к
00
Изобретение относится к холодной обработке металлов давлением и может быть использовано для поштучного отделения плоских заготовок от стопы и подачи их в рабочую зону пресса.
Известен вакуумный захватный орган, содержащий подвижный вдоль продольной оси корпус, имеющий вакуумную камеру и полую присоску, соединенную с вакуумной камерой, расположенный в полости корпуса и подпружиненный относительно него шток с центральным отверстием, связывающим полость присоски с атмосферой, закрепленный на штоке клапан, перекрывающий центральное отверстие и снабженный механизмом управления. Клапан выполнен в виде установленного перпендикулярно продольной оси штока конического валика со сквозным отверстием, параллельным поперечной оси валика, а механизм управления выполнен в виде храпового колеса, закрепленного на валике и двух собачек, одна из которых шарнирно закреплена на штоке и подпружинена к храповому колесу, а другая шарнирно закреплена на корпусе с возможностью периодического взаимодействия с храповым колесом 1.
В указанном захватном органе шток с центральным отверстием, связываюш,им полость присоски с атмосферой, и клапаном, закрепленным на нем, расположен в полости полого корпуса, подвижного вдоль своей оси, причем, шток подпружинен относительно корпуса и подвижен вдоль его оси. При таком выполнении вакуумного захватного органа при обратном ходе полого корпуса вакуум присоски создается за счет перемещения штока под действием пружины бдоль оси полого корпуса. Величина вакуума, создаваемого в полости, зависит от величины перемещения щтока и от усилия пружины, действующей на шток. Перемещение листа производится при максимально возможной величине вакуума в полости вакуумной присоски. При перемещении возможна подтечка воздуха в полость вакуумной присоски из-за дефектов поверхности листа (трещины, царапины, загрязнения) в месте касания вакуумной присоски с поверхностью листа. Кроме того, подтечка воздуха возможна из-за наличия подвижных соединений в захватном органе (штока с корпусом, валика со штоком). При нарушении герметизации в полости присоски шток под действием пружины перемеш,ается вверх относительно полого корпуса, а вместе с ним и вакуумная присоска с листом, т. е. лист занимает относительно полого корпуса новое положение, следовательно, меняется и его положение относительно приемного устройства, например, транспортирующих валков пневмоподачи, что может привести к невыполнению последующей операции, т.е. ненадежной работе устройства.
Известен вакуумный захватный орган, содержащий подвижный вдоль оси держатель, подпружиненный относительно держателя, полый с присоской, расположенный в
полости корпуса шток-поршень с центральным отверстием, связывающий полость присоски с атмосферой, механизм управления и механизм разгерметизации, включающий в себя прямой клапан, состоящий из корпуса
0 и подпружиненного к нему поршня с центральным отверстием, и обратный клапан состоящий из закрепленного на поршне корпуса и расположенного в нем подпружиненного щарика, перекрывающего центральное отверстие в поршне, при этом механизм уп5 равления выполнен в виде неподвижного упора, расположенного над держателем, и датчика, закрепленного на держателе с возможностью взаимодействия с корпусом захватного органа, шток-поршень закреплен неподвижно на держателе, а корпус прямого клапана закреплен на держателе с возможностью взаимодействия корпуса обратного клапана с неподвижным упором 2.
В таком вакуумном захватном органе полый с присоской шток-поршень с централь5 ным отверстием, связывающий полость присоски с атмосферой, расположен в полости корпуса, подпружиненного относительно держателя. Поэтому при обратном ходе держателя вакуум в полости присоски создается за счет перемещения щток-поршня под дей ствием пружины вдоль оси полого корпуса.. Вакуум, создаваемый в полости присоски, зависит от величины перемещения штока и от силы упругости пружины, действующей на шток. Вовремя перемещения листа возможно нарушение герметичности из-за де5 фектов поверхности листа (трещины, царапины, загрязнение) в месте касания вакуумной присоски с поверхностью листа. Кроме того, нарушение герметизации возможно изза наличия подвижных соединений в захвато ном органе (шток-поршня с полым корпусом, поршня прямого клапана и держателя) и сопрягаемых поверхностей в прямом и обратном клапане.
При нарушении герметизации в полости присоски шток-поршень под действием пру5 жины перемещается вверх относительно полого корпуса. Вместе с этим изменяется положение относительно присоски с листом, т.е. и положение листа относительно приемного устройства (например, транспортирующих валков, пневмоподачи), что может привести к невыполнению последующего цикла работы и, следовательно, к ненадежной работе устройства.
