(54) УСТАНСеКА ДЛЯ МОДЕЛИРОВАНИЯ КАЧКИ И ВИБРАЦИИ СУДОВ
| название | год | авторы | номер документа |
|---|---|---|---|
| Стенд для моделирования бортовой и килевой качки судна | 1989 |
|
SU1646946A2 |
| Стенд для испытания пневматических шин и упругих элементов подвесок транспортных средств | 2021 |
|
RU2765320C1 |
| Стенд для испытания пневматических шин и упругих элементов подвесок транспортных средств | 2021 |
|
RU2765583C1 |
| КАТКОВЫЙ СТЕНД | 2011 |
|
RU2484444C1 |
| Стенд для моделирования бортовой и килевой качки судна | 1983 |
|
SU1150149A1 |
| Стенд для испытания пневматических шин и упругих элементов подвесок транспортных средств | 2021 |
|
RU2765397C1 |
| Стенд для испытания пневматических шин и упругих элементов подвесок транспортных средств | 2021 |
|
RU2765319C1 |
| Устройство для амортизирующего крепления надстройки к корпусу судна | 1986 |
|
SU1311998A1 |
| Успокоитель бортовой качки судна | 1979 |
|
SU880873A1 |
| Стенд для испытания пневматических шин и упругих элементов подвесок транспортных средств | 2021 |
|
RU2765582C1 |
Изобретение относится к исследованию состояния грузов при перевозке на водном транспорте.
ИзвестЩ1 установки для моделирования качки и вибрации судов, содержащие качаю- 5 щееся основание, шарнирно скрепленное с фундаментом, а также два дистанционно управляемых регуляторами электронасоса регулируемой производительности, один из которых связан гидравлически через трубопро-jo вод с исполнительными гидроцилиндрами крена, другой - с исполнительными гидроцилиндрами дифферента.
