1
Изобретение отноеитея к ме.ханически. передачам и может быть применепо при сооданип тихоходны.ч н бесшумных передач для приборов н уетройств автоматики.
Известна волновая пе)едача, генератор которой выполнен в 1-л1де мап итострпкцнонных нластип, закрепленных lia новерхр.остп гнбкого элемента и содсржа1цих управляющую об.мотку. Недостатка.мн такой передачи явл поуся сложность регулирования скороегн вра1цення выходного вала, большой шум, соизмеримый е уровнем шумов электрических , отсутствие самоторможения и передача сравпительпо пизких крутяи|их моментов.
С целью обеспечения бесшулпюстп работы н самоторможепня, а также получения крайне малых плавнорегулпруе.ых екористе врапдеиия выходного вала, генератор выпо.чнеп в виде диаметралыю протпвоположных отноептельно оеи вращения выходного вала или неекольких пар з.чектрокагревателсй держателя, закрепленного па корпуее к и.х еглцего наклонные к оси выходного ва.ча ггазы. и стержней, однп концы которых .чеиы жестко или игарнирно на держателе, а другие установлены в наклонных пазах держателя п взаимодействуют с гибким колесом передачи.
Такое выполнение передачи позволяет нлавло регулировать скорость передачи за счет ре2
г лнрования си.-:ы тока в нагревательных эле.iCHTax. обеспечить бесшумную работу, самоторможение, возможность передачи больших кр.тяп.игх MOAjen. го:; (на два порядка выше,
че.м у известньгх передач), плавность врап1.ения выходного вала вследствие высокой инерционности тен.ювых процессов, что предопре;и:. :-:ет примените передачи для созданпя ма. .ivOiKXTeu.
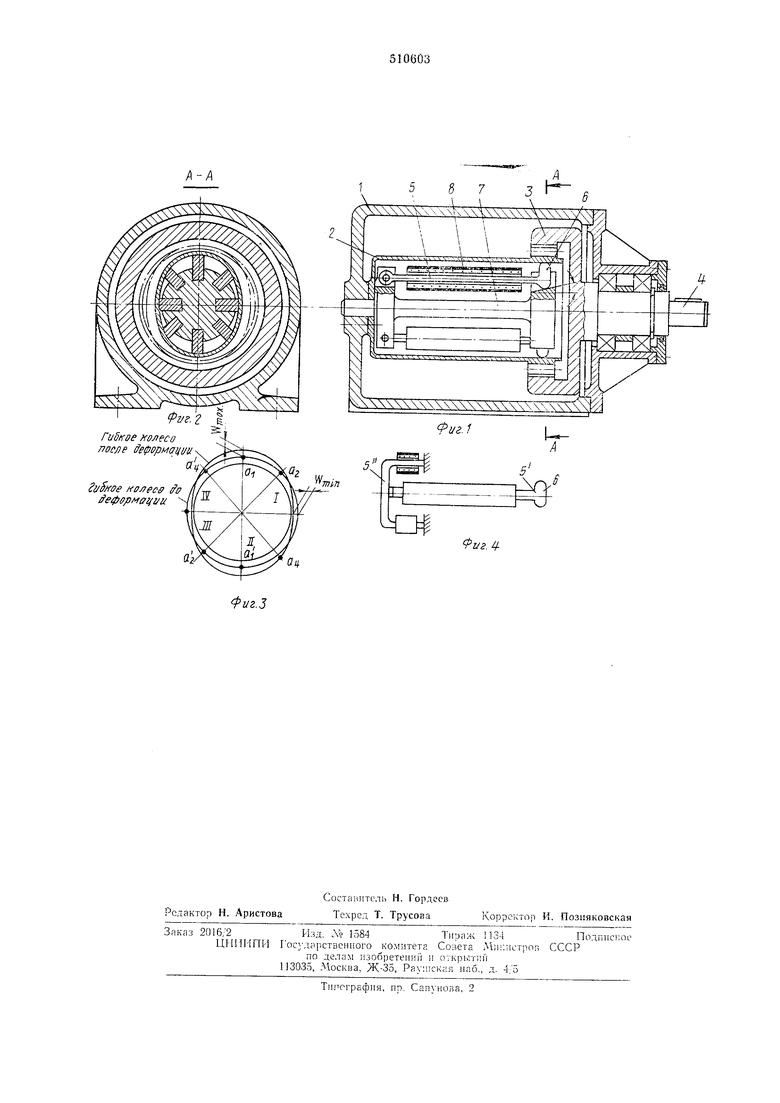
Па фиг. 1 изображена пред.чагаемая передача, продольный разрез; на фиг. 2 - разрез rio А--А па фиг. 1; на фпг. 3 - схема дефор..ии г бкого колеса; на фиг. 4 - вариант 1ч::1:стр Х,п TO.iKiuoHiero стержпя генератора
о электронагрс,)ол.
