Изобретение относится к тому типу переменных передач, в которых в качестве промежуточного элемента применен стержень, средняя часть кототорого связана с некоторой инерционной массой, а концы шарнирно сочленены с дисками на некотором расстоянии от их центров, причем диски посажены на ведущий и ведомый валы, расположенные по одной геометрической оси. При вращении стержня инерционная масса движется по некоторой траектории и одновременно является для стержня как бы упругой опорой.
При отсутствии нагрузки на редомом валу инерционная масса благодаря центробежной силе, возникающей при ее движении по траектории, стремится уравнять численно обороты ведущего и ведомого валов. При появлении на ведомом валу нагрузки инерционная масса благодаря той же центробежной силе преодолевает эту нагрузку и поддерживает обороты ведомого зала в соответствии с величиной приданной ему нагрузки.
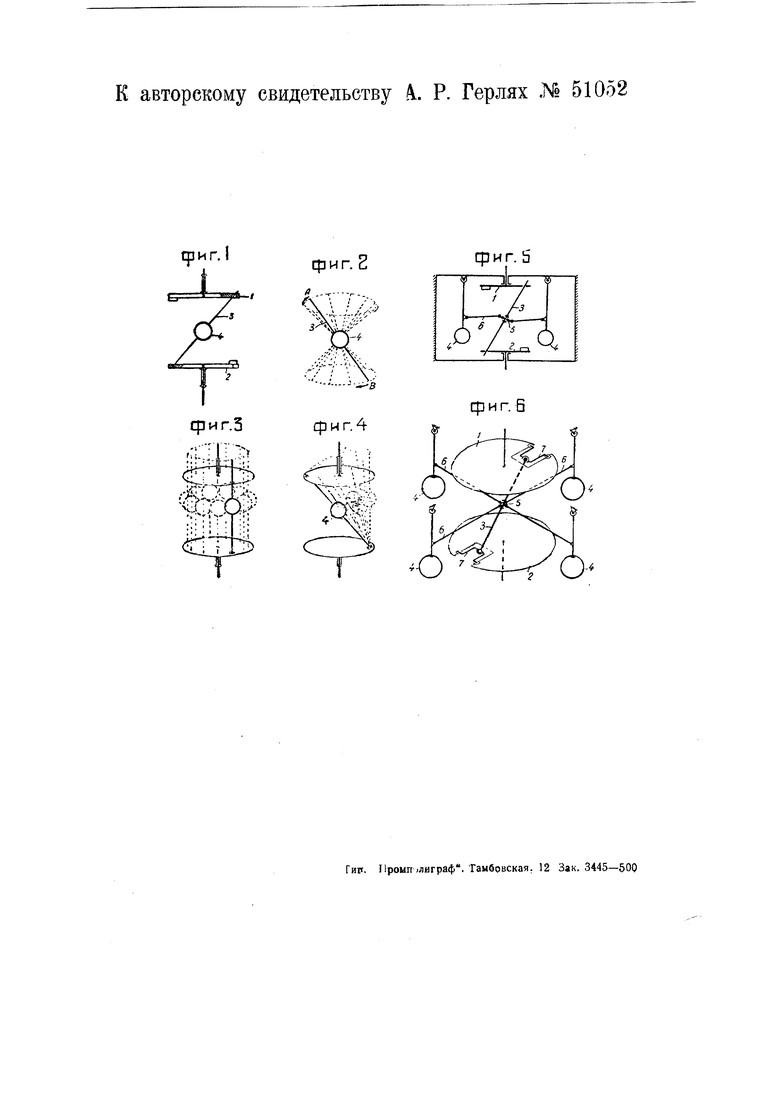
На чертеже фиг. 1 изображает схематично механизм переменной передачи; фиг. 2, 3 и 4 схемы, поясняющие работу механизма; фиг, 5 и 6-
варианты выполнения механизма переменной передачи.
Механизм переменной передачи состоит из двух дисков / и 2 (фиг. 1), посаженных на ведущий и ведомый валы, расположенные по одной прямой. Диски 1 к 2 сочленены между собой стержнем 3, имеющим на некотором расстоянии от центров их щарниры-щаровой на диске 2 и скользящий, допускающий возвратно-поступательное движение стержня вдоль своей оси, - на диске /. Стержень 3 в своей средней части несет укрепленную на нем инерционную массу 4.
