Изобретение относится к автоматизированным системам с цифровыми регуляторами и может найти применение в следящих системах с импульсными датчиками обратной связи, с цифровым заданием управляющего воздействия.
Известен цифровой регулятор, содержащий задатчик регулируемой величины, цифровой сумматор, распределитель импульсов, реверсивный счетчик, цифро-аналоговый преобразователь, фильтр низких частот, исполнительный механизм и датчик обратной связи 1.
Недостатком данного устройства является то, что старш-ие разряды выхода сумматора соединены с входом реверсивного счетчика, при этом передача информацииосуществляется со старших разрядов сумматора в реверсивный счетчик в параллельном виде, что приводит к скачкообразному изменению напряжения на выходе цифро-аналогового преобразователя (ЦАП). Амплитуда скачкообразного напряжения зависит от величины напряжения на выходе сумматора, что приводит к снижению точности за счет неравномерного движения выходного звена исполнительного двигателя.
Наиболее близким к изобретению по технической сущности является цифровой следящий электропривод, содержащий триггер знака, прямой выход которого соединен с первыми входами первого и второго элементов И-НЕ, выходы которых подключены соответственно к первым входам первого и второго элементов ИЛИ-НЕ, а инверсный выход триггера знака соединен с первыми входами третьего и четвертого элементов И-НЕ, выходы которых подключены к вторым входам соответственно первого и второго элементов ИЛИ-НЕ, и последовательно соединенные реверсивный счетчик, преобразователь кода, усилитель мощности, исполнительный двигатель, импульсный датчик блок, обратной связи, задающий блок, схемы контроля переполнения и нуля счетчика 2.
Недостатком известного устройства является то, что оба выхода задающего блока подключены к суммирующему входу реверсивного счетчика, а выходы блока обратной связи - к вычитающему входу реверсивного счетчика. При такой схеме режим торможения исполнительного элемента осуществляется только за счет уменьшения количества импульсов с выхода задающего устройства. При этом знак направления движения изменяется до тех пор, пока скорость перемещения не установится до нулевого значения. В противном случае изменение знака направления на противоположный ведет к скачкообразному изменению напряжения на выходе преобразователя кода, что приводит к возникновению в природе динамического удара, соответственно резко снижает надежность работы привода и всего устройства, уменьшает точность отработки траектории. Этот недостаток исключает возможность использования такого привода в высокоточном оборудовании, например в станках типа «Обрабатывающий центр или сборочных роботах.
Цель изобретения - повыщение точности и надежности привода.
0 Поставленная цель достигается тем, что в цифровой следящий привод, содержащий первый преобразователь кода, входы которого подключены к первому и второму входам привода, элементы И-НЕ, инвертор,
5 триггер знака, элементы И, элементы ИЛИ-НЕ и последовательно соединенные реверсивный счетчик импульсов, второй преобразователь кода, усилитель мощности и исполнительный двигатель, вал которого механически связан с импульсным датчиком,
0 выходом подключенным к блоку обратной связи, причем выходы первого и второго элементов И-НЕ соединены соответственно с первым и вторым входами триггера знака, выходы первого и второго элементов
5 И через первый элемент ИЛИ-НЕ подключены к первому входу реверсивного счетчика импульсов, выходы третьего и четвертого элементов И через второй элемент ИЛИ-НЕ - к второму входу реверсивного счетчика импульсов, прямой выход триггера знака соединен с первыми входами второго и четвертого элементов И, а инверсный выход триггера знака - с первыми входами первого и третьего элементов И, введены первый, второй и третий элементы ИЛИ, причем первые входы первого и второго элементов ИЛИ подключены к соответствующим выходам первого преобразотвателя кода, вторьге входы - к выходам блока обратной связи, а выходы - к первым входам соответственно первого и второго элементов И-НЕ, выходы реверсивного счетчика импульсов через третий элемент И-НЕ соединены с вторыми входами первого и второго элементов И, а через третий элемент ИЛИ - с вторыми входами третьего и четвертого элементов И, выход
5 первого элемента ИЛИ подключен к третьим входам первого и четвертого элементов И, выход второго элемента ИЛИ - к третьим входам второго и третьего элементов И, выход третьего элементом ИЛИ через инвертор - к вторым входам первого и второго элементов И-НЕ, прямой выход триггера знака - к второму входу второго преобразователя кода, а третьи выходы второго элемента ИЛИ и реверсивного счетчика импульсов - к третьему входу привода.
