Фиг.1
Изобретение относится к судостроению, а именно к проектированию и исследованию оборудования и механизмов, работающих в условиях бортовой и килевой качки судна, и является усовершенствованием стенда по авт. св. № 1150149.
Целью изобретения является повышение качества моделирования.
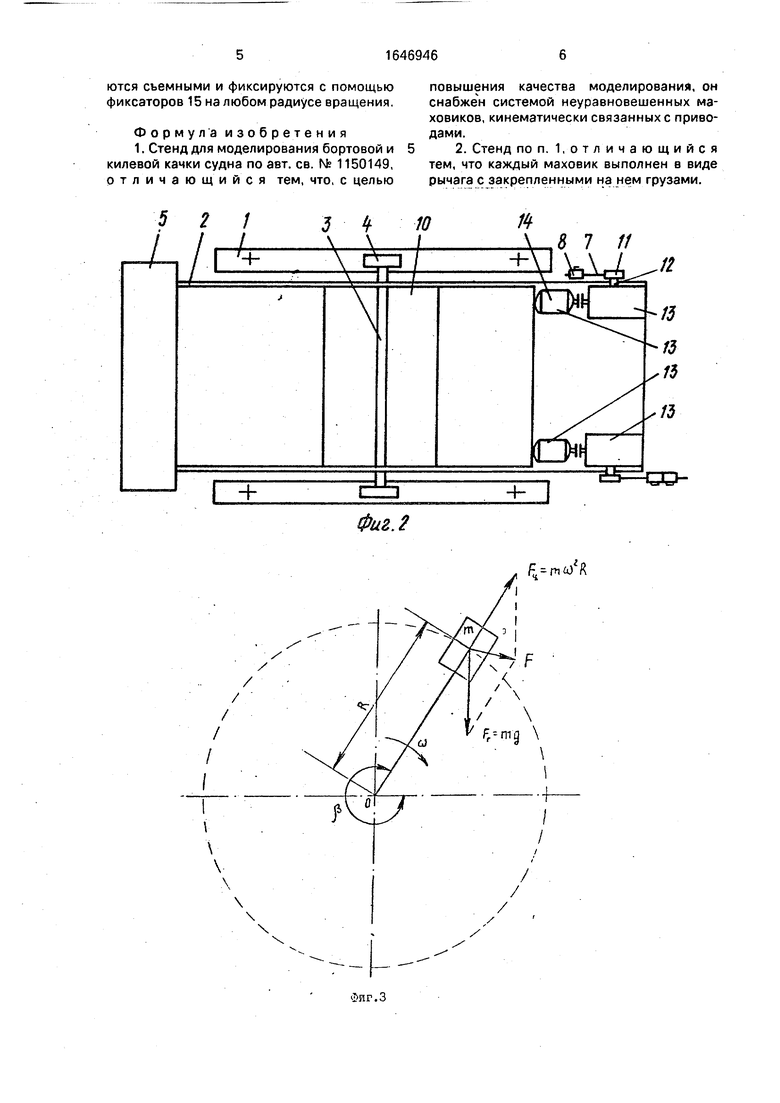
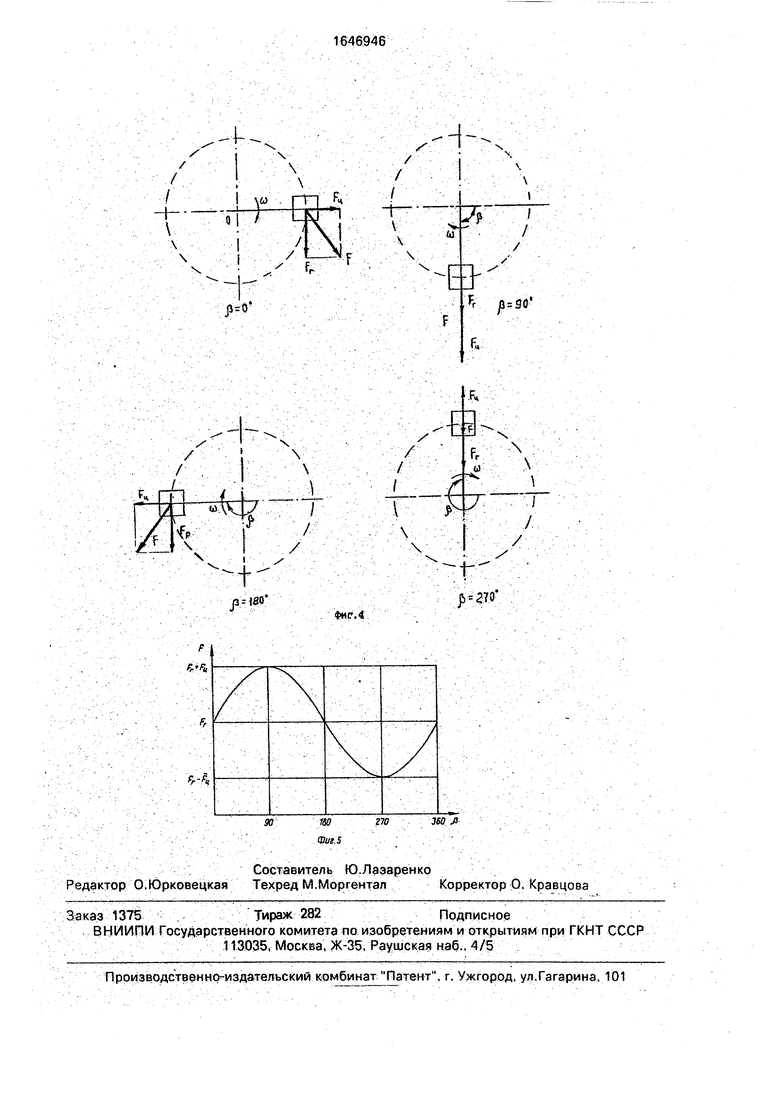
На фиг. 1 изображен стенд для моделирования бортовой и килевой качки судна, общий вид; на фиг. 2 - то же, план; на фиг. 3 - схема сил, действующих на груз маховика при его вращении вокруг оси 0; на фиг. 4 - схемы сил, действующих на груз маховика при различных углах его положения относительно балансира,, т.е. при /3 0°,/ 90°, / 180°, /3 270°; на фиг. 5 - график изменения величины проекции на нормаль к балансиру равнодействующей сил, действующих на груз при его вращении вокруг оси О в зависимости от угла (3 - его положения относительно балансира.
Стенд для моделирования бортовой и килевой качки судна содержит подвижно установленный на стойках 1 балансир 2, жестко связанный с осью 3, концы которой установлены в подшипниках 4, размещенных в стойках 1. На одном плече балансира 2 установлен исследуемый объект 5, а на другом - противовес 6 и маховик 7 со съемными грузами 8. Под осью 3 посредством растяжек 9 к балансиру 2 жестко присоединено твердое тело 10. Маховик 7 жестко связан с осью, которая установлена в подшипниках 11, закрепленных на балансире 2. Ось 12 соединена с приводом 13, который состоит из редуктора и электродвигателя 14, установленных на балансире2. Съемные грузы 8 с помощью фиксаторов 15 крепятся в любом месте маховика 7.
Как известно, на тело, движущееся в вертикальной плоскости по окружности с постоянной угловой скоростью ft. действуют центробежная сила Рци сила гравитации Fr (фиг. 3). Величина и направление равнодействующей F этих сил зависит от массы, радиуса вращения, частоты вращения и угла поворота /3 вращающегося тела. Максимальное значение F достигает при / 90°, т.е. при нижнем вертикальном положении вращающегося тела, а минимальное значение F имеет место при / 270°, т.