Принцип работы механизма состоит в том, что если концу А стержня 3 (фиг. 2) придать вращательное движение, то масса , благодаря инерции будет стремиться сохранить состояние покоя, создавая этим как бы упругую опору для стержня. Д ижение будет передаваться концу В стержня, который начнет вращаться в ту же сторону. Если сочленить теперь конец А стрржня с диском /, а конец В с диском 2, как указано было выше, то будем иметь схему механизма, представленную на фиг. 1.
При нагрузке на ведомом валу, равной нулю, диск 2 станет вращаться,
увеличивая число оборотов до тех пор, пока оно не сравняется с числом оборотов ведущего диска /. Тогда движение будет установившимся, и кинематическая схема примет вид, показанный на фиг. 3. Под влиянием центробежных сил траектория, описываемая инерционной массой, превратится в окружность максимально возможного радиуса, лежащую в плоскости, перпендикулярной к оси валов. Если теперь на ведомый вал дать нагрузку, по величине бесконечно больщую, то диск 2 остановится. Движение будет происходить по схеме, показанной на фиг. 4. В этом случае траекторией движения инерционной массы будет являться эллипс, лежащий в плоскости, наклоненной к геометрической оси валов. Благодаря этому возникают инерционные силы, создающие на ведомом диске 2 крутящий момент максимальной величины. Таким образом, появление на ведомом валу нагрузки вызывает уменьшение числа оборотов этого вала до тех пор, пока нагрузка не уменьшится.
Переход из одного состояния в другое через ряд промежуточных положений происходит плавно и непрерывно, так что ведомый вал может вращаться с любым числом оборотов.
На фиг. 5 представлена схема видоизмененного механизма, в котором применены две инерционных массы 4, качающиеся на плечах около неподвижных опор. Втулка 5, свободно насаженная на срелнюю часть стержня 3, сочленена с массами 4 помощью серег 6, щарнирно соединенных с одной
стороны с втулкой 5, а с другой - с качающимися плечами, на которых подвешены массы 4.
При этом шаровой шарнир в диске 2 заменен скользящим шарниром.
Другая схема видоизмененного механизма, представленная на фиг. 6, исключает для уменьщения трения применение скользящих шарниров. В этом случае сочленение стержня 3 с дисками 7 и 2 осуществлено при помощи щаровых шарниров, помещенных на кривошипах 7, поворачивающихся на дисках / и 2.
Предмет изобретения.
1.Механизм переменной передачи, отличающийся тем, что сопряжение коаксиально расположенных ведущего и ведомого г алов осуществлено при помощи стержня с инерционной массой, щарнирно сочлененного своими концами с обоими валами на некотором расстоянии от их общей геометрической оси и могущего совершать вдоль своей оси возвратнопос пательное движение в шарнире по крайней мере одного из своих концов.
2.Форма выполнения механизма по п. 1, отличающаяся тем, что инерционная масса 4 расположена непосредственно на стержне 5.
3.Форма выполнения механизма по п. 1, отличающаяся тем, что инерционные массы 4 расположены на плечах, качающихся около неподвижных опор и щарнирно сочлененных при помощи серег 6 со втулкой 5, поворотно насаженной на среднюю часть стержня 5.
фиг, 1
фиг. S
фиг. 4
ф и г. 6
-4
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления работой табуляторных, счетных и т.п. машин | 1927 |
|
SU12239A1 |
| ГИДРАВЛИКО-ИНЕРЦИОННЫЙ ПРЕОБРАЗОВАТЕЛЬ, СИСТЕМА УПРАВЛЕНИЯ ИМ, КОРОБКА ПЕРЕМЕНЫ ПЕРЕДАЧ И СПОСОБ ПРЕОБРАЗОВАНИЯ ИМИ КРУТЯЩЕГО МОМЕНТА | 2003 |
|
RU2259282C2 |
| Переменная передача | 1937 |
|
SU53548A1 |
| Транспортное средство Арзамасцева с ножным и механическим приводом накопительной энергии | 2019 |
|
RU2749430C2 |
| Переменная передача | 1934 |
|
SU43525A1 |
| Передача между коаксиальными валами с автоматическим изменением передаточного отношения | 1930 |
|
SU47984A1 |
| Устройство для кладки кирпичных стен | 1974 |
|
SU772489A3 |
| РАБОЧИЙ ОРГАН ГОРНОГО ОЧИСТНОГО КОМБАЙНА | 1991 |
|
RU2009315C1 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 2002 |
|
RU2237175C2 |
| РОТОРНАЯ МАШИНА | 1997 |
|
RU2135777C1 |