Однако известнЦе установки ре иммитируЦб ют реальные условия, в которых находятся грузы на судах во время плавания. Грузы в процессе перевозок, в особенности морск их, подвергаются одновременному воздействию сложных колебательных движений-качке 20 и вибрации различных направлений и параметров. Известные установки не обеспечивают возможности проведения исследования в широких диапазонах раздельного и совместного влияния бортовой и килевой качек, а также 25
вибрации на состояние испытуемых предметов, например навалочного груза.
Цель изобретения - обеспечение возможности исследования в широких диапазонах раздельного или совместного влияния бортовой и килевой качки, а также вибрации на состояние испытуемых предметов, например навалочного груза.
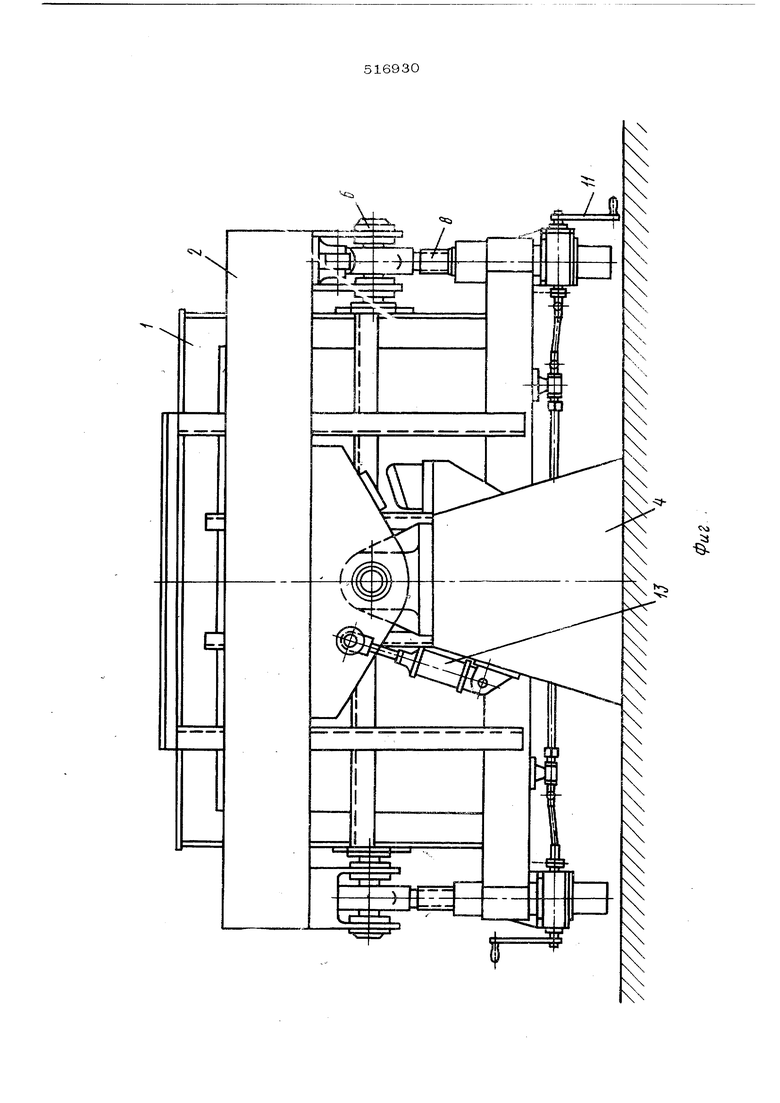
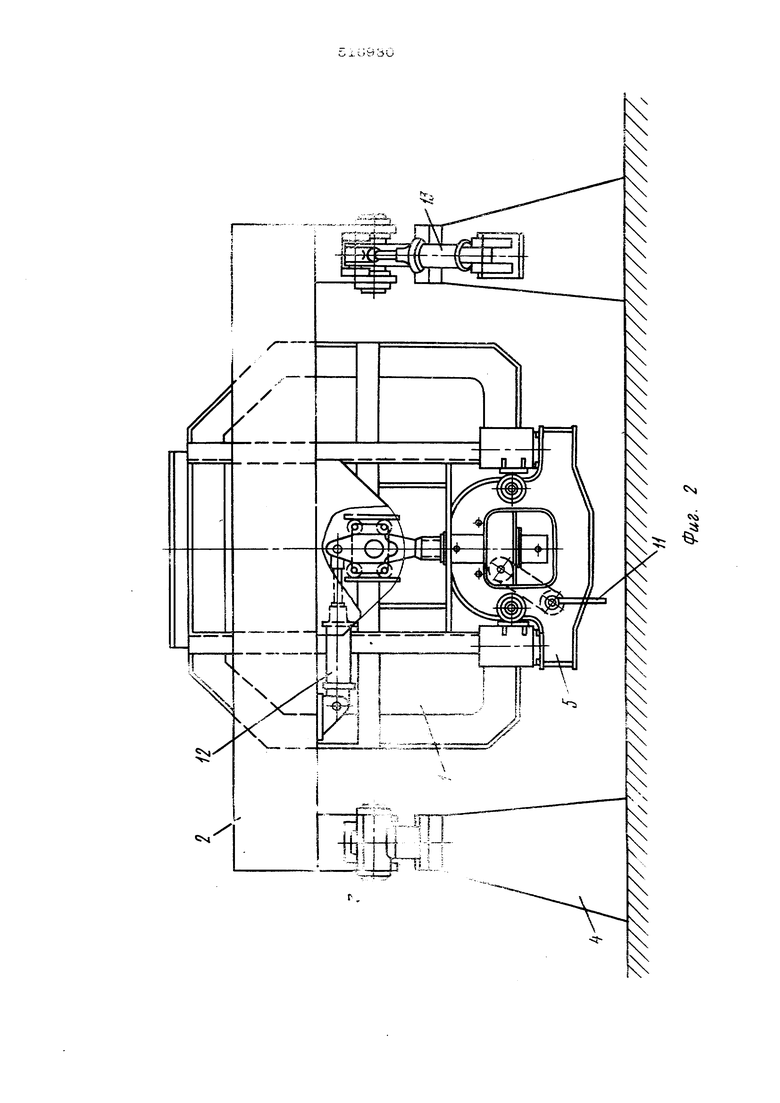
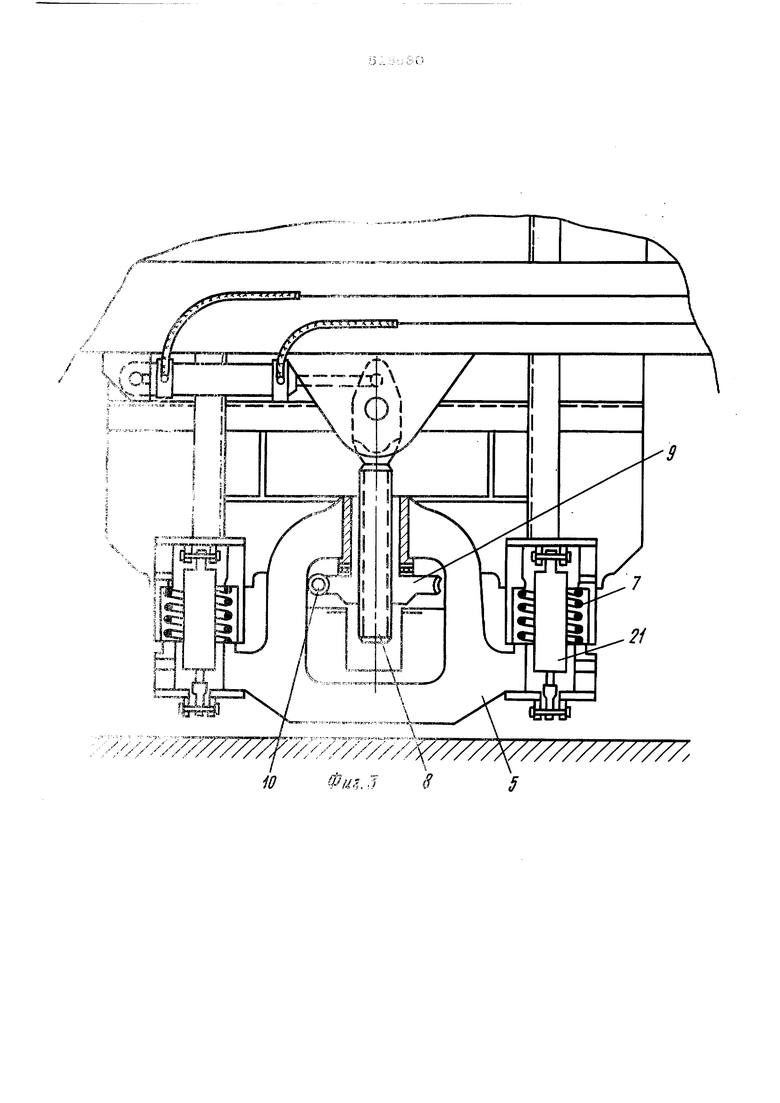
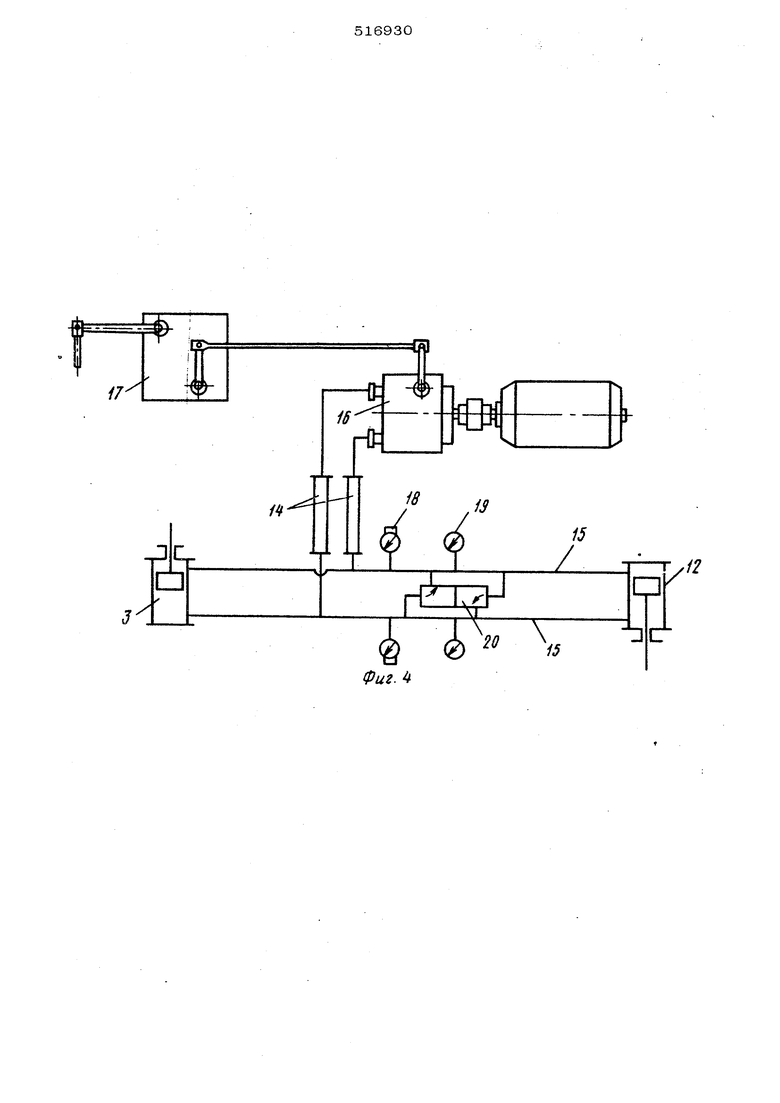
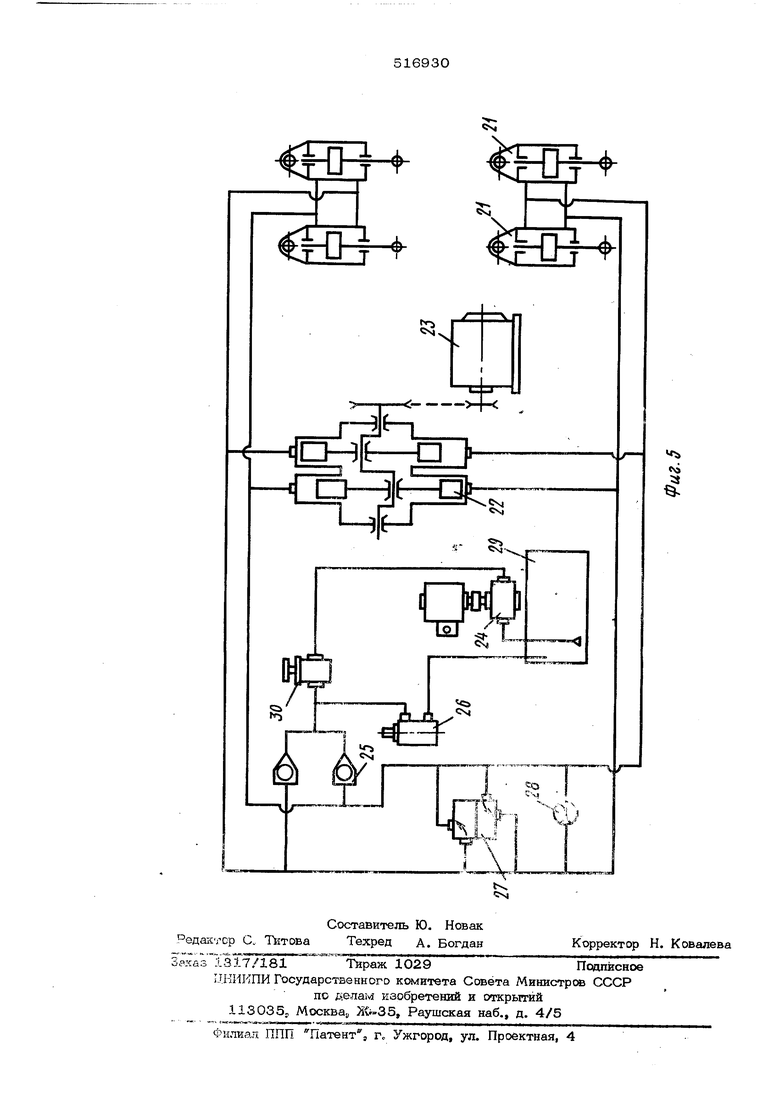
Поставленная цель достигается тем, что качаюшееся основание выполнено в виде бункера с подвеской в .виде шарнира Гука, которая содержит раму, установленную на полуосях, лежаших в жестких, связанных с фундаментом, неподвижных опорах, и подвешен ные к раме на полуосях два балансира. На траверсы балансиров через витые буферные пружины опирается бункер, при этом внутри всех буферных пружин соосно установлены виброцилиндры, каждый из которых связан гидравлически с гидропульсатором, последний соединен кинематически с регулируемым электродвигателем постоянного тока и гидраэлически - со