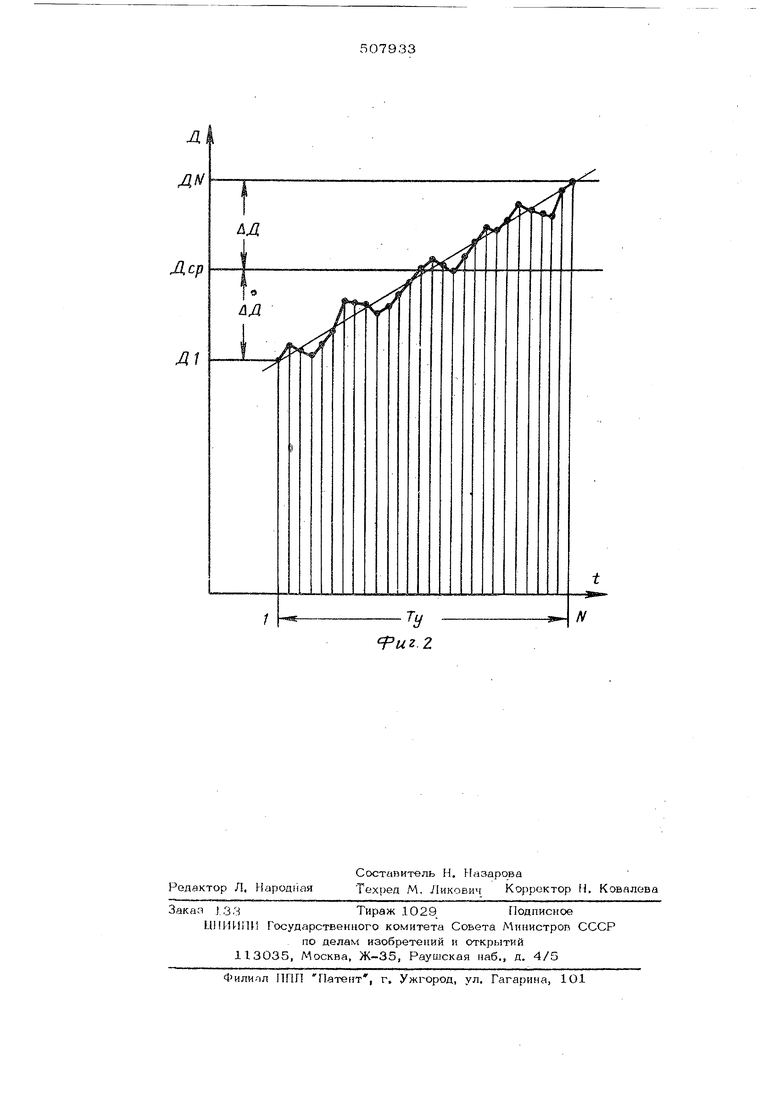
триггера знака реверса и с выходом первого элементаи При этом одни из управляющих входов четвёртого и пятого элементов И подключены к точке соединения выхода четвертой линии задержки со входом цятой линии задержки. На фиг. 1 представлена электрическая структурная схема кодирующего устройства линейного усреднения; на фиГ. 2 характер изменения измеряемого расстояния в процессе линейного усреднения, где Дер - значение регулярной составляющей измеряемого напряжения в середине интервала усреднения; л Д - динамическая ощиб ка линейного усреднения, знак которой зависит от направления полета самолета относительно объекта, до которого измеряется расстояние. Предлагаемое устройство состоит из генератора синхроимпульсов 1, пяти элементе И 2-1, 2-2, 2-3, 2-А, 2-5, счетчика импульсов 3, пяти линий задержек 4-1, 4-2, 4-3, 4-4, 4-5, элементе ИЛИ 5-1, 5-2, 5-3, сумматора в, устройства 7 ввода поправки, источников сигналов начала 8 и конца 9 интервала, формирователя импульсов сдвига 10, первого 11 и вт рого 12 триггеров управления, источников сигналов опорной 13 и переменной 14 фаз реверсивного счетчика 15, триггера знака реверса 16, триггера знака поправки 17. Динамическая ошибка равна величине и для ее определения необходимо решить уравнение: Дн- Д1 где Д1 - значение измеряемой величины в начале интервала усреднения; Дл - значение измеряемого параметра в конце интервала усреднения. Как. видно из фиг. 2 с ростом интервала усреднения величина динамической ошиб ки линейного усреднителя л Д возрастает Учитывая, что в фазометрических системах Опорный и измерительный сигналы флюктуируют, для определения поправки не обходимо использовать все значения измеряемого расстояния, то есть TVi.i Д Д s t-11 ас, . где Ti - нечетное число. Устройство работает следующим образом. Генератор синхроимпульсов 1 формирует импульсы, поступающие через первый элемент И 2-1 на счетчик импульсов 3 и реверсивный счетчик 15 поправки. Число импульсов, проходящих на счетчики, определяется длительностью сигнала, пропорционального разности фаз, locryiiaicvших от источников сигналов опорной 13 и переменной 14 фазы (пропорционального измеряемой дальности), формируемого в первом триггере управления 11, а также длительность сигнала, пропорционального длительности интервала усреднения Ту, формируемого вторым триггером управления 12.В счетчике импульсов 3 определяется результат одиночного измерения дальности, который через элементы И 2-2, 2-3 поступает в сумматор 6. В реверсивном счетчике 15 все нечетные результаты измерения записываются со знаком плюс, а все четные - со знаком минус. Триггер знака реверса 16 определяет четность или нечетность каждого конкретного измерения. При принятом методе записи к окончанию интервала усреднения в реверсивном счетчике 15 записывается число Д Д, равное динамической поправке линейного усреднителя. Знак поправки определяется с помощью триггера знака поправки 17, ко- тсфый в начальный момент устанавливается в состояние 1, соответствующее знаку поправки (-). В процессе работы реверсивного счетчика 15 на триггер знака поправки 17 подаются импульсы переполнения счетчика. Триггер знака попраки 17 определяет чет ность числа переполнений