значение регулируемой координаты, а фо - ее значение в исходном состоянии Г-Ч .. и.. . Однако эги спед5паие приводы развивают в об-ьекге регулирования максимально возможные значения скорости и ускорения, чго ведет к ускорению износа исполнительных эпеменгов следшдего привода и объекта регулирования, сокраще- аию сроков их службы н снижению надежности. Наиболее близким по технической сущности к изобретению является устройство для формирования; управляющего . воздействия следящего привода, содержащее счетно-решающий блок, блок формирования сигнала управления и датчик входного воздействия L3J , Целью изобретения является повышение надежности устройства, Постигается, это тем, что блок формирования сигнала управления содержит переключатели, замыкаюшие и размыкающие контакты, исполнительный механизм, потенциометр, компаратор, реле времени, формирователь знака скорости, формирователь знака ускорения, блок совпадения, реле запуска, индикатор 8 реле реверса, вход которого соединен с движком потенциометра, а выход - с входами формирователя знака ускорения и первого перек™ лючателя, первый выход которого соединен с первым входом формирователя знака скорое ГИ; а второй выход с входом индикатора, первый выход которого соединен с вторым входом формирователя знака скорости, а второй выход через реле запуска ™ с входом реле времени, первый выход счетно-решающего блока через первые замыкаюшие контакты соединен с первым входом второго переключателя, второй выход J- с вторым входом второго переключател, третий выход через вторые замыкающие контакты - с первым входом третьего переключателе, четвертый выход с вторым входом греть Го переключателя, пятый выход непосредственно с первыми входами блика совпадения, компаратора и четвертого пере ключателя, а через первые размыкающие контакты - с выходом четвертого переключателя н входом датчика входного воз действия, два выхода второго переключагеля соединены с соответствуюшимн вхо нами нсполнительно1 о механизма, выход которого соединен с движком потенциоме ра, первый выход третьего переключател соединен с крайними выводами потенцйометра, а второй выход через вторые замыкающие контакты - с вторым входом блока совпадения и непосредственно с средним выводом потенциометра, движок которого через соответствующие аамьг -:а- юшие контакты соединен с вторыми входами четвертого переключателя и компаратора. На фиг. 1 дана йпок-схема предлагаемого устройства; на фиг, 2 и 3 - временные диаграммы работы устройства. Устройство для управления следящим приводом содержит датчик 1 входного воздействия, счетно-решающий блок 2, блок 3 формирования сигнала управления, потенциометр 4, исполнительный механизм 5, компаратор 6, первый, второй, третий и четвертый переключатели 7,8, 9,10, формирователь 11 знака скорости, формирователь 12 знака ускорения, реле реверса 13, реле времени 14, блок совпадения 15, первые, вторые, третьи и четвертые замыкающие контакты 16,17, 18 и 19, реле запуска 20, индикатор 21, первые н вторые размыкающие 1кон-« такты 22 к 23. На временных диаграммах: f ц - требуемый угол наведения объекта регулирования; Т - требуемое время наведения ф - требуемая скорость движения в заданной точке в конце режима наведения; ф И ф,(- минимально-необходимые значения максимальных скорости и ускорения движения объекта регулирования; Фи текущее значение напряжения, пропорционального текущей скорости движения; - напряжения, пропорциональные значениям ф SPт U(i)..