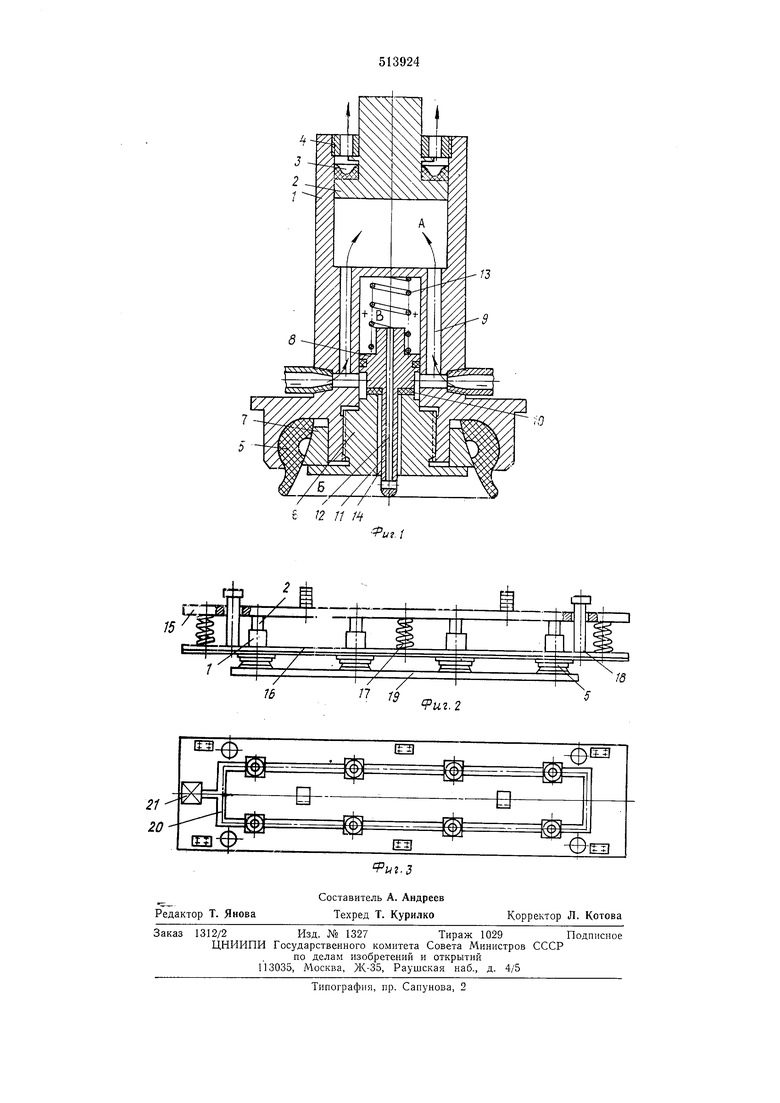
ней раме л естко крепятся штоки поршня 2 захватов, а к нижней - цилиндр 1 захватов, причем камера 5 размеш,ается в нижней части рамы 16 и соприкасается с поднимаемым листом 19. Все вакуумные захваты через отверстия в цилиндре 1 с помощью трубопровода 20 соединены в общую магистраль, на конце которой установлен обратный клапан 21.
Устройство работает следующим образом.
При перемещении устройства винз платформа опускается и камеры 5 захватов соприкасаются с листом 19. Затем нижняя рама 16, встречая сопротивление деформированию упругих камер, приостанавливает частично движение вниз, а верхняя рама 15 с прежней скоростью опускается вниз и сжнмает пружины 17, при этом поршень 2 вытесняет воздух из полости А.
При деформации камер 5 щуп 11 поднимается вверх, клапан 8 выходит из контакта с седлом 10, воздух из полости Б камеры 5 вытесняется по кольцевому зазору 14 к каналам 9 в полость Л и далее через манжеты 3 удаляется в атмосферу. При движении поршня вверх воздух вытесняется из полости Б и далее через отверстие 12 щупа 11 уходнт в камеру 5 и затем по кольцевому зазору 14, каналам 9 в полость Лив атмосферу. В этот момент во всех захватах и трубопроводе устанавливается атмосферное давление.
