(54) ХРАПОВОЙ МЕХАНИЗМ РЕВЕРСИВНОГО ДЕЙСТВИЯ
Храповой механизм работает следующим образом.
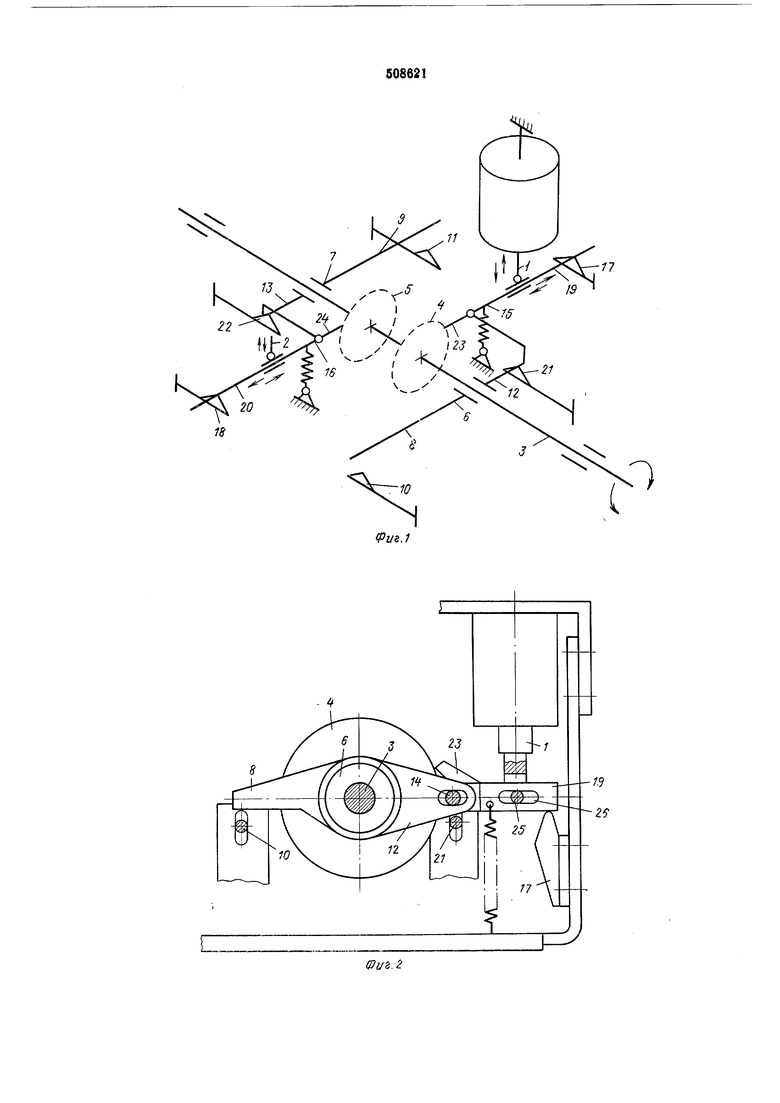
При включении первого электромагнита якорь 2 втягивается и поворачивает собачку 15 относительно пальца 14, вводя ее в зацепление с храповым колесом 4, и поворачивает последнее на угол, величина которого регулируется с помощ,ью упора 10. Поводок 6, П1арнирно соединенный с собачкой 15, обеспечивает плавное и точное зацепление собачки 15 с храповым колесом 4. По окончании поворота первый электромагнит отключается и собачка 15 с помощью пружины возвращается в исходное положение. Реверс осуществляется после включения второго электромагнита, когда якорь 2 вводит собачку 16 в зацепление с храповым колесом 5, поворачивая последнее вместе с осью 3 в направлении, противоположном направлению вращения храпового колеса 4.
Упоры 17 и 18 служат для регулирования положения собачек относительно храповых колес при выключенных электромагнитах, а упоры 21 и 22 - для регулирования положения собачек относительно вершины зуба храповых колес.
Описываемый механизм позволяет повысить к.п.д. по сравнению с существующими механизмами за счет отсутствия лищних связей между якорями электромагнитов и собачками, повысить плавность и точность зацепления, а также обеспечить быстрое и легкое регулирование механизма.