Волновая нере.лача состоит из корпуса 1, гибкого Kri.ieca. 2, закрепленного па корпусе 1. : ecткoгo колеса 3, соединенного е выходчь;:, валол 4. стержне 5, радпальпые толка:Ч.::; О ;oioj:b x р: с:;оложе Ы в наклонных паi-;ix де|1;г;а7е. 7, закренленпого па корпусе 1. ::лсктоона )евате. 8, нредставля опд,их собой
::Т;Х;;ОУ10 уЮ С ИралЬ, 1рОВаНПу Ю ОТ КОр:;, j;; 1 и (vr cTej i/xre ; 5. Стержни 5, выполнепIbu 3 .,;;nvpu;5/ia, обладаклцего больпшм колчЬфмцмснтом (папрн; icp, из алк) или латун), .чевымн своим;; концами жестко ijap inpno закреплег:Ь на держателе 7, так что возможен их некото- ь 1оворот В раднальной плоскости Зс.
счет шарнирной связи либо за счет упругой деформации.
Форма деформированного гибкого колеса определяется при геометрическом расчете передачи и в дальнейшем считается известной, то есть известны все величины радиальпых деформаций гибкого элемента для каждого углового положения толкателя.
Работа.передачи происходит следующим образом.
В исходном положении гибкое колесо - недеформированное (круглое), все стержни 5 { аходятся в «холодном состояним и имеют температуру /о окружаюш,ей среды. Толкатели 6 располагаются по окружности так, что между ними и стенкой гибкого колеса образуется равномерный зазор, который должен быть равен деформации Wmi-,i гибкого колеса по малой оси (см. фиг. 3).
Для пуска передачи подключаются к источнику питания два диаметрально противоположных электронагревателя 8, а имеппо Сь al (для ускорения процесса пуска нагрев в начале может быть деформироваииым). В результате нагрева соответствующих электронагревателям стержней 5 до некоторой температуры 1 автоматически от термопар или датчиков пути включаются две следующие нары электронагревателей (а и az или а и а4) со стержнями симметрично расположенных относительно первой пары стержней, температура которых соответствует моменту включения следующей пары электронагревателей.
/, /о + Д/...,(1)
.Г,1Г,
/...tgv
где Wj и W - расчетная радиальная деформация гибкого колеса, ирнчем Wi W,,,n,v максимальная расчетная радиальная дефор мация гибкого колеса;
/ - длина стержней 5;
а -- коэффициент линейного расширения материала стержней;
Y - угол наклонных поверхностей ;1,ержатсля (см. фиг. 1).
С аналогичным запаздыванием происходит включение нагрева следующих пар электронагревателей и т. д. В результате этого к концу периода пуска гибкое колесо будет ,;1еформи)овано но расчетной кривой.
Работа передачи начинается сразу как только радиальная деформация гибкого колеса достигает Wmax- В этот момент срабатывает датчик температуры или пути, в результате электронагреватели Оь al стержней, а также всех других стерлсией, расположенных в данный период в квадрантах IV и II (при «враи;ении генератора но часовой
стрелке) или в квадрантах 1 и П (при противоположном направлении «вращения генератора), отключаются от сети и эти стержни начинают сокращаться; электронагреватели Остальных стрежне; продолжают расширяться. Когда деформация под стержнями (в зависимости от иаправления «вращения генератора) достигнет величины W-max: онисанный процесс повторяется. При этол: происходит обкатывание зубчатых 1 енцов и вращение жесткого колеса передачи.