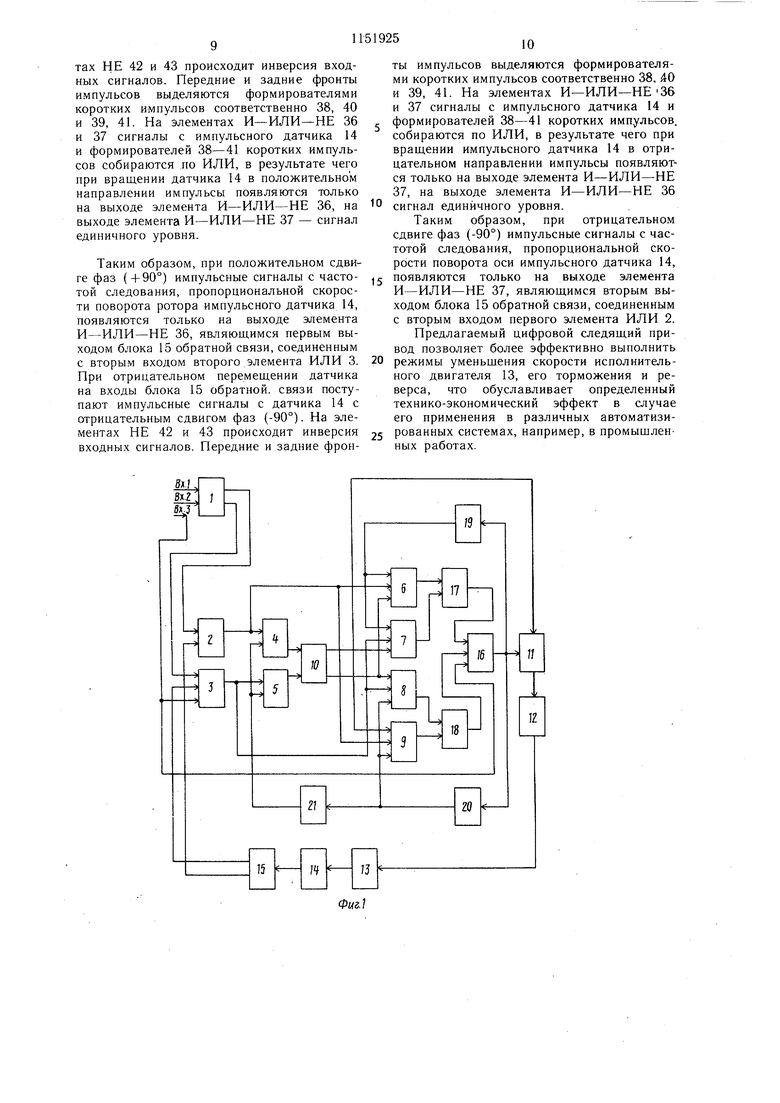
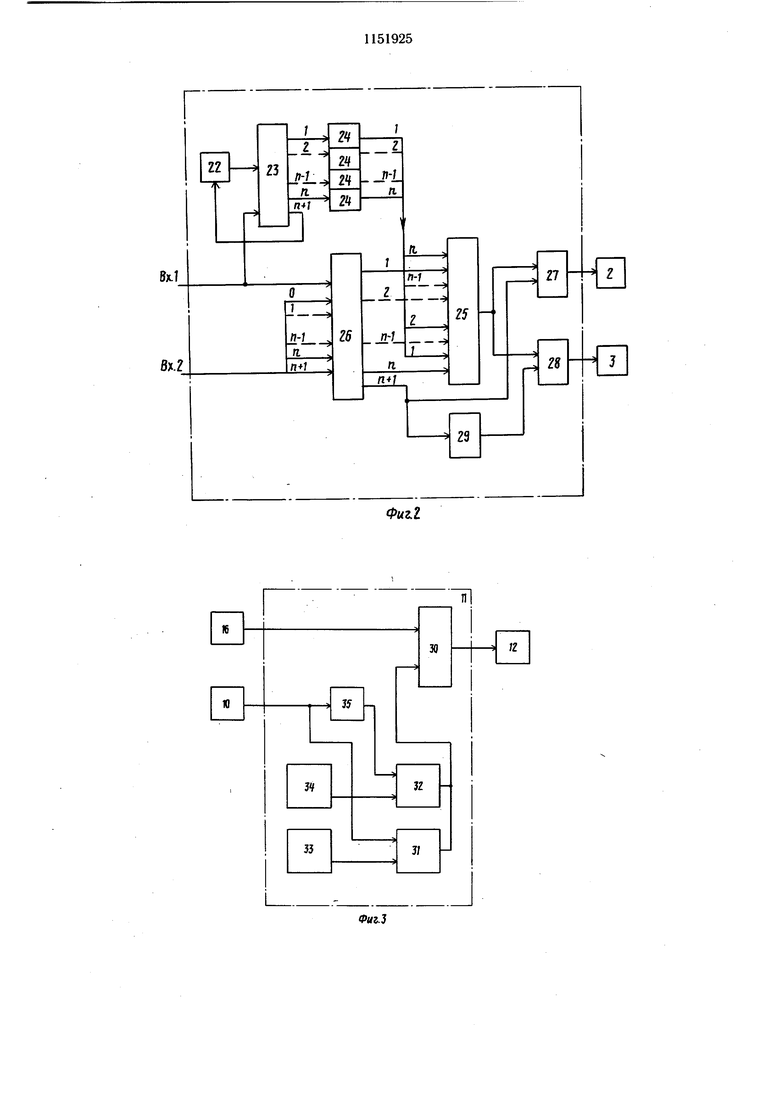
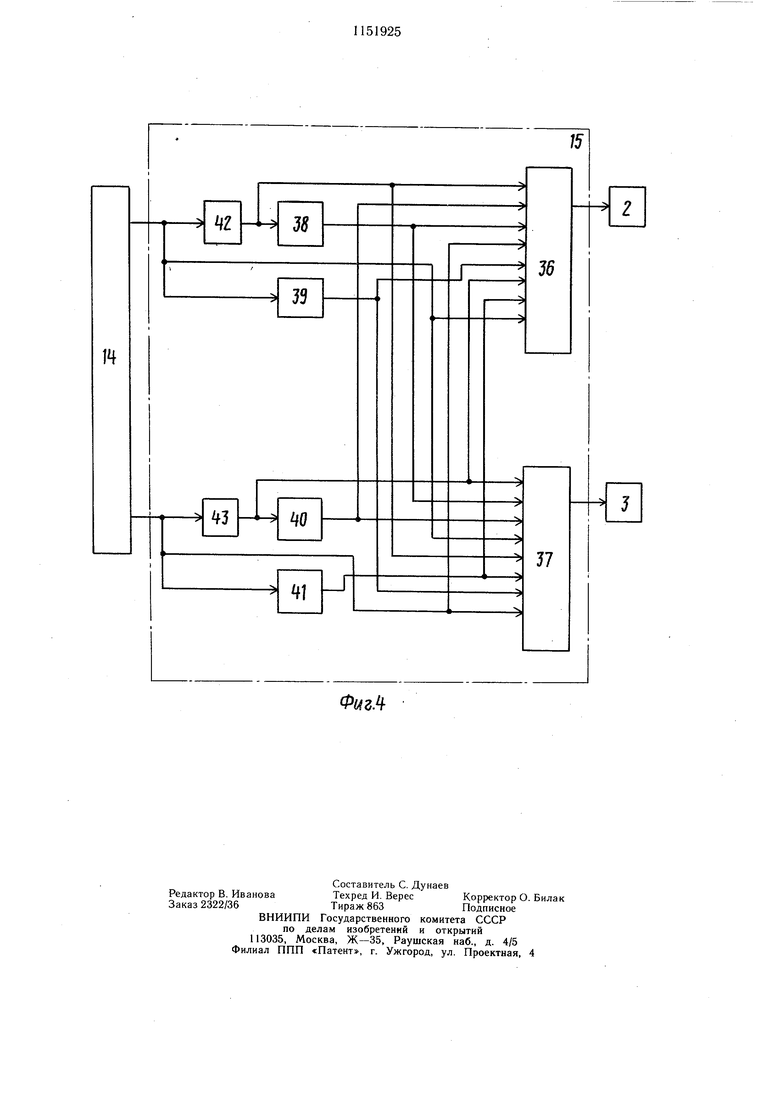
На фиг. 1 изображена блок-схема цифрового следящего привода; на фиг. 2 - блоксхема первого преобразователя кода; на
фиг. 3 - блок-схема второго преобразователя кода; на фиг. 4 - блок-схема блока обратной связи.
