1
Изобретение относится к области aRтo a1НКИ и вычислительной техники и предназначено, например, для использования в запоминающих устройствах с перемещаемыми головками.
Известные устройства для автоматического иозициоиировапия, например, магнитных головок, содержащее цифрово-аналоговый преобразователь, подключенный к одному из выходов арифметческого блока, и соединенные последовательно усилитель, подключеиный к одному выходу сумматора, и иснолпительный двигатель, с выходом которого связа1 ы блок обратной связи и преобразователь перемещения, обладают ограниченным быстродействием и зоной нечувствительности, что ие позволяег обеспечить повышепные точность работы и быстродействие устройства.
Отличием описываемого ycTpoficTiia является то, что цифровой и аналоговый выходы преобразователя перемен1,еи11я соединеиы соответствеиио со входом арифметического блока и первым входом ключа, второй вход которого связаи с выходом цпфрово-аналогового преобразователя, а выход - с первым входом сумматора, выходы блока обратной связи соединены с дву.мя входами второго ключа, выход которого подключен ко второму входу сумматора, а третьи входы ключей соединены с другим выходом арифметического блока.
Это позволяет повысить точпость работы н быстроде1 1Ствпе устройства.
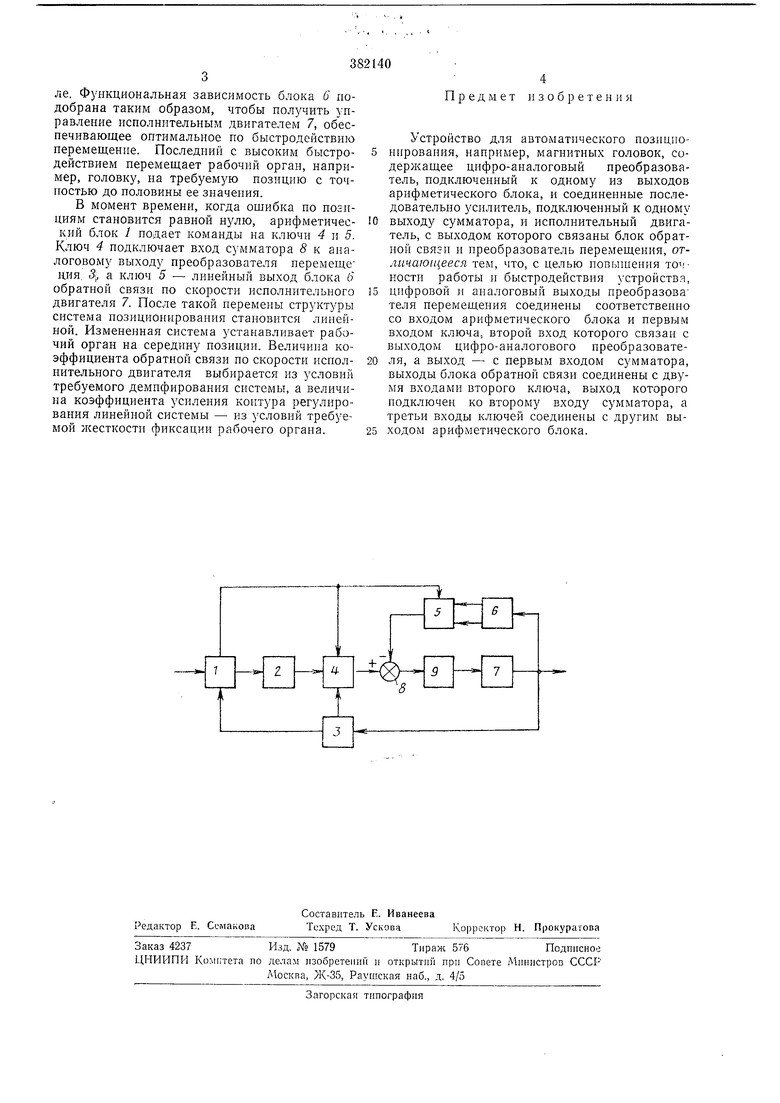
На чертеже показапа функциональная схема устройства.
