Изобретение относится к автоматике и вычислительной технике и предназначено для позиционирования подвижных частей разных устройств относительно неподвижных, например в запоминающих устройствах с перемещаемыми головками или в станках с программным управлением.
Известно устройство для позиционирования, содержащее цифро-аналоговый преобразователь, подключенный к выходу арифметического блока, и соединенные последовательно усилитель, подключенный к выходу первого сумматора, и исполнительный двигатель, с выходом которого связаны блок обратной связи, подключенный к одному из входов первого сумматора, и преобразователь перемещений, цифровой выход которого соединен со входом арифметического блока. Однако разностный сигнал между сигналом положения и сигналом скорости является неточным из-за ступенчатости выходного сигнала цифро-аналогового преобразователя, что вызывает промежутки со скользящим режимом в переходном процессе и в конечном счете увеличивает время позиционирования.
Целью изобретения является повышение быстродействия и надежности работы устройства. В описываемом устройстве это достигается тем, что в нем установлен второй сумма ор, первый вход которого соединен с аналоговым выходом преобразователя перемещения, второй вход - с выходом цифро-аналогового преобразователя, а выход второго сумматора подключен к другому входу первого
сумматора.
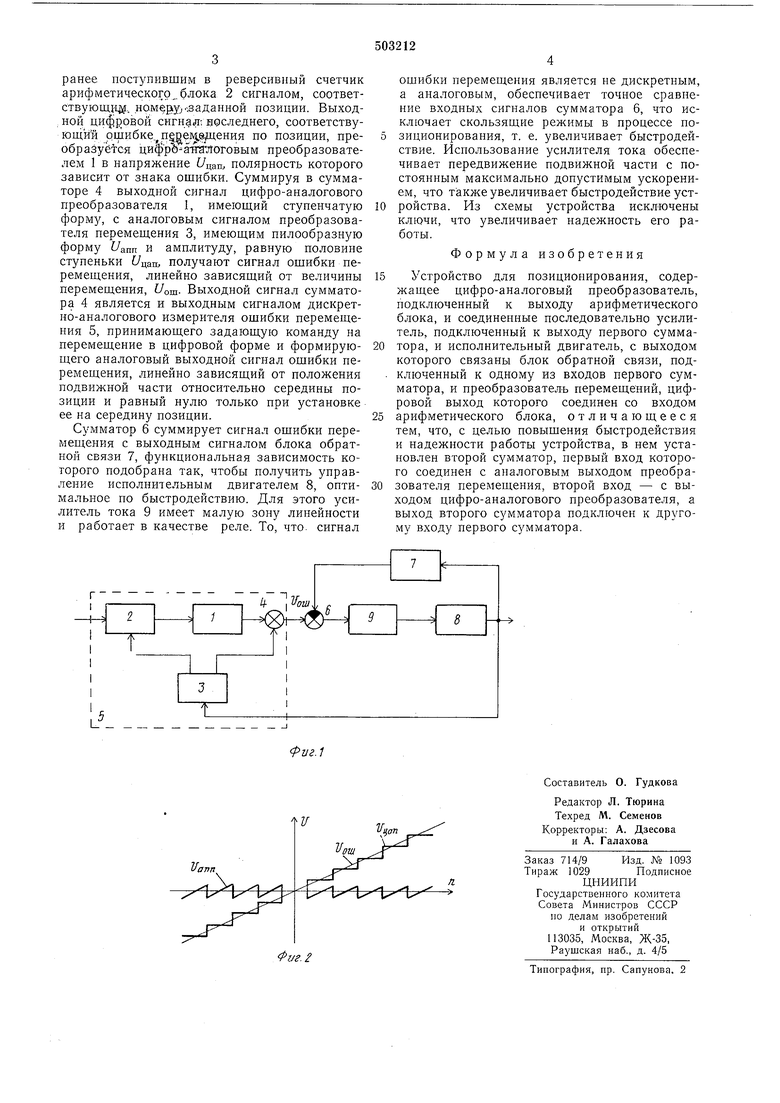
На фиг. 1 показано описываемое устройство; на фиг. 2 - диаграмма его работы.