Наиболее близким к предлагаемому rto технической сущности и достигаемому эф5 фекту является вакуумный захватный орган, содержащий подвижный вдоль продольной оси держатель, закрепленные на нем корпус с вакуумной камерой, полую присоску, соединенную с камерой, и узел создания разрежения в вакуумной камере 3.
Недостатком известного вакуумного захватного органа является низкая надежность работы.
Цель изобретения - повышение надежности работы.
Поставленная цель достигается тем, что в вакуумном захватном органе, содержащем подвижный вдоль продольной оси держатель закрепленные на нем вакуумную камеру соединенную с полой присоской, и узел создания разрежения в вакуумной камере, камера выполнена из эластичного материала, узел создания разрежения выполнен в виде упругого элемента, расположенного в полости камеры с возможностью взаимодействия с ее боковыми стенками, и силовых цилиндров со штоками, размещенных по обе стороны камеры с возможностью взаимодействия штоков с ее боковыми стенками.
Камера выполнена из двух частей, связанных между собой.
Упругий элемент выполнен в виде пружины.
На чертеже изображен вакуумный захватный орган, в разрезе.
Вакуумный захватный орган состоит из подвижного вдоль продольной оси держателя 1, на котором закреплена эластичная вакуумная камера 2, состоящая из двух эластичных мембран 3 и 4, прижатых к вертикальной стенке держателя 1 крышками 5 и 6. В вертикальной стенке держателя 1 в листе установки мембран 3 и 4 выполнено отверстие 7, соединяющее полости мембран, внутри эластичной вакуумной камеры 2 помещена предварительно деформированная пружина 8, опирающаяся на щайбы 9 и 10, контактирующие с внутренней поверхности мембраны 3 и 4. На держателе I смонтированы два силовых цилиндра 11 и 12, имеющих возможность взаимодействия с пружиной 8 через эластичные мембраны 3 и 4. Вакуумная присоска 13, закрепленная на держателе 1, соединяется посредством канала 14 с вакуумной камерой 2. Для контроля нижнего положения держателя 1 относительно стопы листов 15 (заготовок) служит датчик 16, установленный на держателе 1.
Вакуумный захватный орган работает следующим образом.
Держатель 1 устанавливается над стопой листов 15. Подается команда от датчика (не показан) на срабатывание пневмоцилиндров 11 и 12. При этом штоки пневмоцилиндров 11 и 12 через .мембраны 3 и 4, шайбы 9 и 10 сжимают пружину 8, вытесняя воздух из камеры 2 через канал 14.
0
Держатель 1, двигаясь вниз, вакуумной присоской 13 касается стопы листов 15. Держатель 1, продолжая опускаться, вытесняет воздух из полости присоски 13 благодаря деформации последней. После этого
5 датчик 16, касаясь стопы листов 15, подает команду на включение силовых цилиндров 11 и 12. Поршни цилиндров 11 и 12 перемещаются в направлении от вакуумной камеры освобождая пружину 8. Пружина 8, разжимаясь, действует через щайбы 9 и 10 на .мембраны 3 и 4. Объем камеры 2 увеличивается, а в полости присоски 13 возрастает вакуум до величины, обеспечивающей прижатие листа к эластичной присоске, достаточное для удержания его на период перемеще5 ния к приемному устройству (не показано). После этого подается сигнал от датчика (не показан) на привод держателя 1. При подаче листа к приемному устройству подается вновь команда на включение силовых цилиндров 11 и 12, которые сжимают пру0 жину 8, и вакуум снимается. Лист 15 освобождается от воздействия эластичной присоски 13 и захватывается приемным устройством. В случае нарушения герметичности в камере присоски из-за дефектов поверхности листа (трещины, царапины, загрязне5 ние) в месте касания вакуумной присоски с поверхностью листа пружина 8 разжимается дополнительно на какую-то величину, объем камеры 2 увеличивается и величина вакуума остается постоянной. Положение
0 листа 15 относительно держателя I не меняется, а следовательно, не меняется и его положение относительно приемного устройства.
Экономический эффект от использования предлагаемого изобретения 684 р. в год.