- напряжение, пропорциональное tf к ; U(t) - текущее значение напряжения на выходе протенциометра; Cp(t) - текущее значение угла наведения;пкт. напряжение питания; Zi j - состояние { -го переключающего элемента (1 соответствует включенному состоянию, О - выключенному). Счетно-решающий бпок 2 предназначен для определения по поступающим в него сигналам о угле наведения j/j , времени наБедения Т и око- росги в заданной точке (в конце режимй наведения)ф| величин, манимально не обходнмых максимельной скоросга двн жепия объекта регулирования, модуля максимального ускорения движения и формирования на своих соогвегсгвующих выходах {апряжоний, пропорциональных этим величинам. Потенциометр 4 служит для формирования с помощью исполнительного механизма 5 закона изменения скорости ахолного воздействия. Его средний выво и соединенные между собой крайние неподвижные выводы соединены с двумя подвижными контактами третьего переключателя 9, неподвижные контакты этих групп соединены перекрестно между собой и через замыкающие контакты 17 реле запуска 2О соединены с выходом счетно-решающего блока 2, на котором формируется напря/ъйНиеЦф j , пропорциональное требуемой максимальной скорости движения объекта регулирования. Управление переключателем 9 осуществляется формирователем знака скорости 11. Движок потенциометра 4, кинематически соединенный с выходом исполнител ного механизма 5, соединен электрически с вход реле реверса 13 через-замыкаюшие контакты 19 блока совпадения 15, с вторым входом компаратора 6 и через замыкающие контакты 18 реле запуска 20 с вторым входом переключателя Ю, управление которым осуществляется компаратором 6. Реле времени 14 служит для исключения возможности ложного срабатывания электромагнитных реле блока совпадений 15 в ачальный период работы устройст ва. Размыкающие контакты 22 реле вре мени соединяют средний неподвижный вы вод потенциометра 4 с вторым входом блока совпадений 15. Блок совпадений 15 служит для определения соотношения знаков требуемой максимальной скорости и требуемой скорости в заданной точке. Блок совпадения 15 осуществляет управление переключаге ,лем 7., Реле реверса 13 служит для фиксации моментов нахождения движка потенциометра 4 в крайних положениях. Его выход соединен с подвижным контактом переключателя 7 и входом формирователя 12 знака ускорения, служащего для изменения направления вращения исполнительного механизма 5 в моменты достижения движком потенциометра 4 одного из крайних положений. Это изменение осуществляется двумя группами переклк чающих контактов переключателя 8, управление которым осуществляется формирователем 12 знака ускорения. Подвижные контакты переключателя 8 соединены с входами :исполнительного механизма 5, а неподвижные соединены перекрестно межпу собой и через замыкающие контакты 16 реле запуска. 2О - с выходам блока 2, на котором формируется напряжение IT ф , пропорциональное модулю требуемого максимального ускорения движения следящего привдда. Формирователь 11 знака скорости предназначен для изменения полярности подводимого от счетно-решающего блока 2 к :потен- циометру 4 напряжения при несовпадении знаков скорости в требуемой точке наведения и максимальной скорости движения в требуемый диаграммой наведения момент. Компаратор 6 служит для индикации момента равенства текущей скорости движения объекта регулирования и требуемой скорости в заданной точке. Индикатор 21 служит для индикации окончания работы устройства. Работа устройства для формирования управляющего воздействия следящего привода иллюстрируется временными диаграммами на фиг, 2 и 3 и происходит следующим образом, Счетно-рещающий блок 2 по полученным сигналам о требуемом угле наведения fi -t времени Т и требуемой скорости движения объекта регулирования в .требуемой точке f ц определяет в форме напряжений величину и знак требуемой максимальной скорости движения и величину модуля максимального ускорениядвижения. Эти напряжения появляются на его соответствующих выходах. Команда на включение устройства подается подключением напряжения питания реле запуска 20 (момент времени О на фиг, 2 и 3), при этом происходит срабатывание реле запуска 2О, которое производит следующие операции: замыкая контакты 17, подводит напряжение, пропорциональное требуемой максим 1льной скорости движения, к среднему неподвижному и крайним выводам потенциометра 4; замыкая контакты 18 и размыкая контакты 23, отключает вход датчика входного воздействия и вход следящего привода от источника сигнала, пропорционального требуемой конечной скорости движения, и Подключает эти входы к двуокку потенциометра 4;
