Синхронно-следящие системы с сельсинами имеют широкое применение в автоматике. Однако сравнительно небольшие вращающие моменты известных сельсинов вызывают усложнение следящей системы, требующей введения в нее нескольких усилителей для получения необходимой величины передаваемого момента.
Предметом изобретения является синхронно-следящий привод, состоящий из приводного двухфазного асинхронного двигателя и следящего устройства типа синхронизирующейся сельсинной пары и обеспечивающий возможность непосредственного использования мощности, подводимой к элементам следящего устройства для приведения во вращение приводного двигателя, без применения ламповых или каких-либо иных усилителей.
Возможность использования мощности сети, подведенной к обмоткам возбуждения сельсинов, для получения на принимающей оси момента, в сотни (а иногда и в тысячи) раз превышающего момент на передающей оси, достигается в соответствии с изобретением путем подключения первичных цепей сельсинной пары к источнику переменного тока, а вторичных - к обмоткам приводного двигателя.
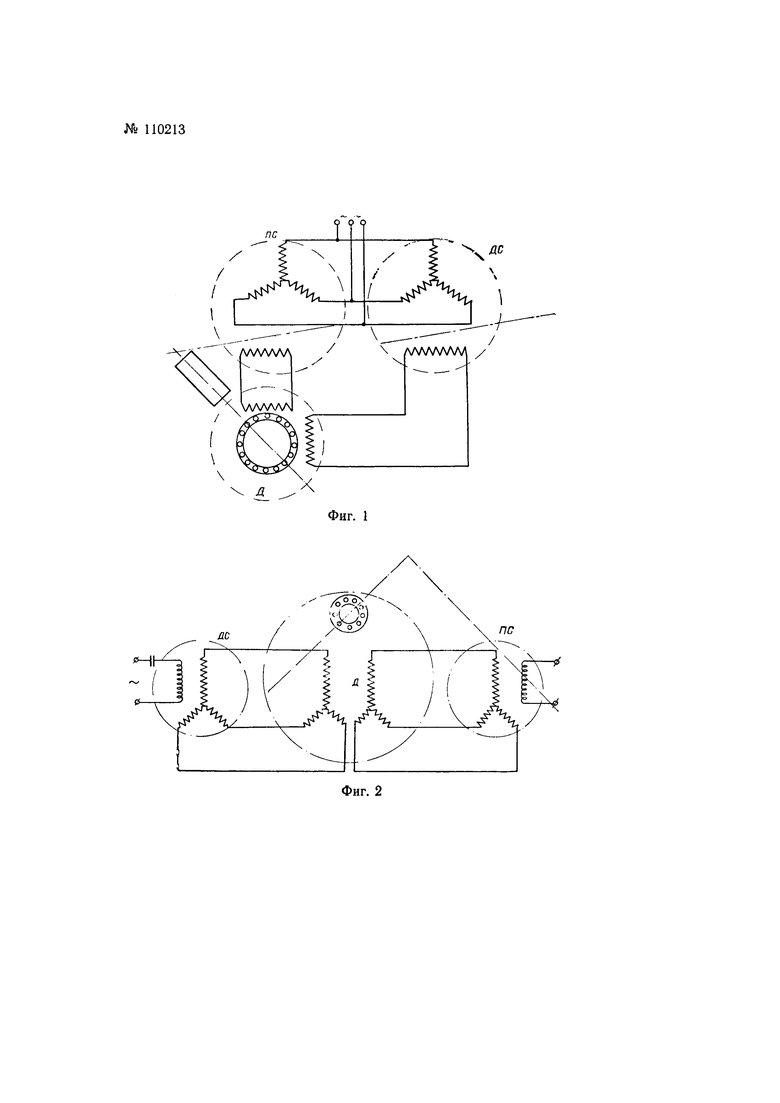
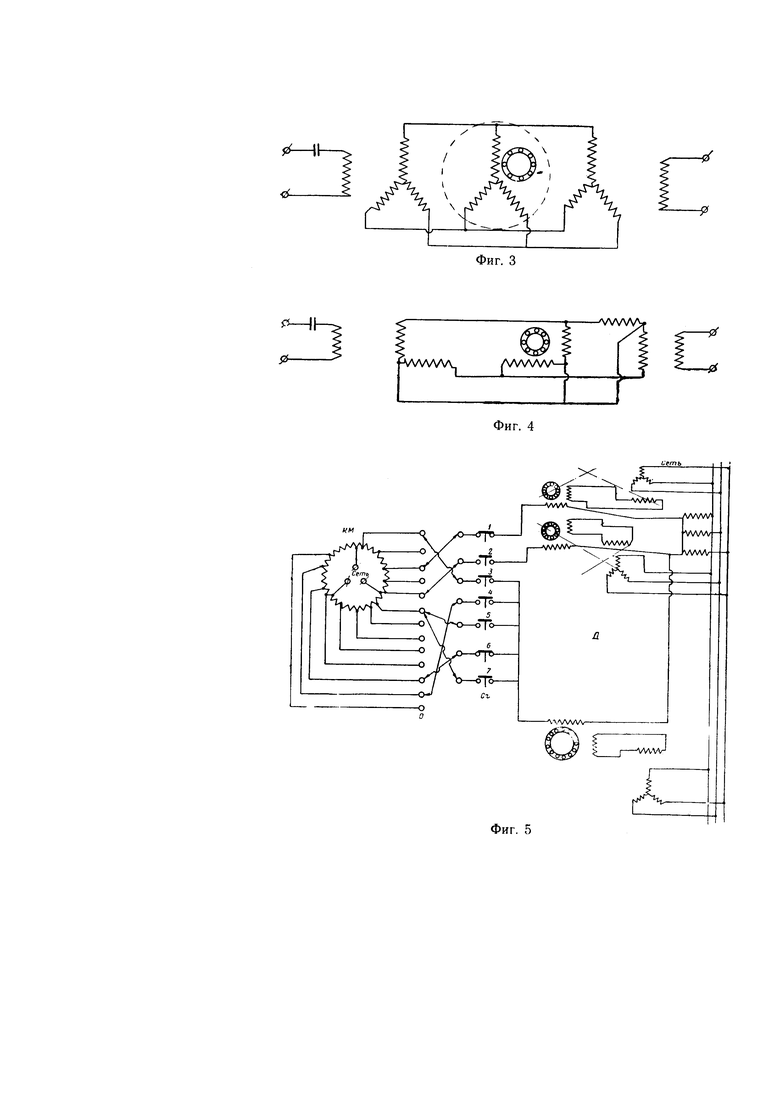
На фиг. 1-5 представлены различные варианты схем выполнения предлагаемого синхронно-следящего привода.
В схеме, показанной на фиг. 1, дающий ДС и принимающий ПС сельсины включены в трехфазную сеть со стороны своих трехфазных обмоток; их однофазные обмотки обычно при работе в схеме синхронного поворота включаются при этом навстречу одна другой. (На фиг. 1 они включены на две обмотки двухфазного асинхронного двигателя Д).
При согласованном положении роторов сельсинов токи в обмотках асинхронного двигателя совпадают по фазе и вращающий момент двигателя отсутствует.
