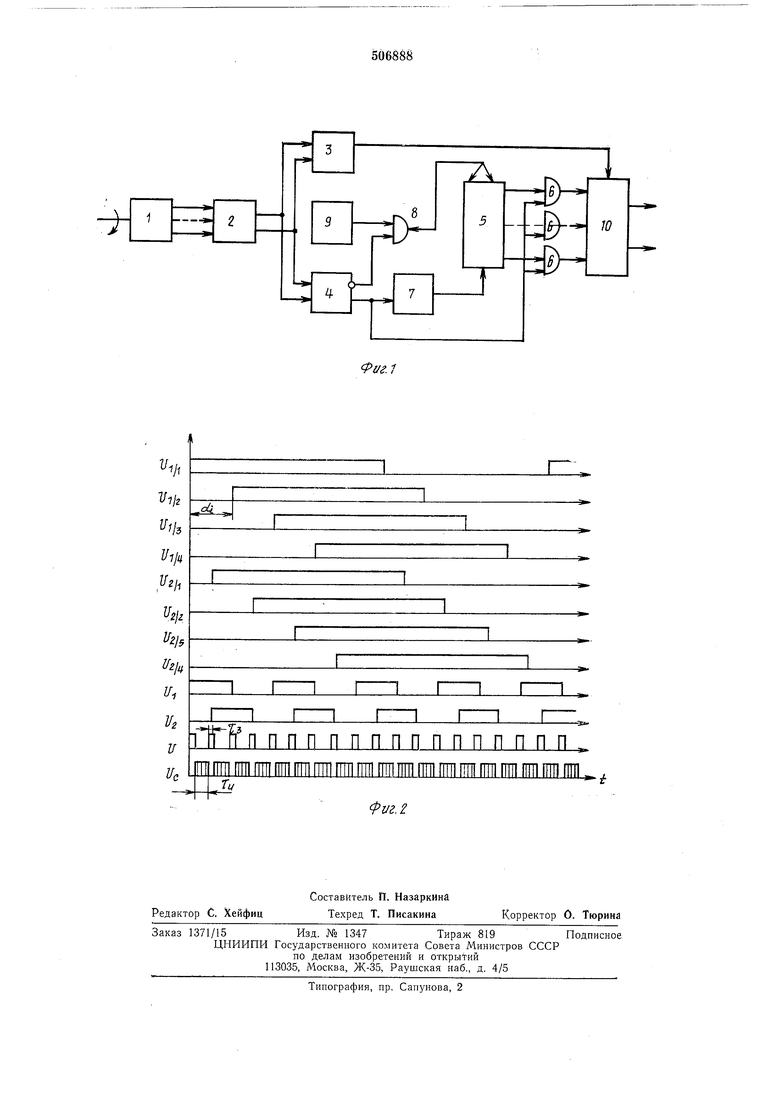
«И 6, к вторым входам которых подключены выход блока 4 и вход элемента задержки 7, выход которого соединен с входом сброса счетчика имнульсов 5. К счетному входу счетчика импульсов 5 подключен выход второй схемы «И 8, первый вход которой соединен с выходом генератора 9 эталонной частоты, а второй вход - с инверсным выходом блока 4. Выходы первых схем «И соединены с входами устройства 10 выдачи кода, к управляющему входу которого подключен выход блока 3.
На фиг. 2 приняты следуюш,ие обозначения: t - время; f/1/i, t/i/2, f/i/3, 1/4 - выходные сигналы фаз первого канала дискретного датчика перемещения 1; f/2/ь 2/2, 2/з, - выходные сигналы фаз второго канала дискретного датчика перемещения 1; f/i, U - сигналы с выхода 1-го и 2-го каналов блока пространственного умножения частоты импульсов; и-сигналы с прямого выхода блока выделения фронтов импульсов; f/c - сигналы на счетном входе счетчика импульсов 5.
Временная диаграмма выполнена с условием, что входной вал датчика вращается с постоянной скоростью в одном направлении.
С увеличением или уменьшением скорости расстояния аг между фронтами импульсов меняются обратно пропорционально скорости перемещения, а порядок чередования фронтов импульсов в каждом канале и фазе при изменении направления перемещения меняется на противоположный.
