1
Следящая система переменного тока с двухфазным асинхронным исполнительным двигателем может быть использована в приборах и устройствах автоматического регулирования, в счетно-решающей, моделирующей, навигационной и радиолокационной технике.
По основному авт. св. № 235136 известна следящая система переменного тока с использованием квадратурной составляющей, содержащая блок сравнения, усилительно-преобразовательный тракт, двухфазный асинхронный двигатель, датчик полярности сигнала ошиб,ки, бесконтактное реле и фазовращатель.
Однако в такой следящей системе момент переключения обмотки возбуждения двигателя на реверс не зависит от скорости его вращения, что обуславливает значительные, длительность переходного процесса и величину перерегулирования и большое число колебаний в переходном процессе.
Цель изобретения заключается в повышении устойчивости следящей системы, уменьшении времени переходного процесса, величины перерегулирования и числа колебаний в нем.
В предложенной системе для реверса двигателя в нужный момент времени использовано бесконтактное реле с регулируемой зоной нечувствительности, величина которой изменяется сигналом с тахогенератора, механически связанного с валом двигателя. В результате
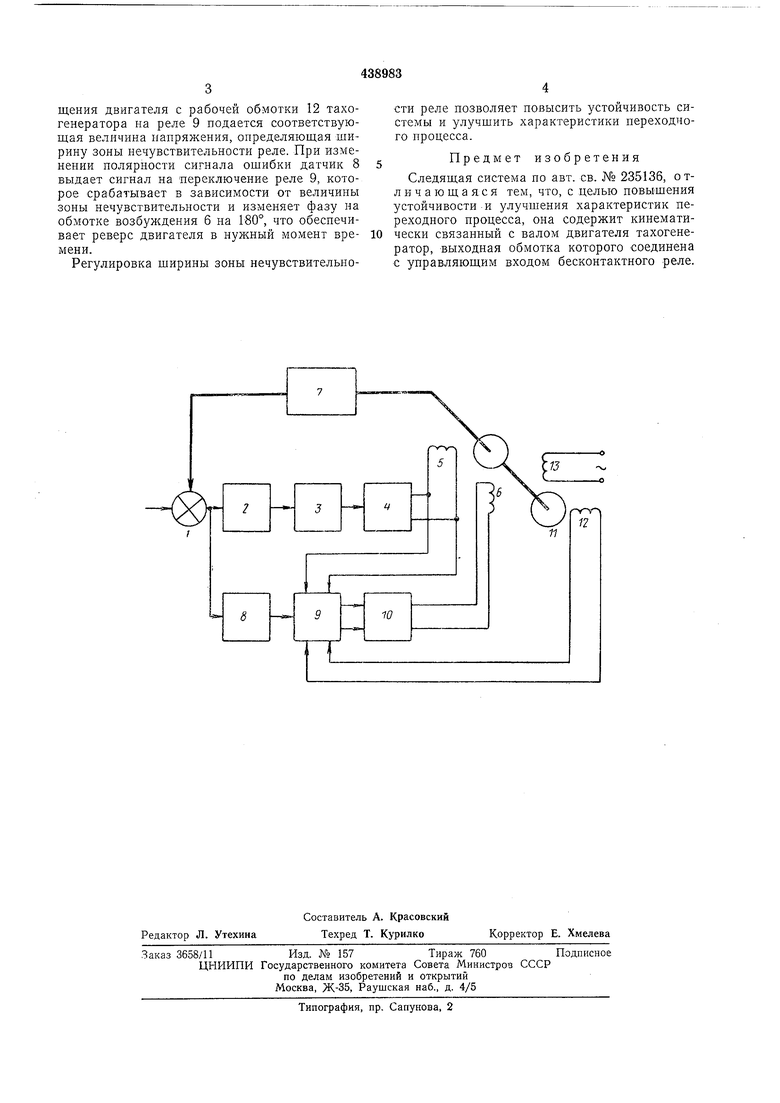
этого момент реверса двигателя становится функцией скорости его вращения, что позволяет увеличить устойчивость системы и улучшить характеристики переходного процесса. Блок-схема следящей системы изображена на чертеже.
Система состоит из блока сравнения 1, усилителя напряжения 2, пассивного корректирующего устройства 3, усилителя мощности 4,
двухфазного асинхронного двигателя с обмоткой управления 5 и обмоткой возбуждения 6, редуктора 7, датчика полярности сигнала ошибки 8, бесконтактного реле 9 с регулируемой зоной нечувствительности, фазовращателя
10 и тахогенератора 11 с выходной обмоткой 12 и обмоткой возбуждения 13.
При появлении сигнала рассогласования на обмотку управления 5 исполнительного двигателя поступает сигнал управления, сформированный корректирующим устройством 3 и усиленной по мощности усилителем 4. Этот же сигнал через реле 9 и фазовращатель 10 подается на обмотку возбуждения 6 со сдвигом фазы по несущей частоте на 90°. Двухфазный асинхронный двигатель отрабатывает огибающую сигнала в виде угла поворота, разворачивая через редуктор 7 нагрузку и замыкая через блок сравнения 1 отрицательную связь, и приводит во вращение тахогенератор
11- При этом в зависимости от скорости вращения двигателя с рабочей обмотки 12 тахогенератора на реле 9 подается соответствующая величина напряжения, определяющая ширину зоны нечувствительности реле. При изменении полярности сигнала ошибки датчик 8 выдает сигнал на переключение реле 9, которое срабатывает в зависимости от величины зоны нечувствительности и изменяет фазу на обмотке возбуждения 6 на 180°, что обеспечивает реверс двигателя в нужный момент времени. Регулировка ширины зоны нечувствительности реле позволяет повысить устойчивость системы и улучшить характеристики переходного процесса.
Предмет изобретения
Следящая система по авт. св. № 235136, о тл и чающаяся тем, что, с целью повыщения устойчивости и улучшения характеристик переходного процесса, она содержит кинематически связанный с валом двигателя тахогенератор, выходная обмотка которого соединена с управляющим входом бесконтактного реле.
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1981 |
|
SU962844A1 |
| Реверсивный электропривод с двухзонным регулированием частоты вращения | 1978 |
|
SU780135A1 |
| Следящая система | 1979 |
|
SU862114A1 |
| Следящая система | 1978 |
|
SU752224A1 |
| Следящая система | 1975 |
|
SU742871A1 |
| СЛЕДЯЩАЯ СИСТЕМА | 1969 |
|
SU235136A1 |
| Реверсивный релейный электропривод | 1976 |
|
SU661703A1 |
| Следящая система | 1977 |
|
SU703776A1 |
| Следящая система | 1979 |
|
SU788076A1 |
| Электрогидравлический регулятор гидротурбины | 1967 |
|
SU363381A1 |