вспомогательным электронасосом. Для обеспечения возможности изменения по высоте положения центра гяжесги загруженного бункера при смене испытуемого груза бункер целесообразно снабдить приводом вертикального перемещения и кинематически связанной с ним опорной агулкой с червячным колесом, а балансир бункера снабдить винтом, взаимодействующим с опорной втулкой. На фиг. 1 и 2 изображены поперечный и продольный виды установки; на фиг. 3 - ба- лансирное устройство установки; на фиг. 4 принципиальная схема гидропривода килевой и бортовой качки; на фиг. 5 - принципиаль ная схема гидропривода вибратора. Установка для моделирования качки и виб рации судов представляет собой испытательный стенд, в котором в качестве основания использован бункер 1 с подвеской в виде щарнира Гука. Подвеска содержит раму 2, установленную на полуосях 3, лежащих в жестких неподвижных опорах 4, установленных на фундаменте, и два балансира 5, шарнирно подвещенных к раме на полуосях 6. На траверсы балансиров 5 через витые буферные пружины 7 опирается бункер 1. Для регулирования положения бункера по высоте при изменении центра тяжести (при смене груза) каждый балансир содержит подъемный винт 8 с серьгой и опорную втулку 9, выполненную с червячным колесом. Втулка установлена подвижно на винте и связана кинематически через червячный вал 10 с ручным (или электрическим) при водом 11 вертикального перемещения бунке ра. Для сообщения бункеру продольных и поперечных колебаний, имитирующих бортовую и килевую качку, служат исполнительные гидроцилиндры 12 и 