Цифровой следящий привод содержит первый преобразователь 1 кода, первый и второй элементы ИЛИ 2 и 3, первый и второй элементы И-НЕ 4 и 5, первый, второй, третий и четвертый элементы И 6-9, триггер 10 знака, второй преобразователь 1 кода, усилитель 12 мощности, исполнительный двигатель 13„ импульсный датчик 14, блок 15 обратной связи, реверсивный счетчик 16 импульсов, первый и второй элементы ИЛИ-НЕ 17 и 18, третий элемент И- НЕ 19, третий элемент ИЛИ 20, инвертор 21, генератор 22 импульсов, счетчик 23 импульсов, формирователи 24 импульсов, элемент И-ИЛИ-НЕ 25, регистр 26, элементы И 27 и 28, инвертор 29, цифро-аналоговый преобразователь 30, элементы И 31 и 32, источники 33 и 34 опорного напряжения, инвертор 35, элементы И-ИЛИ-НЕ 36 и 37, формирователи 38-41 импульсов/ элементы НЕ 42 и 43.
Цифровой следящий привод работает следующим образом.
При включении питания привода по сигналу начальной установки, приходящему на третий вход привода, реверсивный счетчик 16 импульсов устанавливается в единичное состояние, а триггер 10 знака устанавливается в единичное состояние. Код скорости перемещения на входе первого преобразователя Г кода имеет нулевое значение. Импульсы задания скорости с выхода первого преобразователя 1 кода и импульсы обратной связи с блока 15 обратной связи отсутствуют. На выходе второго преобразователя 11 кода и выхода усилителя 12 мощности присутствует сигнал нулевого уровня.
После задания направления перемещения с ЦВМ, например положительного, определяемого нулевым значением знакового разряда кода, поступающего на вход первого преобразователя 1 кода и задания кода скорости пере.мещения в первом преобразователе 1 кода, с его первого выхода ( + 1) на первый вход элемента ИЛИ 2 начинают поступать импульсы единичного кода, количество которых за период управления привода определяет значение скорости перемещения исполнительного двигателя 13. При этом первый импульс с выхода элемента ИЛИ 2 через элемент 4 устанавливает триггер 10 знака в нулевое состояние, а на его инверсном выходе появляется логическая единица. Импульсы с выхода элемента ИЛИ 2 через последовательно включенные элементы И 6, ИЛИ-НЕ 17 поступают на первый (суммирующий) вход реверсивного счетчика 16 импульсов. Первый импульс в двоичном реверсивном счетчике 16 преобразуется вторым преобразователем 11 кода в аналоговый сигнал и на выходе усилителя 12 мощности появляется сигнал Шьк 0. В результате чего исполнительный двигатель 13 и импульсный датчик 14 перемещаются в положительном направлении. Одновременно появляется логическая единица на выходе третьего элемента ИЛИ 20, которая при наличии единиц в реверсивном счетчике 16 импульсов разрещает прохождение импульсов на второй (вычитающий) вход реверсивного счетчика 16 импульсов и через инвертор 21 запрещает прохождение импульсов на вход триггера 10 знака.
Перемещение импульсного датчика 14 в положительном направлении вызывает появление последовательности импульсов на первом выходе блока 15 обратной связи, частота следования которых пропорциональна скорости поворота оси импульсного датчика 14.
Эти импульсы через элементы ИЛИ 3, И 8, ИЛИ-НЕ 18 поступают на второй (вычитающий) вход реверсивного счетчика 16 импульсов. В нем появляется число, соответствующее разности частот с первого преобразователя 1 кода и блока 15 обратной связи, а на выходе усилителя 12 мощности - аналоговый,сигнал +ивых , который увеличивается до тех пор, пока частоты с блока 15 обратной связи и первого преобразователя 1 кода не сравняются, что соответствует достижению исполнительным двигателем 13 скорости перемещения, равной заданной в положительном направлении. Если произойдет перерегулирование и частота следования импульсов с блока 15 обратной связи превысит частоту с выхода первого преобразователя 1 кода число в реверсивном счетчике 16 импульсов уменьщится, а соответственно уменьщится и напряжение + UBHX на выходе усилителя 12 мощности, что приведет к уменьщению скорости перемещения исполнительного двигателя 13, а также уменьщит частоту следования импульсов с блока 15 обратной связи. Таким образом, осуществляется автоматическое поддержание заданной скорости. Установка значения скорости осуществляется записью кода скорости в первый преобразователь 1 кода.
