Изобретение касается способа определения полного реактивного сопротивления синхронных машин.
Одним из употребительных способов определения реактивного продольного и поперечного сопротивлений является следующий. Испытуемую машину соединяют с валом синхронного двигателя значительно большей мощности таким образом, чтобы роторы указанных мащин были в пространстве сдвинуты на 90° электрических, и обе мащины приключаются к одной и той же сети переменного тока. Тогда при помощи измерительных приборов в цепи испытуемой машины можно определить г и х (машина включается невозбужденной). Считается, что угол 6 большого двигателя (ведущего) равен нулю.
Подобный способ, однако, неточен и дает возможность определить только два конечных значения реактивного сопротивления: продольную составляющую реактивного сопротивления л(испытуемый двигатель вращается вхолостую) и поперечную составляющую Хд (определяется по указанному методу).
В ряде случаев весьма интересно определить всю кривую изменения реактивного сопротивления в функции угла 6 т. е. (Q).
Для осуществления этого предлагается способ, составляющий предмет настоящего авторского свидетельства и поясненный фиг. 1 и 2 чертежа.
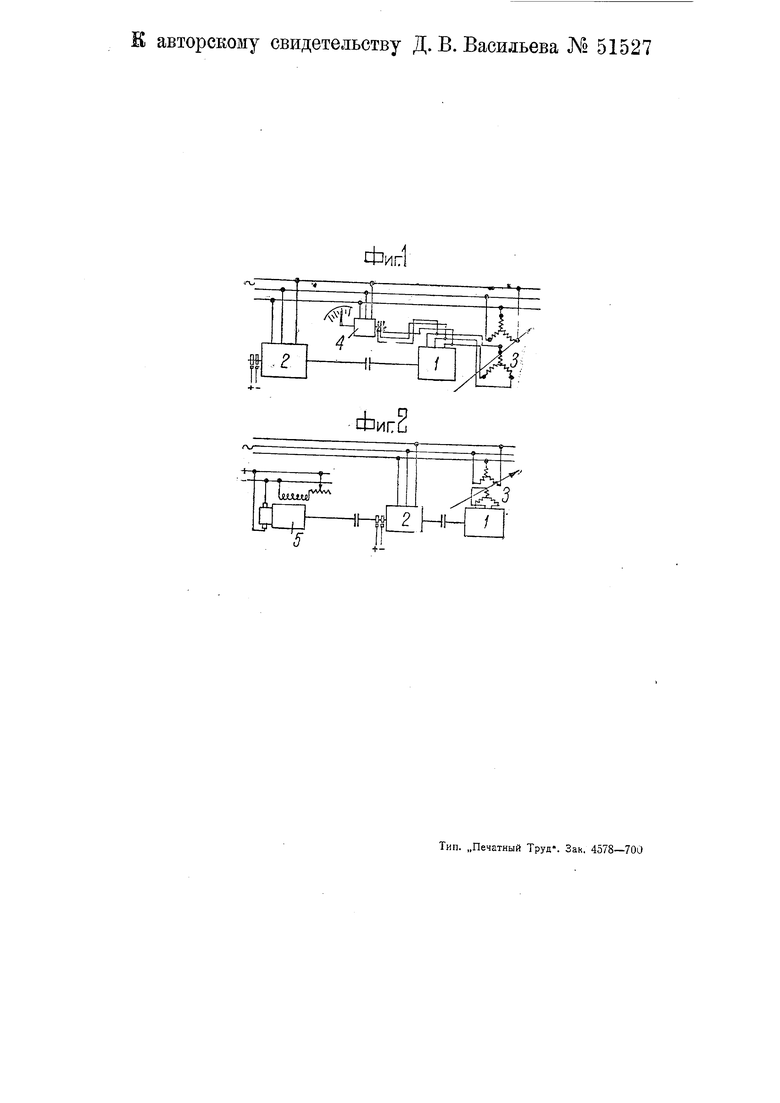
Испытуемая машина / и вспомогательный синхронный двигатель 2 (большей или равной мощности) механически соединяются между собою в любом положении (фиг. 1).
Вспомогательный двигатель присоединяется к сети непосредственно, а испытуемый-через фазорегулятор 3 (с коэфициентом трансформации, равным единице).
Если изменять фазу напряжения на зажимах испытуемого двигателя, то можно получить кривую (Q}.
Действительно, фаза обратной э. д. с. двигателя (реактивного падения напряжения) определяется пространственным положением ротора, которое почти не меняется, так как испытуемая мащина механически связана с вспомогательным возбужденным синхронным двигателем.
Следовательно, можно подобрать такое положение фазорегулятора, когда фазы ротора и приложенного напряжения будут совпадать (это определяется по минимуму тока в статоре). Тогда мы получим л. Поворачивая постепенно ротор фазорегулятора, можно получить все значения к вплоть до Kq (определится по максимуму тока в статоре).
Если вспомогательный двигатель взят большой мощности, то угол О можно определить, применяя фазометр 4 в виде двигателя двойного питания с вращением полей в одну сторону, приключенного одной обмоткой к сети, а другой-на вторичные зажимы фазорегулятора.
Если же двигатели одинаковой мощности, то нужно дополнительно определять угол смещения роторов двигателей при изменении фазы вторичного напряжения. Можно также применить дополнительный двигатель 5 постоянного тока (фиг. 2), который должен компенсировать нагрузку на вспомогательный синхронный двигатель с тем, чтобы последний работал в режиме холостого хода генератора.
Предлагаемый способ освобождает от необходимости сцепления двигателей под углом 90° и позволяет получить всю кривую л /(0), что особенно существенно при исследовании работы синхронных реактивных двигателей и однофазных индукционных систем (влияние формы полюсных наконечников и т. п.).
Предмет изобретения.
1.Способ определения полного реактивного сопротивления синхронных машин, осуществляемый при применении вспомогательного синхронного двигателя, механически сцепленного с испытуемой машиной, отличающийся тем, что, с целью получения кривой изменения реактивного сопротивления в зависимости от угла между осью полюсных наконечников и направлением вращающегося поля, испытуемую машину невозбужденной приключают в общую с вспомогательным двигателем сеть через фазорегулятор, который в начале измерений ставят на совпадение по фазе напряжения на зажимах обоих двигателей, а затем последовательно поворачивают в различные положения, соответствующие промежуточным, определяемым обычным образом, значениям реактивного сопротивления машины.
2.Прием осуществления способа по п. 1, отличающийся тем, что для определения указанного выше угла применяют фазометр, например, в виде двигателя двойного питания, который присоединяют к напряжениям сети и испытуемого двигателя.
3.Прием осуществления способа по пп. 1 и 2, отличающийся тем, что для удержания вспомогательного синхронного двигателя в режиме холостого хода применяют двигатель постоянного тока, механически сцепляемый с синхронными двигателями.
сЬигб