Устройство содержит цифро-аналоговый преобразователь 1, подключенный к арифметическому блоку 2. Дискретный выход двухкапального индуктивного преобразователя перемещений 3 соединен с арифметическим блоком 2, а аналоговый выход - с одним входом второго сумматора 4, ко второму входу
которого подключен выход цифро-аналогового преобразователя 1. Выход второго сумматора 4, являющийся одновременно выходом л1искретно-аналогового измерителя ощибки перемещений 5, подключен к первому входу первого сумматора 6, на второй вход которого подключен выход блока 7 обратной связи по скорости вращения исполнительного двигателя 8. К выходу первого сумматора 6 подключен усилитель 9, к выходу которого подключен исполнительный двигатель 8.
Сигнал цифрового выхода преобразователя перемеп1.ений 3 в унитарном коде поступает в арифметический блок 2, где производится алгебраическое суммирование импульсов, поступающих с преобразователя перемещений 3, с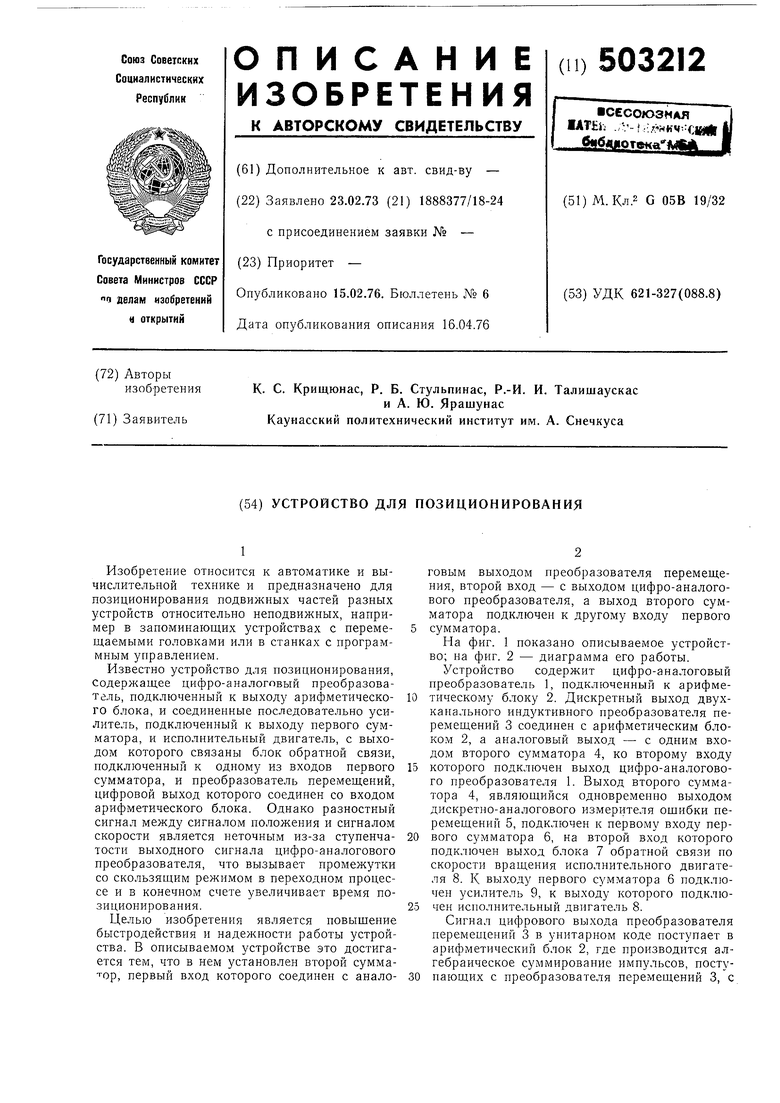
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО ПОЗИЦИОНИРОВАНИЯ | 1973 |
|
SU382140A1 |
| Устройство для позиционирования | 1977 |
|
SU741235A1 |
| Цифроаналоговая система позиционирования | 1987 |
|
SU1500992A1 |
| Цифровой следящий привод | 1983 |
|
SU1151925A1 |
| Устройство для контроля сопротивления | 1988 |
|
SU1615639A1 |
| Устройство для программного управления позиционированием | 1985 |
|
SU1267360A1 |
| Устройство координатного позиционирования | 1989 |
|
SU1695264A1 |
| Устройство для автоматического позиционирования поперечины | 1978 |
|
SU747695A1 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА АВТОСОПРОВОЖДЕНИЯ | 1993 |
|
RU2081383C1 |
| Преобразователь кода в угол поворота вала | 1989 |
|
SU1711330A1 |