| название | год | авторы | номер документа |
|---|---|---|---|
| Вакуумный захватный орган | 1980 |
|
SU925820A1 |
| Вакуумный захватный орган | 1980 |
|
SU912617A1 |
| Вакуумный захватный орган | 1980 |
|
SU904846A1 |
| ВАКУУМНЫЙ ЗАХВАТНЫЙ ОРГАН | 1972 |
|
SU342712A1 |
| Вакуумный захватный орган | 1981 |
|
SU1005996A1 |
| Вакуумный захватный орган | 1977 |
|
SU644579A1 |
| Вакуумный захватный орган | 1985 |
|
SU1294434A1 |
| Вакуумный захват перегрузочного устройства | 1983 |
|
SU1100213A1 |
| Вакуумный захватный орган | 1981 |
|
SU963639A1 |
| Вакуумный захватный орган | 1980 |
|
SU946743A1 |
1. ВАКУУМНЫЙ ЗАХВАТНЫЙ ОРГАН, содержащий подвижный вдоль проJjrf-.njQ3IT S 13 - .;::.„,: b. Н1;лиотшл дольной оси держатель, закрепленные на нем вакуумную камеру, соединенную с полой присоской, и узел создания разрежения в вакуумной камере, отличающийся тем, что, с целью повышения надежности работы, камера выполнена из эластичного материала, узел создания разрежения выполнен в виде упругого элемента, расположенного в полости камеры с возможностью взаимодействия с ее боковыми стенками, и силовых цилиндров со штоками, размешенных по обе стороны камеры с возможностью взаимодействия штоков с ее боковыми стенками. 2.Орган по п. 1, отличающийся тем, что камера выполнена из двух частей, связанных между собой. 3.Орган по п. 1, отличающийся тем, что упругий элемент выполнен в виде пружины.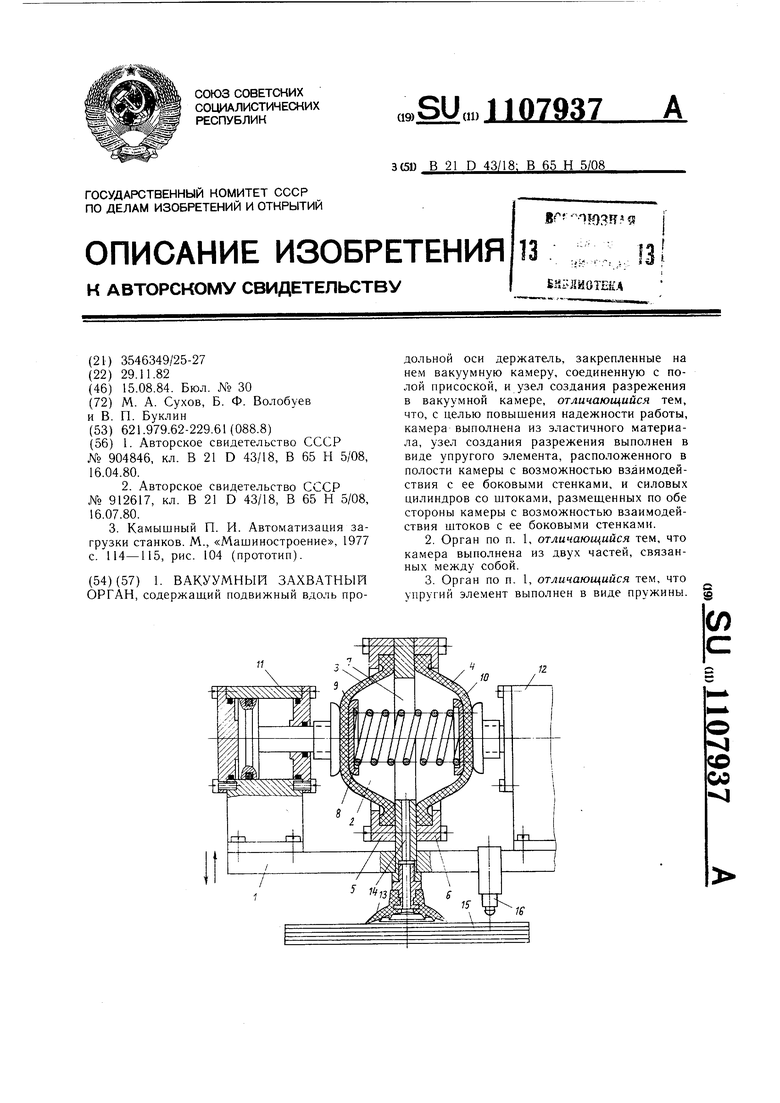
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Вакуумный захватный орган | 1980 |
|
SU904846A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Вакуумный захватный орган | 1980 |
|
SU912617A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Камышный П | |||
| И | |||
| Автоматизация загрузки станков | |||
| М., «Машиностроение, 1977 с | |||
| Способ получения борнеола из пихтового или т.п. масел | 1921 |
|
SU114A1 |
| Счетная таблица | 1919 |
|
SU104A1 |