реверсивного счетчика 15 к моменту окончания определения поправки:. Если число переполнений четное, то знак поправки сохраняется, если нечетное, то знак поправки меняется на (+). Элементы , 2-5 обеспечивают вывод поправки из реверсивного счетчика 15 в прямом (элементИ 2-4) или до- полнйтельном (элемент И 2-5) коде синхронно с задержанным импульсом конца интервала усреднений. Поправка в прямом или дополнительном коде через элемент , 5-2, 5-3 поступает в сумматор 6 для компенсации динамической ошибки. Формула изобретения Кодирующее устройство линейного .усреднения, содержащее счетчик, один вход которого подключен через первый элемент генератору синхроимпульсов, а другой через первую линию задержки - к управляющему входу второго элемента И и через вторую линию з.адержки соединен с источником сигнала переменной фазы, а выходы соединены черезвторой и третий элемент И со входом сумматора; устройство ввода поправки, выходы которого подключены к другим входам сумматора, а вход через трАтью линию задержки - к источнику сигнала конца интервала; формирователь импульса сдвига, выход которого подключен к сумматору , а вход через четвёртую и пятую линии задержки с выходом третьей линии задержки, первый триггер управления, входы которого соединены с источниками сигнал(ж опорной и переменной фазы, а выход - со вторым входом первого элементами, и второй триггер управления, входы которого соединены с источниками сигналов начала и конца интервала, а выхоп - с третьим входом первого элемента И и с управляющим входом третьего элементаи, о т л и ч а ю щ ее с я тем, что, с целью снижения динамической ошибки усреднения, в него введены
реверсивный счетчик, триггер знака реверса, счетный вход которого поаключек к вь ходу первого триггера управления; четвертый и пятый элементы И, триггер знака поправки, вход которого подключен к одному иэ выходов реверсивного счетчика, а выходы - ко входам четвертого и пятого элементс« И и элементы ИЛИГ выходы которых подключены ко входам сумматора, а ВХОДЫ соединены через четвертый и пятый : элементыи с выходами реверсивного счет-чика, входы которого соединены с выходами упомянутого триггера знака реверса и с выходом первого элемента И, при этом одни из управляющих входов четвертого и шятого элементов и подключены к точке соединения выхода четвертой линии задержки со входом пятой линии задержки.
I.
I 77 ГI


| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО СТАБИЛИЗАЦИИ ТОКА ПУЧКА ЗАРЯЖЕННЫХ ЧАСТИЦ | 1990 |
|
RU2012167C1 |
| Устройство фазирования шкалы времени электронных часов | 1982 |
|
SU1084720A1 |
| Устройство контроля дальномера | 1975 |
|
SU563656A1 |
| Радиочастотный преобразователь разности фаз | 1984 |
|
SU1164625A1 |
| Устройство автоматической подстройки линейного закона частотной модуляции | 1984 |
|
SU1218463A1 |
| УСТРОЙСТВО ФАЗИРОВАНИЯ ШКАЛЫ ВРЕМЕНИ ЭЛЕКТРОННЫХ ЧАСОВ | 1994 |
|
RU2084944C1 |
| Устройство для моделирования радиоприемника | 1981 |
|
SU1012283A1 |
| ИЗМЕРИТЕЛЬ ПАРАМЕТРОВ СИГНАЛОВ С ЛИНЕЙНОЙ ЧАСТОТНОЙ МОДУЛЯЦИЕЙ | 1993 |
|
RU2099719C1 |
| Цифровой фазометр | 1987 |
|
SU1458836A1 |
| Функциональный преобразователь угла поворота вала в код | 1982 |
|
SU1080174A1 |

Фиг. 7
ЛЛ/
Дер
М1
7 -«
/
N
- 75
иг.2