замыкая контакты 16, подключает напряжение, пропорциональное требуемому максимальному ускорению, к входу исполнительного механизма 5, начинйя YeM самымперемещение движка потенциометра 4, кинематически/связанного с валом исполнительного механизма;
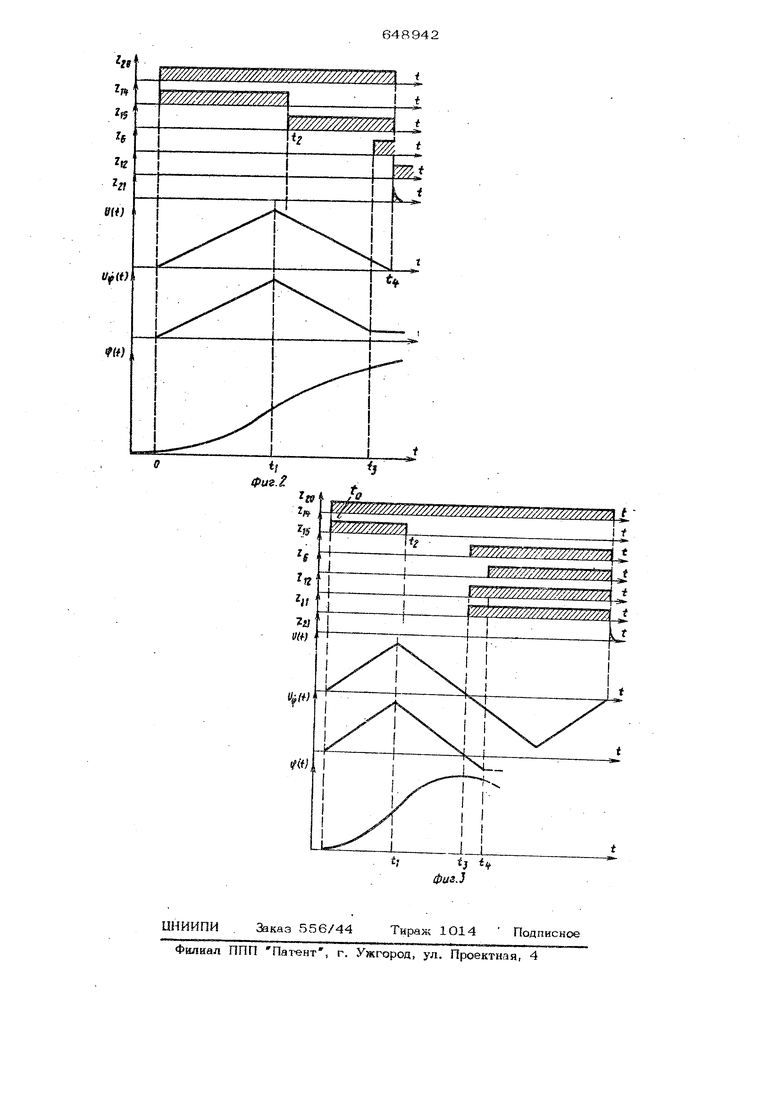
включает реле времени 14, которое отключает своими контактами 22 первый вход блока совпадений 15 от неподвижно- 10 и го среднего .вывода потенциометра 4 на время, определяемое временем срабатывания реле времени 14. С вижок потенциометра 4, находившийся в момент времени О (см. фиг, 2 и 3) в крайнем положении, при движении до неподвижногО среднего вывода линейно увеличиваетНапряжение на своем выходе до велнчнньг1Г (момент времени tj ), а затем гак же линейно уменьшает его, 0 продолжая перемещаться в том же направлении. При этом скорость его перемещения определяется скоростью вращения вала двигателя исполнительного механизма 5, г.е. требуемым максимальным ускорением движения объекта регулирования. В момент времени t2 и после оконча- ния времени включенного состояния реле времени 14 контакты 22 замыкаются и подключают первый вход блока совпадения 15 к среднему неподвижному выводу потенциометра 4. При этом напряжение, имеющееся на этом выводе, оказывается подключенным к первому входу блока .совпадений 15, ко второму входу которо го уже подведено напряжение, пропорци- онЕшьное требуемой конечной скорости движения. В дальнейщем работа устройства зависит от соотношения знаков этих напряжений. Если онн совпадают, т.е. если совпадают знаки максимальной и требуемой конечной скорости движения (см. фиг. 2) то в момент времени tg блок совпадения 15 обеспечивает изменение положения замыкающих контактов 19 и контактов переключателя 7, В результате этого компаратор- 6 подключается своим первым входом к движку потенциометра 4, а выход реле реверса 13 соединяется с входом индикатора 21 окончания-работы устройства и отключается от входа формирователя знака скорости 11. В момент времени tg когда напряжение на движке потенциометра 4 становится равным напряжению, пропорциональ
ному требуемой конечной скорости, компаратор 6 контактами переключателя1О отключает вход датчика 1 входного воэдействия и вход следящего привода or движка потенциометра 4 и подключает их к источнику сигнала, пропорционального требуемой конечной скорости движения. Таким образом, следящий привод заканчивает отработку режима наведения далее устройство подготавливает себя к выполнению следующего цикла наведения. Ввиду того, что исполнительный механизм 5 продолжает вращаться и переме- шать движок потенциометра 4, то в момент i: напряжение на нем станет равным нулю. В результате этого реле ре-верса 13 включает сигнал на срабагыванне формирователя 12 знака ускорения. индикатора 21 окончания работы уст- ройства. Формирователь 12 знака ускорения изменяет полярность напряжения управления исполнительным механизмок 5с помощью переключателя 8, а индккатор 21 размыкает свои контакты в цепи питания обмотки реле запуска 2О. В результате контакты 16,17,18 а 23 реле запуска 2О возвращаются в исходное состояние, отключив тем самым исполнительный механизм 5 и потенциометр 4 от счетно-рещающего-блока 2, вход датчика 1 входного воздействия от движка потенциометра 4 и защунтировав контакты переключателя 10, соединяющие источник сигнала (на входе которого до момента срабатывания компаратора было напряжение, пропорциональное требуемой конечной скорости движения объекта регулирования) с входом следящего привода. Благодаря этому даже при выключении питания устройство управления на вход датчика 1 входного воздействия и следящего привода поступает корректкрукяций сигнал. В случае, когда знаки напряжений, пропорциональных расчетной максимальной и требуемой конечной скорости движения различны, в момент 12. (см, фиг.З) блок совпадения 15 не срабатывает, в результате чего замыка:квщие контакты 19 и контакты переключателя 7: остаются в исходном состоянии. В момент времени 1;, когда двячсок потенциометра 4 окажется в крайнем аодгоженин и напряженве на его выходе станет рас ным нулю, реле реверса 13 переводит формирователи 11 и 12 в новое положение, в результате чего они изменят положевве