CKOpocTij врап1,епия этого колеса бесстуисн|ато ,тируется сопротивлениями в цеии ,;лект)онагревателей и л ожег очень пе имсокой. Для ограничения колебаний этой
скорости в допустимых пределах может бьт
иредуслютрена соответствукчцая обратная
)х
Дл;, обсспечег;ия по;1иой 6ecniv: uiocT;i не;)сдачи питание электронагревателей должно о. хществляться постоянным 1Ч)ком.
Д,чя надежной работы передачи ус1ановившаяся температура окружающей среды должна быть иостояииой.
С целью регулирования величины скорости перемещения толкателей 6 (главным д;;и ускорения отвода зубьев гибкого колеса, 131.1ходящих из зацепления) стержни о могут (см. фиг. 4) иметь дополнительные электронагреватели, включение которых вызывает от.:;:д то.чкателей 6. Участок 5 стержня тер.моизо;1ировап от центральной части 5 стержня.
Для остановки передачи достаточпо вык.лючить питание все.х нагревателей. Для удержа1П я передачи в рабочем состоянии, папример при кратковремеипой ocTanoBice, нита)П1е электронагревателей переключается па П1 ерывистый режим. В этом случае все электронаг)сватели получают питание в течение 1- -3 сек.
.- uiTCM па такое же :5ык;11оча1отси.
ср о р м ;i а и з о о р с т е и и я
Бо, 1101, передача, содержаи1ая корпус, |;1бкое колесо. закреилеп:чое на корпусе, жесткое KO.ieco, закрепленное па вы.ходном валу, и генератор воли, о т л и ч а ю щ а я с я тел:, что, с цель:о обеснечени; бешу.мности заботы и
са.ь)ор.1ожемпя, а также для иолучепия крайне малых пла зпорегу.Л1;) скоростей враiHCHirn вылодпого вала, генерато) вьпюлнеи в виде ;,1 нметра,пл-1о противоположиьгх отиосите.иик. оси враи1епия выходного ba.ia дву.х
или : ескол1)Ких пар элекг эонагрева елей держгле.:, .ьчкреплеииого иа корнхсе и имеюп.1егч; ;йк;и)1П1ые к оси В15;ход ;ого 1,ала лазы, и стержней, одни копиы которых закреплеиы жсст;-:о или иарнирпо на держателе, а другие
стаповлеиы в паклопных пазах и взаимодейvTB -ioT с гибким колесом иередачи.
ruStfoe колесо nocfie ffefiepnaiii/u
2i/Sffoe крлес5 p 1 ефррма1/г/и
| название | год | авторы | номер документа |
|---|---|---|---|
| Волновая передача | 1978 |
|
SU773337A1 |
| Волновая передача | 1980 |
|
SU1036978A1 |
| СПОСОБ КОМБИНИРОВАННОГО НАКОПЛЕНИЯ ЭНЕРГИИ | 2021 |
|
RU2771214C1 |
| ВОЛНОВАЯ ЗУБЧАТАЯ ПЕРЕДАЧА | 2009 |
|
RU2405993C1 |
| Волновая передача | 1987 |
|
SU1437600A2 |
| Кулачковый генератор волновой передачи | 1982 |
|
SU1055935A1 |
| ГЕНЕРАТОР ВОЛНОВОЙ ПЕРЕДАЧИ | 1973 |
|
SU381839A1 |
| Веломобиль | 1986 |
|
SU1399210A1 |
| ТРАНСФОРМАТОР ВРАЩАЮЩЕГО МОМЕНТА | 1999 |
|
RU2188973C2 |
| Устройство для получения вращательного движения Абрамова Валентина Алексеевича (Абрамова В.А.) | 2016 |
|
RU2654690C9 |