13, крена и дифферент которые через холодильники 14 посредс1вом трубопровода 15 гидравлически связаны с электронасосом 16 регулируемой производи тельности, кинематически соединенным с ди танционно управляемым регулятором 17. После НИИ обеспечивает изменение (регулирование угловой амплитуды и периода качки, а также .. заданный характер копебатепьных движений. Система гидропривода качки содержит также манометры 18, эпектроконтактные манометры 19 и предохранительные клапаны 20, обеспечивающие аварийную сигнализацию или выключение электродвигателя насоса 16 при превышении в гидросистеме предельного расчетного давления., Сообщение бункеру вибрации осуществляет ся с помощью виброцилиндров 21, установленных соосно внутри буферных пружин 7. Каждый виброцилиндр связан гидравлически с 1идропульсатором 22, соединенным кинематически с электродвигателем постоянного тока 23, и гидравлически - со вспомогате.тьным насосом 24, предназначенным для попойнения утечек масла в системе. Гидропривод вибрации содержит также невозвратные клапаны 25, предохранительные клапаны низкого и высокого давления 26 и 27, регулируемый дроссель 28, бак пополнения утечек масла 29 и фильтр ЗО. Предварительно производятся специальные грузовые расчеты с учетом удельного веса испытуемого груза, при этом определяется центр тяжести колебательной системы и с помощью привода вертика.