Для обратного движения исполнительного двигателя 13 в первый преобразователь 1 кода заносятся код скорости и его знак «1, соответствующий обратному направлению перемещения, при этом с второго выхода первого преобразователя 1 кода на вход элемента ИЛИ 3 начнут поступать импульсы единичного кода заданной скорости. Первый импульс с выхода элемента ИЛИ 3 через элемент И-НЕ 5 установит триггер 10 знака в единичное состояние и
на его прямом выходе появится логическая единица. Импульс с выхода элемента ИЛИ 3 через элементы И 7, ИЛИ-НЕ 17 поступает на первый (суммирующий) вход реверсивного счетч11ка 16 импульсов. Первый импульс в реверсивном счетчике 16 импульсов преобразуется вторым преобразователем 11 кода в аналоговый сигнал и на выходе усилителя 12 мощности появится сигнал UBVIX О, который вызовет перемещение исполнительного двигателя 13 и импульсного датчика 14 в обратном направлении. Одновременно появится уровень логической единицы на выходе третьего элемента ИЛИ 20, который разрешает прохождение импульсов с выхода элемента ИЛИ 2, через элементы И 9, ИЛИ-НЕ 18 на второй (вычитающий) вход реверсивного счетчика 16 импульсов, а через инвертор 21 запретит поступление импульсов через элементы И-НЕ 4 и 5 на входы триггера 10 знака.
Перемещение импульсного датчика 14 в обратном направлении вызывает появление последовательности импульсов на втором выходе блока 15 обратной связи с частотой, пропорциональной скорости поворота оси датчика 14. Эти импульсы через элементы ИЛИ 2, И 9, ИЛИ-НЕ 18 поступают на второй (вычитающий) вход реверсивного счетчика 16 импульсов. В случае переполнения реверсивного счетчика 16 импульсов на выходе элемента И-НЕ 19 появляется логический ноль, запрещающий прохождение импульсов через элементы И 6, И 7, ИЛИ-НЕ 17 на первый (суммирующий) вход реверсивного счетчика 16 импульсов, чем предотвращается его переход в нулевое состояние. На выходе второго преобразователя 11 кода и усилителя 12 мощности в этом случае присутствует максимальный сигнал +ивых или - Usbix в зависимости от состояния триггера 10 знака и обеспечивается максимальная скорость перемещения исполнительного двигателя 13 в соответствующем направлении. При изменении направления движения величина напряжения на выходе усилителя 12 мощности плавно изменяется за счет уменьщения частоты следования импульсов с первого преобразователя 1 кода или подачи с него импульсов противопоположного направления движения. Таким образом, может быть сформирован любой наиболее эффективный для данного исполнительного двигателя 13 закон разгона и торможения.
При движении исполнительного двигателя 13 в положительном направлении со скоростью задаваемой последовательностью импульсов с первого выхода первого преобразователя 1 кода триггер 10 знака установлен в нулевое состояние, и импульсы с выхода элемента ИЛИ 2 через элементы И 6 и ИЛИ-НЕ 17 поступают на первый (суммирующий) вход реверсивного счетчика 16 импульсов. Импульсы обратной связи с первого выхода блока 15 обратной связи через элемент ИЛИ 3 и элементы И 8 и ИЛЛ-НЕ
17 поступают на второй (вычитающий) вход реверсивного счетчика 16 импульсов. При изменении направления движения на обратное в первый преобразователь 1 кода записывается код скорости с противоположным знаком, при этом задающие импульсы с второго выхода первого преобразователя 1 кода Начинают поступать на вход второго элемента ИЛИ 3 и совместно с импульсами обратной связи поступают на второй вычитающий вход реверсивного счетчика 16
импульсов, что приводит к быстрому уменьшению числа, записанному в счетчик и соответственно уменьшению абсолютного значения напряжения на выходе усилителя 12 мощности и быстрому торможению исполнительного двигателя 13. При достижении нулевого состояния реверсивного счетчика 16 импульсов появляется логический ноль на выходе третьего элемента ИЛИ 20, который запрещает дальнейшее прохождение импульсов через элементы И 8 и 9 и элемент
ИЛИ-НЕ 18 на второй (вычитающий) вход реверсивного счетчика 16 импульсов. Одновременно появляется логическая единица на выходе инвертора 21, которая разрешает прохождение импульсов через элементы И-НЕ 4 или 5. Следующим после этого
импульсом с выхода элемента ИЛИ 3 через элемент И-НЕ 5 триггер 10 знака переключится в единичное состояние, разрешит прохождение импульсов через элементы И 7 и 9, запретит прохождение импульсов через элементы И 6 и 8 и переключит знак выходного напряжения во втором преобразователе 11 кода. В результате этого задаюшие импульсы с выхода второго элемента ИЛИ 3 через элемент И 7 и элемент ИЛИ- НЕ 17 начинают поступать на первый (суммирующий) вход реверсивного счетчика 16 импульсов. После поступления на первый (суммирующий) вход реверсивного счетчика 16 импульсов первого импульса на выходе третьего элемента ИЛИ 20 вновь появляется логическая единица, разрещающая прохождение импульсов через элементы И 8 и 9, на выходе инвертора 21 появляется логический ноль, запрещающий прохождение импульсов через элементы И-НЕ 4 и 5 на установку триггера. 10 знака. По мере накопления импульсов в реверсивном счетчике 16 импульсов на выходе усилителя 12 мощности увеличивается выходное напряжение противоположного знака, и исполнительный двигатель 13 начинает ускоренное движение в обратном направлении, при этом импульсы обратной связи появляются на втором выходе блока 15 обратной связи и через элемент ИЛИ 2, элемент И 9, элемент ИЛИ-НЕ 18 начинают поступать на второй (вычитающий) вход двоичного реверсивного счетчика 16.
