I
Изобретение относится к машиностроению, и может быть использовано в автоматических линиях для шагового перемещения рабочих органов.
Цель изобретения - повышение надежности путем обеспечения жесткой связи привода и храпового колеса в течение всего рабочего хода.
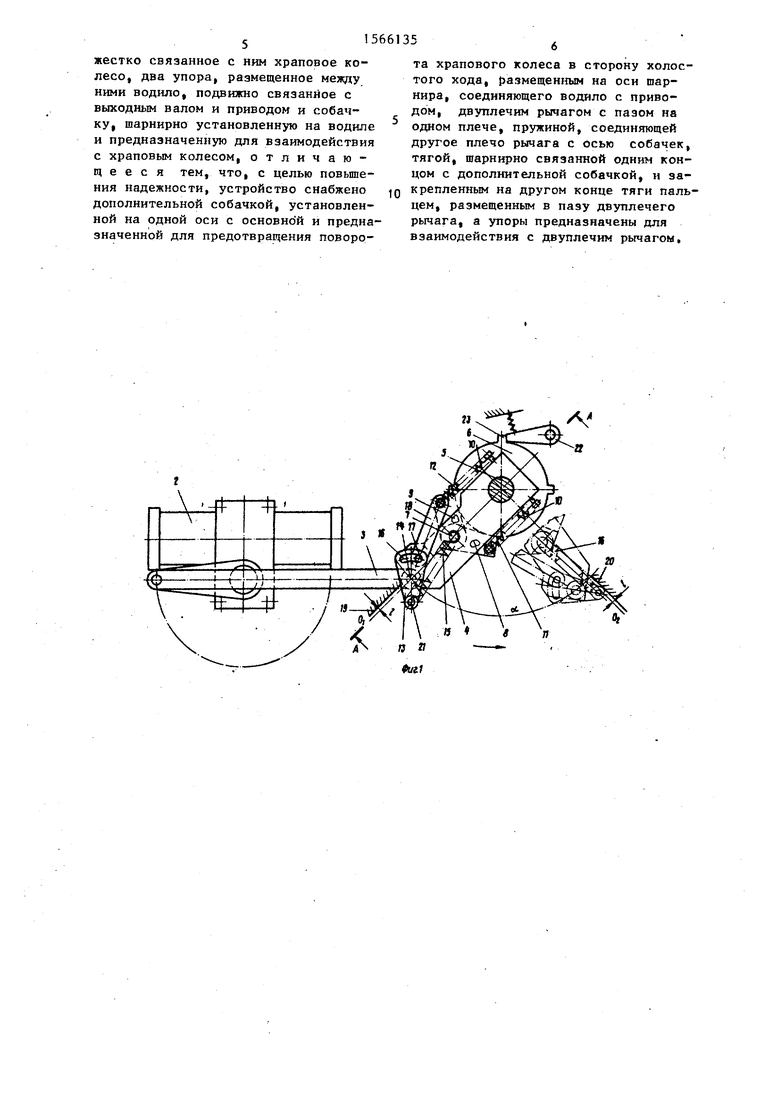
На фиг.1 изображено устройство; общий вид; на фиг.2 - то же, после поворота на один шаг; на фиг.З - разрез А-А на фиг.1,
Устройство содержит основание 1, на котором установлен реверсивный привод 2 с кривошипно-шатунным механизмом, шатун 3 которого гаарннрно связан с водилом 4. Последнее в свою очередь подвижно установлено на выходном валу 5. Храповое колесо 6 жестко связано с выходным валом 5. На во- диле 4 на одной оси 7 установлены две собачки 8 и 9, соответственно основная и дополнительная, подпружиненные пружинами 10 к храповому колесу 6 и взаимодействующее с каждой парой шагозадающих упоров 11 и 12 соответственно.