п ного перемещения бункера совмещается с пересечением осей продольных и поперечных колебаний. При моделировании бортовой и килевой качки включаются автономные электронасосы 16 регулируемой производительности, которые через холодильники 14 попеременно подают рабочую жидкость в соответствующие полости исполнительных гидроциливдров 12 и 13 и создают потребное давление в замкнутой гидросистеме. Насосы работают автоматически, в соответствии с заданными параметрами колебаний. Параметры колебаний регулируются по величине угловой амплитуды и периода коле-баний с помощью регулятора 17, кинематически связанного с насосом 161 При моделировании вибрации предварительно устанавливают требуемую частоту. Для создания вибрации включается гидропульсатор 2 2, который подает масло к исполнигельным виброцилиндрам 21, и вспомогательный насос 24, пополняющий утечки масла в системе. Регулирование частоты вибрации производится путем изменения числа оборотов приводного электродвигателя постоянного тока Установка обеспечивает возможность проведения исследования влияний бортовой и килевей качки и вибрации при совместном и раздельном их воздействии на различные испытуемые грузы или детали судовых уст ройств, т.е. максимально приблизить испытаВИЯ к реальным морским условиям. Конструкция установки позволяет также автоматизировать процесс исследования по заданной программе. Установка в сравнении с аналогичными устройствами обладает прочностью и экономичностью, т.е. перпендикулярные друг другу оси продольных и поперечных колебаний проходят вблизи центра тяжести колебательной системы, что обус лавливает меньщие. нагрузки и затрату энергии при раскачке тяжелых испытуемых масс. -5 Фррмула изобретения 1, Установка для моделирования