Первый преобразователь 1 кода работает следующим образом.
Код от ЦВМ, задающий скорость перемещения исполнительного двигателя 13, поступает в регистр 26, причем старщий разряд определяет знак перемещения. Прием кода осуществляется по сигналу на вход от ЦВМ, определяющего цикл управления привода и поступающего на синхронизирующий вход регистра 26. Одновременно сигналом «Т устанавливается в ноль (по входу R) счетчик 23 импульсов и запускается генератор 22 импульсов. Импульсы с выхода генератора 22 импульсов поступают на счетный вход счетчика 23, а с его выходов поступают на соответствующие входы блока формирователей 24 коротких импульсов. На выходах формирователей 24 коротких импульсов формируются короткие импульсы от переднего фронта импульсов с каждого выхода счетчика 23.
При этом частота следования импульсов имеет максимальное значение на первом выходе блока формирователей 24 коротких импульсов, где выделяются передние фронты с первого выхода счетчика 23 и соответственно уменьшаются с кратностью, равной двум, на каждом последующем выходе блока формирователей 24 коротких импульсов. Импульсы с выходов блока формирователей
24коротких импульсов поступают на соответствующие входы элемента И-ИЛИ-НЕ 25, куда поступают для попарной обработки (старший разряд регистра 26 и сигнал с выхода блока формирователей 24 коротких импульсов, имеющий максимальную частоту следования, младший разряд регистра 26 и сигнал с выхода блока формирователей 24 коротких импульсов, имеющий минимальную частоту следования).
Таким образом, при наличии единиць только в младшем разряде регистра 26, на выходе элемента И-ИЛИ-НЕ 25 будут проходить только импульсы, сформированные из передних фронтов старшего п-го разряда счетчика 23. При наличии единицы только в старшем п-м разряде регистра 26 на выход элемента И-ИЛИ-НЕ 25 будут проходить только импульсы от передних фронтов младшего разряда счетчика 23, при этом частота импульсов на выходе элемента И-ИЛИ-НЕ 25 будет в два раза меньше частоты импульсов, поступающих с генератора 22 импульсов. При наличии в регистре 26 единиц во всех п разрядах на выход элемента И-НЕ-НЕ 25 будут проходить импульсы от передних фронтов всех п разрядов счетчика 23 и частота импульсов на выходе элемента И-ИЛИ-НЕ
25будет максимальной и равной частоте импульсов, выдаваемых с генератора 22
импульсов. Импульсы с выхода элемента И-ИЛИ-НЕ 25 поступают на первые входы элементов И 27 и 28. при этом прохождение импульсов через элемент И 27 разрешается при наличии единицы в n-fl разряда регистра 26, который соединен с вторым входом элемента И 27, а прохождение импульсов через элeмe т И 28 разрещается при наличии логического нуля в п + 1 разряде регистров 26 и соответственно логической единицы на инверторе 29.
При переполнении разрядов счетчика 23 появляется единица на выходе п-|-1 разряда двоичного счетчика 23 и запрещает работу генератора 22 импульсов. Таким образом, за период между двумя тактовыми сигналами проходит только один цикл работы счетчика 23 и за один период управления на выходе элементов И 27 и 28 может появляться от 1 до (2 -1) импульсов в зависимости от значения кода, записанного в регистре 26. Таким образом, осуществляется преобразование кода, заданного с ЭВМ в соответствующее число импульсов.
Второй преобразователь 11 кода работает следующим образом.
Код, поступающий с реверсивного счетчика 16 импульсов на вход цифро-аналоговый преобразователь (ЦАП) 30, преобразуется в соответствующее аналоговое напряжение, максимальная величина которого определяется величиной выходного напряжения источников положительного 34 или отрицательного 33 напряжений в зависимости от знака перемещений. С выхода ЦАП 30 аналоговое напряжение поступает на вход усилителя 12 мощности. Знак выходного напряжения на ЦАПе 30 определяется знаком напряжения, поступающего с выходов элементов И 31 и 32 на знаковый вход ЦАП 30. При поступлении логического нуля с триггера 10 знака элемент И 31 закрыт, а от логической единицы с выхода инвертора 35 срабатывает элемент И 32 и подключает выход источника 34 положительного напряжения к знаковому входу ЦАП 30.