При подъеме верхней рамы 15 нижняя рама 16 остается на месте, так как она прижата пружинами 17. Вместе с рамой 15 поднимаются поршни 2 захватов, так как штоки поршня закреплены на этой раме, а цилиндры 1 захватов, скреплепные с рамой 16, стоят на месте. Ввиду того, что обратный клапан 21 трубопровода закрыт и воздух из захватов ранее удален, при подъеме верхней рамы 15 во всей системе захватов (у которых поднят щуп, то есть он соприкасается с листом) и в трубопроводе создается вакуум, и лист присасывается к присоскам.
Устройство поднимается вверх, перемещается в горизонтальной плоскости и устанавливается над листом, затем устройство опускается, открывается обратный клапан 21 трубопровода 20, воздух поступает в трубопровод.
девакуумпруются захваты и лист освобождается.
При захвате листов меньшего размера, то есть когда часть захватов не накладывается
на лист, вакуум в действующих захватах не нарушается за с ;ет того, что неработающие захваты автоматически отключаются.
В этом случае удаление воздуха из действующих захватов и создание вакуума производится как и в нервом случае, но в той части захватов, которые не накладываются на лист при поднятии верхней рамы вверх щуп 11 не поднимается и клапан закрывает седло 10, при этом в полости В создается атмосферное давление, а в камерах действующих захватов и в трубопроводе вакуум.
Прижатие клапана 8 к седлу 10 в этом случае первоначально производится пружиной 13 и далее, после создания вакуума в трубопроводе, дополнительно за счет перепада давления в нолости В и трубопроводе. Такой способ прижатия клапана к седлу, за счет разности перепада давления в полостях, позволяет сохранить макси.мально большую подъемную
СИЛУ захватов.
Формула изобретения
1. Вакуумное грузозахватное устройство для нлоских изделий, содержащее раму с размещенными на ней безнасосными поршневыми вакуумными захватами, о т л и ч а ющееся тем, что, с целью увеличения диапазона габаритов транспортируемых изделий, над рамой с вакуумными захватами установлена вторая рама, между которыми расположены нружины, причем верхняя рама соединена с поршнями, а нижняя с цилиндрами
захватов, которые соединены трубопроводом в общую вакуумную систему.
2. Устройство по п 1, отличающееся тем, что вакуумные захваты снабжены предохранительными клапанами, выполненными
в виде подпружиненных щунов с продольными отверстиями, которые верхней частью соединены с атмосферой, а нижней сообщены с вакуумной магнстралью.

| название | год | авторы | номер документа |
|---|---|---|---|
| Вакуумное грузозахватное устройство | 1980 |
|
SU906888A1 |
| Вакуумный захват для транспортирования металлических листов | 1980 |
|
SU1092119A1 |
| Грузозахватное устройство | 1988 |
|
SU1615129A1 |
| Вакуумное устройство для подачи листов | 1977 |
|
SU726802A1 |
| Вакуумный захватный орган | 1982 |
|
SU1107937A1 |
| Установка для испытания образцов на длительную прочность | 1988 |
|
SU1580216A1 |
| Грузозахватное устройство | 1982 |
|
SU1017639A1 |
| Приспособление для очистки рельсов от песка | 1939 |
|
SU56690A1 |
| ПНЕВМОВИБРАЦИОННЫЙ АГРЕГАТ ДЛЯ ПЕРЕКАЧКИ И ФИЛЬТРОВАНИЯ РАЗЛИЧНЫХ ЖИДКОСТЕЙ | 1997 |
|
RU2117515C1 |
| Установка для трехосных испытаний грунтов статическими и динамическими нагрузками | 1988 |
|
SU1642305A1 |