качки и вибрации судов, содержащая качающееся основание, шарнирно скрепленное с фундамен том, а также два дистанционно управляемых регуляторами электронасоса регулируемой производительности, один из которых связан гэдравлически посредством трубопровода с исполнительными гидроцилиндрами крена, другой - с исполнительными гидроцилиндрами дифферента, отличающаяся тем, что, с целью исследования в широких диапазонах раздельного или совместного влияния судовой бортовой и килевой качки, а также вибрации на состояние испытуемьтх предметов, например навалочного груза основание вьшолнено в виде бункера с подвеской в виде шарнира Гука, которая содержит раму, установленную на полуосяХв лежа530 щих вжесгких, связанных с фундаментом, неподвижных опорах, и подвешенные к раме на полуосях два балансира, на траверсы которых через витые буферные пружины опирается бункер, причем внутри всех буферных пружин соосно установлены виброцилиндры, каждый из которых связан гидравлически с гидропульсатором, соединенным кинематически с регулируемым электродвигателем постоянного тока и гидравлически со вспомогательным электронасосом. 2, Установка по п. 1, о т л и ч а ющ а я с я тем, что с целью обеспечения возможности изменения по высоте положения центра тяжести загруженного бункера при смене груза, бункер снабжен приводом вертикального перемещения и кинектатически связаннной с ним опорной втулкой с червячным колесом, абалансир бункера снабжен винтом, Езаимодейств,ующкм с опорной втулкой.
X -
Ф/4. J
It
18
13
Ф i
20
15
Фиг. 4
1 П -L j
т±Гт
-
ъ
«ха