При поступлении с триггера 10 знака логической единицы на входы инвертора 35, элементов И 31 и 32 элемент И 32 будет закрыт логическим нулем с выхода потенциального инвертора 35, а через открытый элемент И 31 к знаковому входу ЦАПа 30 подключается источник 33 отрицательного напряжения.
Блок 15 обратной связи работает следующим образом.
С датчика 14, оцифрованного в коде Грея, импульсные сигналы поступают на первый и второй входы блока 15 обратной связи с частотой следования, пропорциональной скорости поворота ротора.импульсного датчика 14, при этом положительному вращению соответствует положительный сдвиг фаз между сигналами ( + 90°). На элементах НЕ 42 и 43 происходит инверсия входных сигналов. Передние и задние фронты импульсов выделяются формирователями коротких импульсов соответственно 38, 40 и 39, 41. На элементах И-ИЛИ-НЕ 36 и 37 сигналы с импульсного датчика 14 и формирователей 38-41 коротких импульсов собираются по ИЛИ, в результате чего при вращении датчика 14 в положительном направлении импульсы появляются только на выходе элемента И-ИЛИ-НЕ 36, на выходе элемента И-ИЛИ-НЕ 37 - сигнал единичного уровня.
Таким образом, при положительном сдвиге фаз (4-90°) импульсные сигналы с частотой следования, пропорциональной скорости поворота ротора импульсного датчика 14, появляются только на выходе элемента И-ИЛИ-НЕ 36, являющимся первым выходом блока 15 обратной связи, соединенным с вторым входом второго элемента ИЛИ 3. При отрицательном перемещении датчика на входы блока 15 обратной, связи поступают импульсные сигналы с датчика 14 с отрицательным сдвигом фаз (-90°). На элементах НЕ 42 и 43 происходит инверсия входных сигналов. Передние и задние фронты импульсов выделяются формирователями коротких импульсов соответственно 38, 40 и 39, 41. На элементах И-ИЛИ-НЕ36 и 37 сигналы с импульсного датчика 14 и формирователей 38-41 коротких импульсов, собираются по ИЛИ, в результате чего при вращении импульсного датчика 14 в отрицательном направлении импульсы появляются только на выходе элемента И-ИЛИ-НЕ 37, на выходе элемента И-ИЛИ-НЕ 36 сигнал единичного уровня.
Таким образом, при отрицательном сдвиге фаз (-90°) импульсные сигналы с частотой следования, пропорциональной скорости поворота оси импульсного датчика 14, появляются только на выходе элемента И-ИЛИ-НЕ 37, являющимся вторым выходом блока 15 обратной связи, соединенным с вторым входом первого элемента ИЛИ 2.
Предлагаемый цифровой следящий привод позволяет более эффективно выполнить режимы уменьшения скорости исполнительного двигателя 13, его торможения и реверса, что обуславливает определенный технико-экономический эффект в случае его применения в различных автоматизированных системах, например, в промышленных работах.
ФМд.