конгакгов переключателей 8,9, При этом нэ-хза перёлйючения конгактюв переключагеля 8 измеЕшегся направление вращения исполнительного механизма 5, а яэ-за переключения контактов переключателя 9 изменяется знак напряжения, подведенного к погенциомегру 4. В результата сохраняется линейность изменения напряжения, пропорционального требуемой текущей скорости движения следящего привода.
Одновременно с этим срабатывает блок совпадения 15, так как теперь знаки напряженки на его входах одинаковы. В результате его замыкающие контакты 19 и контакты переключателя 7 изменяют свое положение, обеспечивая тем самым возможность отключения в момент времени Ъп входа датчика 1 входного воздействия и входа следящего привода от движка потенциометра 4 в момент равенства напряжений на вхоцах компаратора 6 с помощью контактов переключателя 10 и подключение этих входов к источнику напряжения 1ГФЦ , а также отключение формирователя 11 от выхода реле реверса 13 и подключение к нему индикатора 21 окончания работы устройства.
В момент времени t , когда напряжение на движке потенциометра 4 станет равным кулю, реле реверса 13 вклк чает сигнал на срабатывание формирователя 12,. в результате чего вновь изменяют свое положение контакты переключателя 8, срабатывание индикатора 21, происходящее одновременно с срабатыванием формирователя 12 приводит к выключению реле запуска 2О, которое возвращает свои контакты 16,17,18 и 23 в исходное состояние. Таким образом, устройство подготовлено к следующему срабатыванию.
Применение такого устройства позволяет снизить динамические нагрузки на объект регулирования и исполнительные элементы следящего привода до требуемых в каждом конкретном случае величин, за счет чего снижается их износ и повышается надежность следящего привода и самого объекта регулирования.
Формула изобретения
Устройство для управления следящим приводом, содержащее счетно-решающий блок, блок формирования сигнала управления и датчик входного воздействия.
отличающееся тем, что, с целью повьпиения надежности, блок формирования сигнала управления содержит переключатели, замыкающие и размыкающие контакты, исполнительный механизм, потенциометр, компаратор, реле времени, формирователь знака скорости, формирователь знака ускорения, блок совпадения, реле запуска, индикатор и репе реверса, вход которого соединен с подвижным контактом потенциометра, а выход - с входами формирователя знака ускорения и первого переключателя, первый выход которого соединен с первым входом формирователя знака скорости, а второй выход - с входом индикатора, первый выход которого соединен с вторым входом , формирователя-знака скорости, а второй выход через реле запуска - с входом реле времени, первый выход счетно-решающето блока через первые с амыкающие контакты соединен с первым BXOfl w второго переключателя, второй выход - с вторым входом второго пфеключателя, третий выход через вторые замыкающие контакты с первым входом фетьего переключателя, четвертый выход - с вторым входом третьего переключателя, пятый выход непосредственно - с первыми входами блока совпадения, компаратора и четвертого гереключателя, а через первые размыкающие контакты - с выходом четвертого переключателя и входом датчика входного воздействия два. выхода второго переключателя соединены с соответствующими входами исполнительного механизма, выход которого соединен с движком потенциометра, первый выход третьего переключения соединен с крайними выводами потенциометра, а второй выход через вторые размыкающие контакты - с вторым входом блока совпадения и непосредственно со средним выводом потенциометра, движок которого через соответствующие замыкающие контакты соединен с вторыми входами четвертого переключателя и компаратора.
