагаемой СС принципиально невозможен самоход двигателя. Поэтому в качестве иснолнительных двигателей могут быть иснользованы двигатели с критическим скольжением близким к единице.
Пред м е т и з о б р е т е и и я
Следящая система иеременного тока, содержащая измерительный блок, выход которого через реверсивный блок управления соединен с обмоткой управления двигателя, а через выпрямитель сигнала - с формирователем импульсов нереверсивного блока управления, выход которого подключен к обмотке возбуждения двигателя, а второй вход формирователя имиульсов через источник смеи,ения подключен к первому выходу генератора пилообразного напряжения нереверсивного
блока управления, второй выход которого соединен с выпрямителем сигнала, отличающаяся тем, что, с целью расширения функциональных возможностей, в нее дополнительно 15ведены параллельно соединенные иотенциометр и источник постоянного напряжения, к общей точке которых подключен через стабилитрои второй выход генератора пилообраз юго напряжения нереверсивиого блока управления, первый выход которого подключе
к движку иотеиЦИОметра.
-HgM-I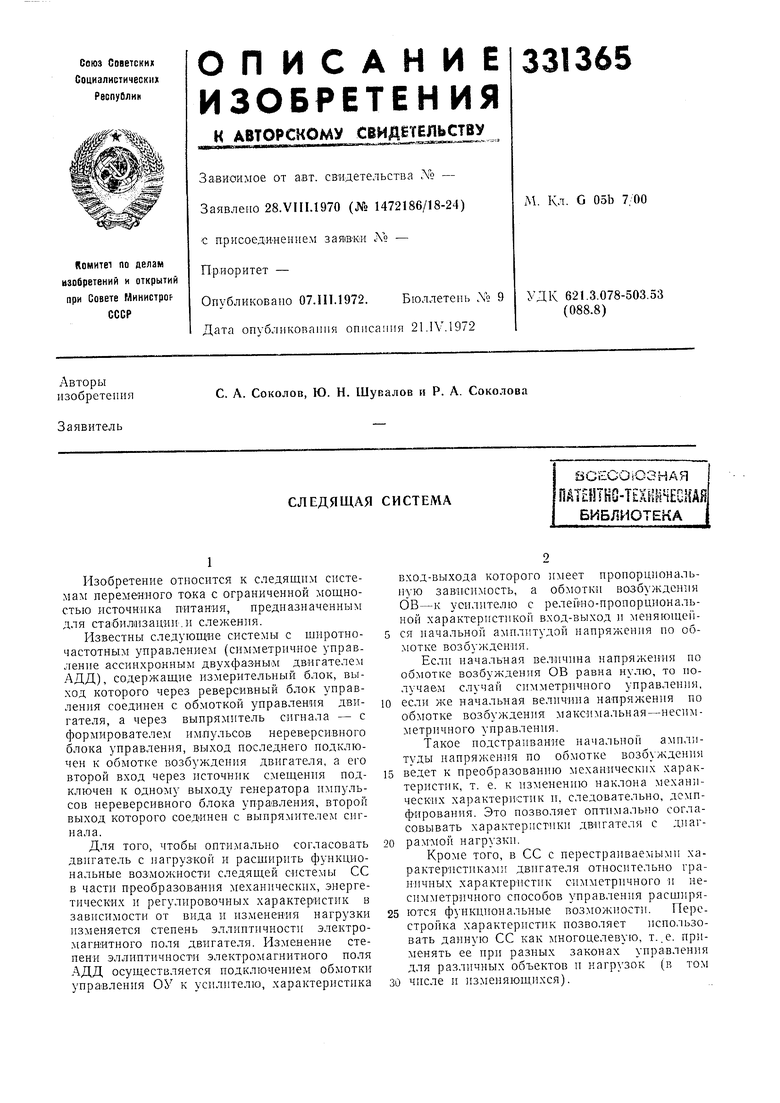
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящий привод для компенсации ки-НЕМАТичЕСКиХ пОгРЕшНОСТЕй МЕХАНизМОВ | 1979 |
|
SU817959A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ ЭЛЕКТРФДВИГАТЕЛЕЛ\ ПОСТОЯННОГО ТОКА / | 1970 |
|
SU274188A1 |
| Следящая система | 1975 |
|
SU532848A1 |
| СЛЕДЯЩАЯ СИСТЕМА | 1972 |
|
SU436326A1 |
| Следящая система | 1974 |
|
SU502371A1 |
| Реверсивный тиристорный электропривод с двухзонным регулированием | 1977 |
|
SU692043A1 |
| Счетчик постоянного тока | 1973 |
|
SU579586A1 |
| Блок управления ШИМ-регулятором для возбуждения синхронного двигателя | 2022 |
|
RU2796429C1 |
| Следящая система | 1972 |
|
SU470784A1 |
| УСИЛИТЕЛЬ МОЩНОСТИ | 1970 |
|
SU269219A1 |