Двуплечий рычаг 13 установлен на оси 14, которая является общей для трех звеньев шатуна 3, водила 4 и рычага 13. Одно плечо последнего соединено с осью 7 посредством пружины 15, а на другом плече выполнен паз 16, в котором перемещается палец 17 тяги 18, шарнирно связанный с дополнительной собачкой 9,
Ка основании 1 на некотором рас- стоянии 1 вправо от осей 0, и 02, ограничивающих заданный максимальный угол о( поворота водила, выполнены упоры 19 и 20, предназначенные для взаимодействия с роликом 21, установ- ленным на плече рычага 13. При этом величина смещения 1 упоров меньше радиуса ролика 21. На основании закреплена еще одна подпружиненная собачка 22, взаимодействующая с упором 23, не находящимся в зацеплении с собачками 8 и 9.
Устройство работает следующим образом.
Шаговый поворот храпового колеса 6 выполняется, например, против часовой стрелки (фиг.1), холостой ход привода обратно - по часовой стрелке.
В исходном состоянии обе собачки
8и 9 прижаты пружинами 10 соответственно к упорам 11 и 12., шатун 3 кривошипно-шатунного механизма пневмо цилиндра 2 находится в крайнем ле- вом положении. Подается команда на реверсивный пневмоцилиндр 2, шатун 3 которого поворачивает водило 4 и храповое колесо 6 по заданному закону,, Вследствие того, что обе собачки 8 и
9прижаты к упорам, обеспечивается жесткая связь храпового колеса 6 с приводом при его прямом ходе.
При движении шатуна 3 далее ролик 21 встречается с упором 20, вследствие чего рычаг 13, поворачиваясь вокруг оси 14, проходит мертвую точку за которой пружина 15 поворачивает рычаг 13 в сторону, противоположную движению водила 4. При этом палец 17, скользя по пазу 16 рычага 13, перемещает тягу 18, а вместе с ней и собачку 9, прерывая контакт последней с упором 12. При подаче команды на возврат привода в исходное положение шатун 3 начинает перемещаться влево, увлекая за собой водило 4 и собачки 8 и 9. Собачка 9 выведена из взаимодействия с храповым колесом 6, а собачка 8 скользит по поверхности колеса, не вызывая его перемещения назад Для того, чтобы усилие трения, возникающее при перемещении собачки 8 по храповому колесу, не сдвинуло его с позиции, предусмотрена собачка 22 .
Как только ролик 21 вступает в контакт с упором 19, рычаг 13 поворачивается вокруг оси 14, а пружина 15 возвращает рычаг 13, а вместе с ним и собачку 9 в исходное попожение.
Формула изобретения