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровой следящий электропривод | 1979 |
|
SU800960A1 |
| Устройство для определения абсолютного положения вала исполнительного механизма | 1988 |
|
SU1781822A1 |
| Цифровой следящий электропривод | 1985 |
|
SU1308982A1 |
| Система программного управления электроприводом | 1987 |
|
SU1481708A1 |
| Устройство для управления вибрацией | 1981 |
|
SU1003017A1 |
| Реверсивный цифро-аналоговый интегратор-преобразователь | 1984 |
|
SU1247833A1 |
| Число-импульсный следящий электропривод | 1983 |
|
SU1124256A1 |
| Цифровой электропривод | 1983 |
|
SU1102002A1 |
| Устройство для стабилизации частоты вращения электродвигателя | 1990 |
|
SU1707723A1 |
| Преобразователь перемещения в код | 1988 |
|
SU1571762A1 |
ЦИФРОВОЙ СЛЕДЯЩИЙ ПРИВОД, содержащий первый преобразователь кода, входы которого подключены к первому и второму входам привода, элемеиты И-НЕ, инвертор, триггер знака, элемеиты И, элементы ИЛИ-НЕ и последовательно соединенные реверсивный счетчик импульсов, второй преобразователь кода, усилитель мощности и исполнительный двигатель, вал которого механически связан импульсным датчиком, подключенным выходом к блоку обратной связи, причем выходы первого и второго элементов И-НЕ соединены соответственно с первым и вторым входами триггера знака, выходы первого и второго элементов И через первый элемент ИЛИ- НЕ подключены к первому входу реверсивного счетчика импульсов, выходы третьего и четвертого элементов И через второй элемент ИЛИ-НЕ - к второму входу реверсивного счетчика импульсов, прямой выход триггера знака соединен с первыми входами второго и четвертого элементов И, а инверсный выход триггера знака - с первыми входами первого и третьего элементов И, отличающийся тем, что, с целью повыщения точности и надежности привода, в него введены первый, второй и третий элементы ИЛИ, первые входы первого и второго элементов ИЛИ подключены к соответствующим выходам первого преобразователя кода, вторые входы - к выходам блока обратной связи, а выходы - к первым входам соответственно первого и второго элементов И-НЕ, выходы реверсивного счетчика импульсов через третий элемент И- НЕ соединены с вторыми входами первого и второго элементов И, а через третий элемент ИЛИ - с вторыми входами третье(Л го и четвертого элементов И, выход первого эле.мента ИЛИ подключен к третьим входам первого и четвертого элементов И, выход второго элемента ИЛИ - к третьим входам второго и третьего элементов И, выход третьего элемента ИЛИ через инвертор - к вторым входам первого и второго элементов И-НЕ, прямой выход триггера ел знака - к второму входу второго преобразователя кода, а третьи входы второго элемента ИЛИ и реверсивного счетчика им пульсов - к третьему входу привода. tc сл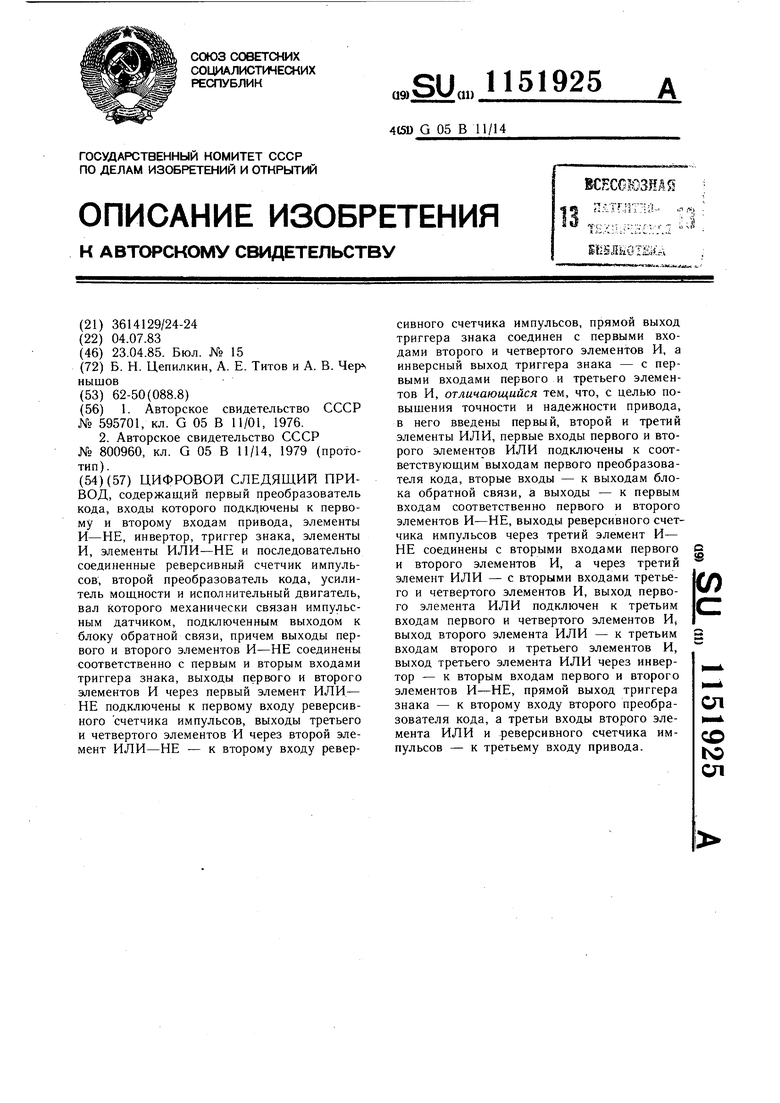
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Цифровой регулятор | 1976 |
|
SU595701A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Цифровой следящий электропривод | 1979 |
|
SU800960A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