Предлагаемое устройство содержнт арпфметнческпй блок /, цифрово-аналоговый преобразователь 2, преобразователь перемещения .), ключн 4 и 5, блок 6 обратной связп, исполнительный двнгате.чь 7, сумматор 8 и усилитель 9.
Устройство работает следующим образом.
Сигнал с цнфрового выхода преобразователя иеремещеиия S в унитарном коде постунает в арифметический блок /, где производится алгебраическое суммированне пмнульсоп, поступающих нз преобразователя перемещення 3 с содержаннем реверсивного счетчика ариф.метического блока, соответствующим номеру заданной позицип. Выходной цифровой сигнал последнего, соответствуют ошибке но ноз 1цням, нреобразуется цнфрово-ана.1огов1,1м пре образователсм 2 п напряжение, полярность которого запнсит от знака оишбкн. величине оипкжи, ОТЛИЧНО от , к сумматор) 1 ключом 4 подключено нанряженне с выхода цнфрово-аналогового преобразователя 2, а клю-чом 5 - ф нкнпональ)1ый выход блока 6 обратной связи но скоростн вращения неполнительного ДБ 1гателя 7. Усилитель 9 имеет малую зону линейности н работает в качестве реле. Функциональная зависимость блока 6 подобрана таким образом, чтобы получить управление исполнительным двигателем 7, обеспечивающее оптимальное по быстродействию перемещение. Последний с высоким быстродействием перемещает рабочий орган, например, головку, на требуемую позицию с точностью до половины ее значения.
В момент времени, когда ошибка по позициям становится равной нулю, арифметический блок 1 подает команды на ключи 4 и 5. Ключ 4 подключает вход сумматора 8 к аналоговому выходу преобразователя перемеще дня, 5;, а ключ 5 - линейный выход блока 6 обратной связи по скорости исполнительного двигателя 7. После такой перемены структуры система позиционирования становится линейной. Измененная система устанавливает рабочий орган на середину позиции. Величина коэффициента обратной связи по скорости исполнительного двигателя выбирается из условий требуемого демпфирования системы, а величина коэффициента усиления контура регулирования линейной системы - из условий требуемой лсесткости фиксации рабочего органа.
Предмет изобретения
Устройство для автоматического позиционирования, например, магнитны.х головок, содержащее цифро-аналоговый преобразователь, подключенный к одному из выходов арифметического блока, и соединенные последовательно усилитель, подключенный к одному
выходу сумматора, н исполнительный двигатель, с выходом которого связаны блок обратной связи и преобразователь перемещения, отличающееся тем, что, с целью повышения точности работы и быстродействия устройства,
цифровой и аналоговый выходы преобразователя перемещения соединены соответственно со входом арифметического блока и первым входом ключа, второй вход которого связан с выходом цифро-аналогового нреобразователя, а выход - с первым входом сумматора, выходы блока обратной связи соединены с двумя входами второго ключа, выход которого подключен ко второму входу сумматора, а третьи входы ключей соединены с другим выходом арифметического блока.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для позиционирования | 1977 |
|
SU741235A1 |
| Устройство для позиционирования | 1973 |
|
SU503212A1 |
| Устройство для позиционирования головок записи-воспроизведения | 1988 |
|
SU1550576A1 |
| Цифровое устройство для программного управления | 1983 |
|
SU1149220A1 |
| Цифроаналоговая система позиционирования | 1987 |
|
SU1500992A1 |
| Цифровой следящий привод | 1983 |
|
SU1151925A1 |
| Полигональный аппроксиматор | 1981 |
|
SU1005089A1 |
| Устройство для позиционирования головок записи-воспроизведения | 1985 |
|
SU1247937A2 |
| Устройство для позиционирования головок записи-воспроизведения | 1987 |
|
SU1446653A1 |
| Рекурсивное вычислительное устройство | 1980 |
|
SU881770A1 |