Ротор одного из сельсинов (датчика) связан с управляющим валом или рукояткой, ротор второго - через замедляющий редуктор - с валом асинхронного двигателя Д. Если между валом двигателя и управляемым валом имеются еще сервоприводы илииные механизмы, как, например, гидромуфты и т.п. - то ротор принимающего или «контрольного» сельсина может быть связан с любым промежуточным валом.
Если ротор дающего сельсина повернут против вращения электромагнитного поля, то фаза тока в соединенной с дающим сельсином обмотке асинхронного двигателя Д опережает фазу во второй обмотке, и двигатель начинает вращаться в определенную сторону, поворачивая ротор контрольно-приемного сельсина и управляемую им ось до достижения согласования с управляющей осью. При этом, если, например, требуется осуществлять передачу с угловой скоростью порядка 20 град/сек и двигатель имеет среднюю скорость за время перемещения в 2000 об/мин. (50 гц), то момент на оси контрольного сельсина в  раз больше момента на оси асинхронного двигателя.
раз больше момента на оси асинхронного двигателя.
Таким образом, предлагаемая схема дает в данном случае непосредственно без применения усилителя усиление момента в 600 раз (практически, с учетом к.п.д. редуктора в 250-300 раз).
Усиление момента, который может дать один такой сельсино-двигательный каскад в схемах синхронного поворота, приближенно равен  . При меньших скоростях следования (применяемых, как правило, в промышленных автоматических системах управления задвижками, щитами, рабочими органами различных машин и т.п.) или при повышенной частоте сети (применяемой, например, в сельсинных схемах в авиации), можно достичь усиление момента, а значит и мощности в несколько тысяч раз.
. При меньших скоростях следования (применяемых, как правило, в промышленных автоматических системах управления задвижками, щитами, рабочими органами различных машин и т.п.) или при повышенной частоте сети (применяемой, например, в сельсинных схемах в авиации), можно достичь усиление момента, а значит и мощности в несколько тысяч раз.