Блок пространственного умножения частоты импульсов формирует выходные сигналы, частота которых в каждом канале выше частоты поступающих сигналов в п раз. Каждый из выходных импульсов блока пространственного умножения частоты имеет передний фронт с импульса одной фазы, а задний фронт - с импульса другой фазы. Это может быть реализовано применением операции неравнозначности и суммирования в каждом канале.
Блок определения направления перемещения выдает сигнал на управляющий вход устройства 10 в зависимости от порядка чередования фронтов импульсов 1-го или 2-го каналов. Блок 4 формирует короткие импульсы U нормированной длительности но каждому поступающему на него фронту импульсного сигнала и объединяет каналы в один.
На счетный вход счетчика импульсов 5 постзпают сигналы Uc с генератора 9 эталонной частоты при наличии разрешающего сигнала на втором входе второй схемы «И 8. Разрешающий сигнал (инверсия основного сигнала) поступает с выхода блока 4. Таким образом, в течение временного интервала ти равного расстоянию между фронтами импульсов, а следовательно, обратного скорости перемещения, происходит заполнение счетчика импульсов 5.
При приходе последующего импульса через первые схемы «И 6 происходит съем параллельного кода с выходов разрядов счетчика импульсов, обратный код которого выражает
дискретную скорость перемещения контролируемого объекта. Разрешающий сигнал на входы схем «И 6 поступает в течение промежутка времени Тз в пределах части нормированной длительности импульсов И с прямого
выхода блока выделения фронтов импульсов. В течение последующей части нормированной длительности импульса И происходит сброс на нуль счетчика импульсов 5. Время задержки тз обеспечивается элементом задержки 7. Код счетчика импульсов запоминается в устройстве 10 выдачи кода. В зависимости от направления перемещения выходной код преобразователя выдается по тому или иному каналу выдачи кода. Включение
канала осуществляется по сигналам с блока определения направления перемещения. Таким образом, частота смены кода на выходе устройства выдачи кода равна частоте поступления фронтов импульсов, которая в п
раз превыщает частоту выдачи фронтов импульсов известного устройства, чем обеспечивается повыщенное быстродействие предлагаемого преобразователя.
Формула изобретения
Преобразователь скорости перемещения в код, содержащий дискретный датчик перемещения, блок определения направления перемещения, выход которого соединен с управляющим входом устройства выдачи кода, входы разрядов которого через первые схемы «И соединены с выходами разрядов счетчика импульсов, счетный вход счетчика импульсов
через вторую схему «И соединен с генератором эталонной частоты, вход сброса счетчика импульсов подключен к выходу элемента задержки, отличающийся тем, что, с целью повыщения быстродействия преобразователя,
в него введены блок пространственного умножения частоты импульсов и блок выделения фронтов импзльсов, а дискретный датчик перемещения выполнен с лростраиственносмещенными чувствительными элементами
фаз и каналов, нричем выходы чувствительных элементов каналов и фаз дискретного датчика перемещения соединены с входами блока пространственного умножения частоты импульсов, выходы которого подключены к
входам блоков выделения фронтов импульсов и определения направления перемещения, прямой выход блока выделения фронтов импульсов подключен к входу элемента задержки и другим входам первых схем «И, а инверсный
выход того же блока подключен к другому входу второй схемы «И.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для передачи и приема дискретной информации | 1981 |
|
SU1027838A1 |
| Устройство для измерения среднего индикаторного давления двигателя внутреннего сгорания | 1984 |
|
SU1283559A1 |
| СПОСОБ РЕГИСТРАЦИИ СЛАБЫХ СВЕТОВЫХ СИГНАЛОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2190196C1 |
| Многоканальный преобразователь разности частот в код | 1975 |
|
SU590849A1 |
| Система для передачи и приема дискретной информации | 1980 |
|
SU886296A1 |
| Преобразователь перемещение-код | 1974 |
|
SU511690A1 |
| Устройство цикловой синхронизации | 1989 |
|
SU1626431A1 |
| Устройство для дискретного преобразования Фурье | 1986 |
|
SU1361576A1 |
| Многоканальный генератор импульсов | 1977 |
|
SU670067A1 |
| ПРЕОБРАЗОВАТЕЛЬ УГЛА ПОВОРОТА ВАЛА В НАПРЯЖЕНИЕ | 1987 |
|
RU2056700C1 |
ппппппппппппппп
1Ш1Ш1 Ш 1Ш11Ш1ГПТ1ПШШ11Г Т Ш 1Т 11Ш
П-.
