Изобретение относится к электромеханике и может Использоваться при создании электрических исполнительных элементов автоматических устройств.
Известен электропривод, содержащий укрепленный в корпусе электродвигатель с полым ротором и эксцентриковую гайку с кольцевой нарезкой, находящуюся в защеплендаи с винтовой нарезкой щтока.
Однако такой электропривод не позволяет обеспечить высокую редукцию и плавность работы на малых скоростях. Кроме того, он содержит большое число кинематических звеньев и имеет значительные габариты. Это снижает точностные и энергетические показатели привода.
В предлагаемом электроприводе с целью повышения энергетических показателей, точности и плавности поступательного перемещения применена дополнительная гайка, образующая вместе с указанной гайкой эксцентриковую пару, закрепленную внутри ротора, снаружи которого размещена вторая пара эксцентриковых гаек, находящаяся в зацеплении с внутренней винтовой нарезкой корпуса, отличающейся по направлению и шагу от нарезки штока, причем каждая пара эксцентриковых гаек смещена одна относительно другой в радиальном направлении.
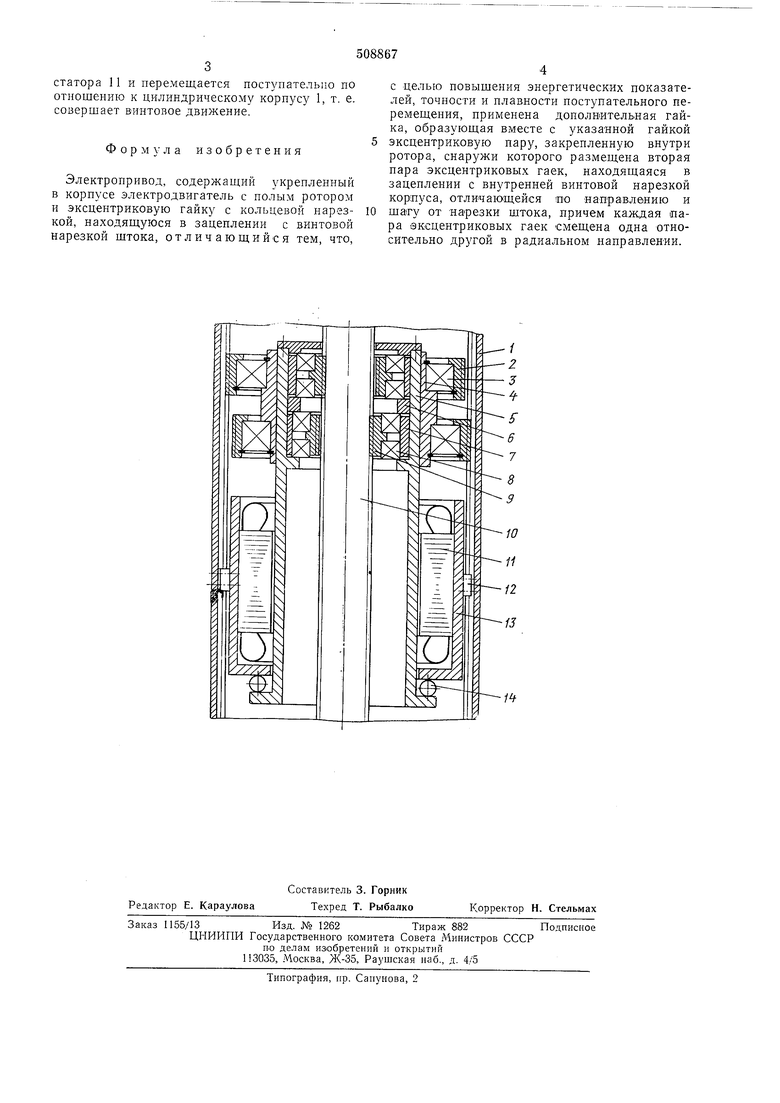
На чертеже показан предлагаемый привод, продольный разрез.
Электроприводсостоит из цилиндрического корпуса 1 с внутренней винтовой нарезкой; входящего с ней в зацепление блока планетарных гаек 2, имеющих наружную кольцевую нарезку и опор качения 3; двухэксцентриковой втулки 4, жестко связанной с вращающимся ipOTOpOM 5; распорной втлл.ки 6; обоймы подшипников 7; опоры качения 8; блока планетарных гаек 9, имеющих внутреннюю кольцевую нарезку и входящих в зацепление с ходовым винтом 10; статора 11; щпонок 12; корпуса электродвигателя 13 и упорного подщипника 14.
При вращении ротора 5, а с ним и двухэксцентриковой втулки 4, наружный блок гаек 9, находящийся в зацеплении с резьбой корпуса 1 и ходовым винтом 10, совершает планетарное движение относительно корпуса и ВИнта. Так как резьбы корпуса и ходового винта имеют различные направления и щаг, то направления осевых перемещений областей контакта по резьбам корпуса и винта также различные. Вследствие этого двухэксцентриковая втулка 4 и зафиксированные на ней от осевого перемещения блоки гаек 2 и 9 перемещаются по резьбе корпуса 1 в одну сторону, а ходовой винт 10 - в противоположную. При этом суммарное перемещение ходового винта 10 относительно корпуса 1 равно разности этих перемещений. Ротор 5 электродвигателя в этом случае вращается относительно
статора 11 и перемещается поступательно по отношению к цилиндрическому корпусу 1, т. е. совершает винтовое движение.
Формула изобретения
Электропривод, содержаш;ий укрепленный в корпусе электродвигатель с полым ротором и эксцентриковую гайку с кольцевой нарезкой, находящуюся в зацеплении с винтовой нарезкой щтока, отличающийся тем, что,
с целью повышения энергетических показателей, точности и плавности поступательного перемещения, применена дополнительная гайка, образующая вместе с указанной гайкой эксцентриковую пару, закрепленную внутри ротора, снаружи которого размещена вторая пара эксцентриковых гаек, находящаяся в зацеплении с внутренней винтовой нарезкой корпуса, отличающейся по направлению и щагу от нарезки штока, причем каждая пара эксцентриковых гаек смещена одна относительно другой в радиальном направлении.
| название | год | авторы | номер документа |
|---|---|---|---|
| Планетарная винтовая передача качения | 1990 |
|
SU1772491A1 |
| РОЛИКО-ВИНТОВОЙ МЕХАНИЗМ | 2016 |
|
RU2631096C1 |
| Электромеханический привод поступательного действия | 2022 |
|
RU2786248C1 |
| Редуктор-шарнир | 2017 |
|
RU2663030C1 |
| Винтовой механизм | 1989 |
|
SU1747771A1 |
| Станочные тиски | 1975 |
|
SU768621A1 |
| Планетарная передача винт-гайка качения | 1979 |
|
SU916828A1 |
| Электрический привод | 1986 |
|
SU1352140A1 |
| Домкрат | 1973 |
|
SU463627A1 |
| МЕХАТРОННЫЙ МОДУЛЬ ЛИНЕЙНОГО ПЕРЕМЕЩЕНИЯ | 2007 |
|
RU2351817C1 |
/