Источники информации, принятые во внимание при экспертизе
1,Лернер А. Я, и др. Оптимальное управление, М. Энергия, 197О, с, 3744,
2,Энциклопедия кибернетики. Киев, 1973, том 2, с, 431.
3,Воронов А. Ai Осковы теории автоматического управления, М.-Л. Энергия, 1965, часть 1уС. 15-19.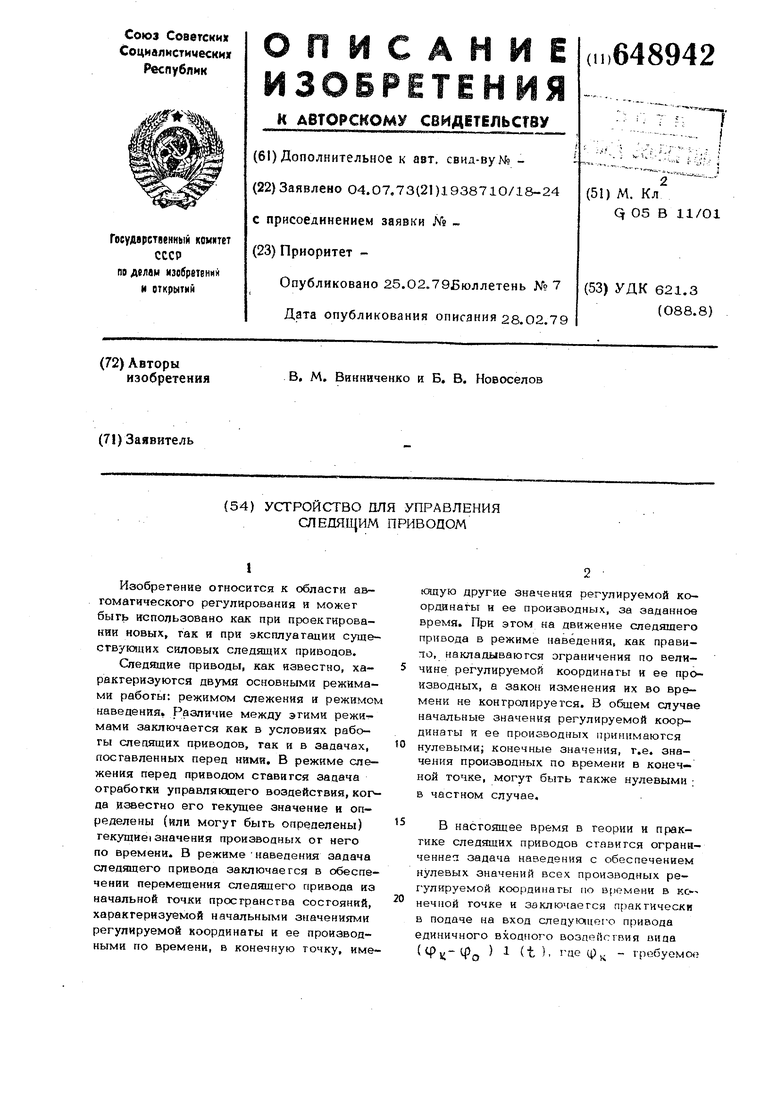
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для формирования управляющего воздействия следящего привода | 1973 |
|
SU516016A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ НАСТРОЙКИ | 1972 |
|
SU334548A1 |
| Устройство для многопозиционного регулирования | 1973 |
|
SU467336A1 |
| Блок нелинейности | 1978 |
|
SU752379A1 |
| Система управления станом с порезкой проката на ходу | 1976 |
|
SU654934A1 |
| СИГНАЛИЗАТОР НАЧАЛА ОБЛЕДЕНЕНИЯ ПРОВОДОВ ВОЗДУШНЫХ ЛИНИЙ ЭЛЕКТРОПЕРЕДАЧИ | 1995 |
|
RU2080723C1 |
| Следящий привод | 2019 |
|
RU2723331C1 |
| Стенд для испытания шахтных подъемников | 1982 |
|
SU1062549A1 |
| САМОНАСТРАИВАЮЩАЯСЯ СЛЕДЯЩАЯ СИСТЕМА8Л ТВ | 1971 |
|
SU436329A1 |
| Устройство для испытаний механических элементов антенн | 1975 |
|
SU620939A1 |