Вполне возможно применение, например, в качестве контрольного, сельсинов больших габаритов, тогда коэффициент усиления момента дающей оси может быть еще в несколько раз увеличен.
На первой выходной оси описываемой следящей системы ставится мощный сельсин, часть мощности вторичной обмотки которого подводится ко второй обмотке асинхронного двигателя первого каскада, а основная часть мощности - к первой обмотке более мощного асинхронного двигателя (или нескольких асинхронных двигателей, если требуется синхронное и синфазное вращение целого ряда валов, а мощности дающей оси для этого недостаточно), с выходной осью которого связаны роторы контрольных сельсинов той же мощности или, если предполагается дальнейшее усиление, то большей мощности.
Применяя бесконтактные сельсины и асинхронные двигатели с коротко замкнутым ротором, можно получить совершенно бесконтактную систему силового синхронного поворота и вращения. Используя в качестве сельсинов в последующих каскадах мощные асинхронные двигатели, соединенные по схеме фазорегулятора, можно этой системой решить задачу управления осью с любым моментом при ничтожном моменте на дающей оси.
Точность следования в рассматриваемой (фиг. 1) и последующих схемах определяется точностью изготовления самих сельсинов, т.е. точностью следования фазы тока за осью ротора, и не ухудшает условий точности работы в сравнении с обычной схемой синхронного поворота. Действительно, как известно, искажения характеристики следования фазы за осью ротора могут иметь место при переменной нагрузке.
На фиг. 2-4 изображены варианты схемы фиг. 1, при которых поток возбуждения создается однофазными обмотками как и в наиболее распространенной схеме синхронного поворота. Однако фаза возбуждения датчика сдвинута на П/2 от фазы возбуждения приемника. Трехфазные обмотки поданы на две различные (фиг. 2) или одну и ту же (фиг. 3) обмотку асинхронного двигателя.
При совпадении положения осей роторов сельсинов ось потока, создаваемого в обмотке токами, наведенными обмоткой возбуждения датчика, совпадает с осью потока, создаваемого токами, наведенными обмоткой возбуждения приемника. Момент на оси двигателя при этом равен нулю, несмотря на сдвиг временной фазы между этими токами. При повороте ротора датчика ось первого потока сдвигается в пространстве от оси второго потока и на валу двигателя появляется вращающий момент, пропорциональный сдвигу осей роторов сельсинов. Характеристики моментов, коэффициенты усиления момента и другие особенности, отмеченные на фиг. 1, целиком относятся и к этим схемам. Однако здесь отсутствует на оси сельсинов вращающий момент, вызываемый наличием трехфазного возбуждения в схеме по фиг. 1.
Вполне возможна также работа по двухфазной схеме, показанной на фиг. 4, где изображено наиболее наглядно положение роторов сельсинов со сдвигом в 90°, соответствующее полному моменту на оси асинхронного двигателя.
В качестве дающего и контрольного элементов, естественно, могут быть применены не только сельсины, но и другие аппараты синхронной связи, дающие на выходе пространственный или временный поворот системы токов.
Имеется возможность использовать в схеме различные по принципу аппараты синхронной связи, применяя, например, в качестве дающего аппарата сельсин, а в качестве контрольного - «круговой мост» (по авт. св. №48689) или фазорегулятор с поворотом вектора тока нулевой последовательности и т.п. Особый интерес при этом представляет применение в качестве дающего аппарата «кругового моста» КМ (фиг. 5) с отпайками О, к которым «счетная схема» Сч последовательно приключает обмотки ряда асинхронных двигателей Д различных механизмов, которые необходимо последовательно устанавливать на наперед заданные углы по определенной, набираемой оператором, программе. Вторые обмотки этих двигателей связаны с обмотками контрольных сельсинов, роторы которых соединены с соответствующими механизмами. Таким путем может решаться важный узел задачи управления химическим агрегатом, шлюзом и т.п.
Синхрокно-следящий привод, состоящий из приводного двухфазного асинхронного двигателя и следящего устройства типа синхронизирующейся сельсинной пары, работающей в трансформаторном режиме (или ей подобного), с механическим соединением роторов приводного двигателя и принимающего сельсина, отличающийся тем, что, с целью непосредственного использования мощности, подводимой к элементам следящего устройства, для приведения во вращение приводного двигателя, первичные цепи сельсинной пары подключены к источнику переменного тока, а вторичные - к обмоткам приводного двигателя.
