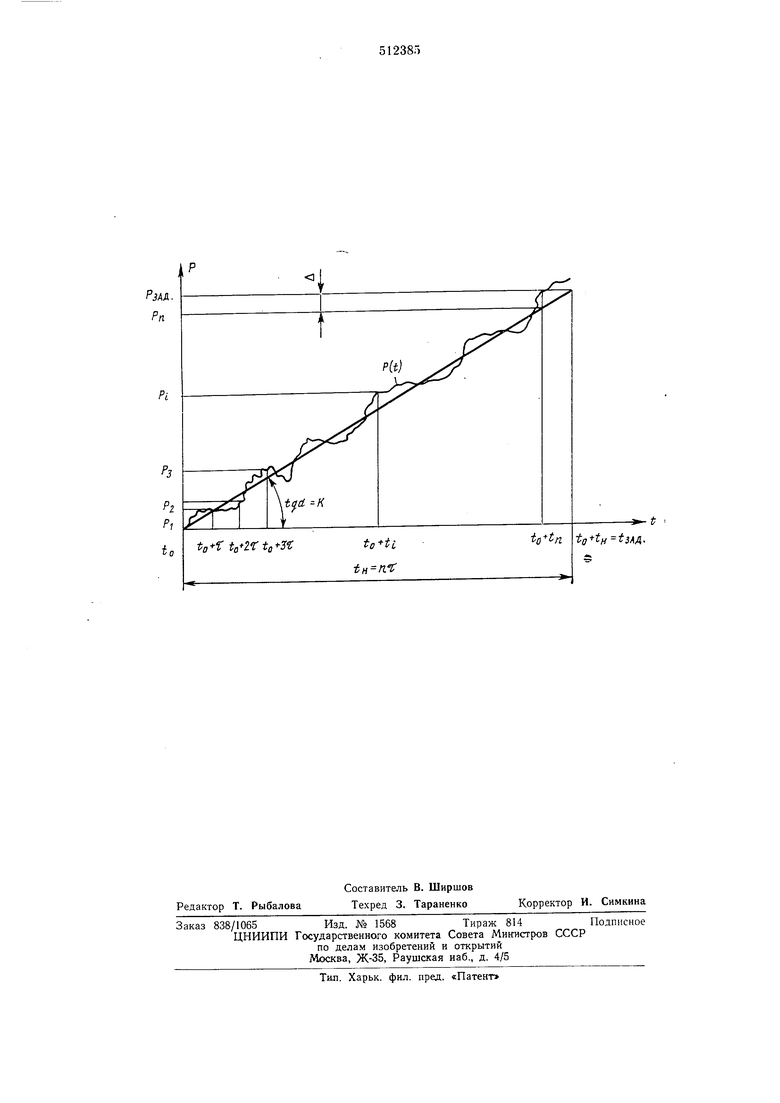
вают с измеренньм значением, которое прёдста;вляется .в виде частных сумм,
{ Pdi V р,- ,
где п - число частных CVMIM, составляЕОщих интеграл;
Pi- результат г-го из:мерения массы; т - интервал времени, через который осуществляется измерение t-ro знач-ения массы.
При осуществлении ionoco6a выполняют следующие операции: прогнозируют в зависимости от измеренной скорости k изменения сигнала датчиков и величины сигнала, пропорционального заданной дозе Рэал время „ : t-Mn - /о - которое необходимо для увеличения си1гнала датчиков под действием массы дозируемого материала до уровтш сигнала, пропорционального заданной дозе, согласно выражению
зад
11
усиливают пропорционально заданной дозе сигнал, соответствующий найденному времели, т. е.
рР зад за л
t,.
непрерывно суммируют сигналы, пропорциональные Pi и равные т PC, вырабатывают командный сигнал на закрытие управляемого затвора лри соблюдении условия
T.iip, i
Предлагаемый способ дозирования позволяет уменьшить среднеквадратическое отклонение, а следовательно и случайную погрешность определения момента лодачи сигнала иа прекращение поступления материала iB
Vli грузотриемное устройство в раз.
Формула изобретения
Способ весового порционного дозирования сыпучих материалов путем за1дания дозы, получения сигнала, пропорционального заданной дозе, подачи дозируемого материала в трузоприемное устройство через управляемый затвор расходного бункера, преобразования массы грузоприемного устройства с дозируемым материалом датчиками в .пропорциональный сигнал, измерения текущего значения скорости изменения этого сигнала, прогнозирования в зависимости от измеренного текущего значения скорости изменения сигнала датчиков и величины сигнала, пропорционального заданной дозе, времени, необходимого для увеличения сигналов датчиков цод действием массы дозируемого материала до уровня сигнала, пр0 порционального заданной дозе, и выработки упреждающего сигнала на управляемый затвор, отличающийся
тем, что, с целью повышения точности дозирования путем уменьшения случайной погрешности определения момента подачи сигнала на за.крытие упра1вляемого затвора, непрерывно суммируют сигнал датчиков, сравнивают полученную сумму с сигналом, пропорциональным .прогнозируемому времени и умноженным на сигнал, пропорциональный половине заданной дозы, и при их равенстве подают комалду .на за.крытие управляемого
затвора расходного бункера.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЕСОВОЙ ПОРЦИОННЫЙ ДОЗАТОР | 1971 |
|
SU422971A1 |
| Весовой порционный дозатор | 1975 |
|
SU515947A1 |
| Автоматический весовой порционный дозатор с цифровым управлением | 1981 |
|
SU1000773A1 |
| Автоматический весовой порционный дозатор | 1984 |
|
SU1186956A1 |
| Устройство для весового дозирования | 1988 |
|
SU1663446A1 |
| Способ весового непрерывногодОзиРОВАНия СыпучиХ МАТЕРиАлОВ | 1979 |
|
SU815516A1 |
| Устройство для весового дозирования | 1980 |
|
SU892227A1 |
| Автоматический порционный дозатор с цифровым управлением | 1987 |
|
SU1439410A1 |
| Устройство управления весовым дискретным дозированием сыпучих материалов | 1986 |
|
SU1425463A1 |
| Цифровое устройство управления многокомпонентным дозированием | 1984 |
|
SU1224600A1 |