Устройство для шагового перемещения, содержащее. ОСНОР,ШПС и установленные на нем привгщ, выходной вал,
жестко связанное с ним храповое колесо, два упора, размещенное между ними водило, подвижно связанное с выходным валом и приводом и собачку, шарнирно установленную на водиле и предназначенную для взаимодействия с храповым колесом, отличающееся тем, что, с целью повышения надежности, устройство снабжено дополнительной собачкой, установленной на одной оси с основной и предназначенной для предотвращения поворо
та храпового колеса в сторону холостого хода, размещенным на оси шарнира, соединяющего водило с приводом, двуплечим рычагом с пазом на одном плече, пружиной, соединяющей другое плечо рычага с осью собачек, тягой, шарнирно связанной одним концом с дополнительной собачкой, и закрепленным на другом конце тяги пальцем, размещенным в пазу двуплечего рычага, а упоры предназначены для взаимодействия с двуплечим рычагом.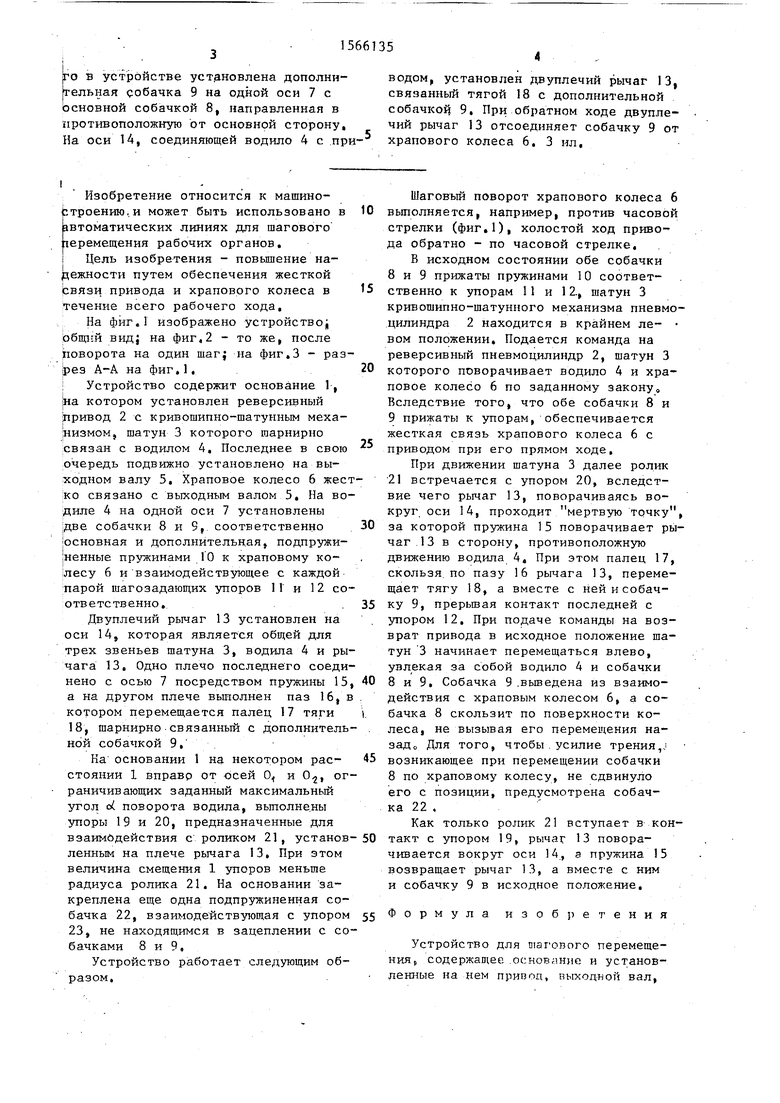
| название | год | авторы | номер документа |
|---|---|---|---|
| Установка для накопления кирпичей с зазором | 1985 |
|
SU1284836A1 |
| Автомат-укладчик плит | 1983 |
|
SU1138330A1 |
| Привод шаговых перемещений | 1990 |
|
SU1778048A1 |
| Ткацкий автомат для выработки бортовой ткани | 1960 |
|
SU137470A1 |
| Роторно-конвейерная линия | 1983 |
|
SU1135608A1 |
| Установка для накопления кирпичей с зазором | 1986 |
|
SU1402432A2 |
| Реверсивный храповой механизм | 1977 |
|
SU771389A1 |
| Конвейер-накопитель для длинномерных изделий | 1985 |
|
SU1316940A1 |
| Устройство для шагового перемещения исполнительного органа установки для подачи материала в зону обработки | 1987 |
|
SU1433586A1 |
| Устройство для выгрузки кормов из башен | 1984 |
|
SU1192716A1 |
Изобретение относится к машиностроению и может быть использовано в автоматических линиях для шагового перемещения рабочих органов. Целью изобретения является повышение надежности путем обеспечения жесткой связи привода и храпового колеса в течение всего рабочего хода. Для этого в устройстве установлена дополнительная собачка 9 на одной оси 7 с основной собачкой 8, направленная в противоположную от основной сторону. На оси 14, соединяющей водило 4 с приводом, установлен двуплечий рычаг 13, связанный тягой 18 с дополнительной собачкой 9. При обратном ходе двуплечий рычаг 13 отсоединяет собачку 9 от храпового колеса 6. 3 ил.
/ М / Д Я Я
11
ю
Фиг.2
| Авторское свидетельство СССР № 916167, кл0 В 23 К 37/04, 1982. |