Формула изобретения
Храповой механизм реверсивного действия, содержащий два электромагнита, закрепленное на оси храповое колесо, два регулируемых упора, две собачки, выполненные в виде двуплечих рычагов, первое плечо которых взаимодействует с храповым колесом, а второе - с регулируемым упором, и два поводка, выполненные в виде двуплечих качающихся рычагов, первое плечо которых шарнирно соединено с собачкой с помощью пальца, отличающийся тем, что, с целью повышения надежности механизма и сокращения времени его
регулирования, он снабжен вторым храповым колесом, которое закреплено на одной оси с первым и с которым взаимодействует одна из собачек, двумя парами дополнительных регулируемых упоров, одна из которых взаимодействует со вторыми плечами поводков, а другая - с первыми плечами собачек, поводки свободно установлены на оси храповых колес, пальцы, соединяющие собачки с поводками, установлены в поводках с возможностью перемещения в плоскости, проходящей через ось храповых колес и ось пальца, в направлении, перпендикулярном оси храповых колес, с по следующей фиксацией собачек относительно поводков, второе плечо каждой собачки имеет
окно и шарнирно соединено с якорем электромагнита с помощью пальца, установленного в окне с возможностью перемещения вдоль последнего.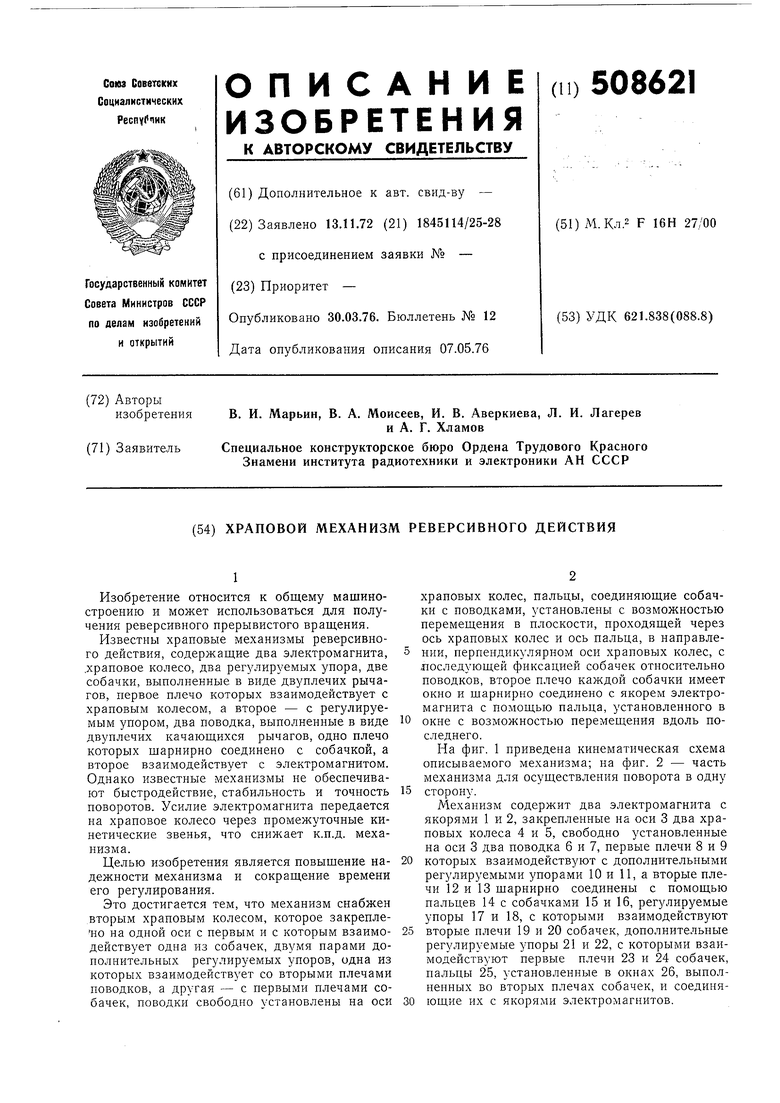
| название | год | авторы | номер документа |
|---|---|---|---|
| Дискретная реверсивная передача | 1981 |
|
SU1044872A1 |
| ХРАПОВОЙ МЕХАНИЗМ РЕВЕРСИВНОГО ДЕЙСТВИЯ | 1972 |
|
SU338718A1 |
| Механизм для смены шпуль к пестроткацкому станку | 1959 |
|
SU123887A1 |
| Устройство для шагового перемещения | 1988 |
|
SU1566135A1 |
| Порционный дозатор для сыпучих продуктов | 1973 |
|
SU476455A1 |
| Устройство для автоматической заправки перфоратора с устройством прерывистого протягивания перфорируемого материала | 1990 |
|
SU1728842A1 |
| Затвор для фотоаппарата | 1979 |
|
SU807196A1 |
| Основный регулятор ткацкого станка | 1983 |
|
SU1152984A1 |
| Диафрагма | 1986 |
|
SU1425583A1 |
| Устройство для автоматического включения и выключения приемников электрической энергии в заранее назначенное время | 1931 |
|
SU29884A1 |