е. при верхнем вертикальном положении вращающегося тела (фиг. 4). Таким образом, тело, вращающееся в вертикальной плоскости, установленное на балансире стенда (фиг. 1 и 2), воздействует на него силой F Fr + Fu, величина которой имеет rnin и max изменяется по синусоидальному закону (фиг. 5),
Моделирование бортовой и килевой качки судна осуществляется следующим образом.
В исходном положении, когда балансир
2 (фиг. 1 и 2) занимает горизонтальное положение, запускается электродвигатель 14, который через редуктор приводит во вращательное движение вокруг оси 12 маховик 7 с закрепленными на нем с помощью фикса0 торов 15 грузами 8. На балансир действует переменная по величине сила, которая вызывает раскачку стенда при совпадении частоты вращения маховика и собственной частоты колебаний стенда. Раскачка стенда
5 происходит до тех пор, пока балансир 2 не достигнет заданного угла отклонения, после чего электродвигатель 14 отключается и включается при уменьшении отклонения балансира на заданный угол. При этом
0 исследуемый объект 5 совершает возвратно-поступательное колебательное движение с переменным ускорением по дуге окружности, моделируя бортовую качку изменением наклона и килевую качку измене5 нием положения в вертикальной плоскости. Включение и отключение привода 13 маховика 7 (фиг. 1 и 2) при различных соотношениях углов а и ft (фиг. 5 ) приводит к ускорению или замедлению движения ба0 лансира 2, позволяет расширить диапазон моделируемых параметров качки, в частности дополнительного ускорения, испытываемого исследуемым объектом.
Моделирование различных частот качки
5 производится изменением частоты собственных колебаний маятниковой системы стенда, изменением массы твердого тела 10. Для раскачки маятниковой системы стенда, настроенной на новую собственную
0 частоту колебаний, необходимо изменить частоту вращения маховика 7, что достигается изменением числа оборотов двигателя 14. Возможность плавного-изменения частоты вращения маховика 7 позволяет точно
5 настраиваться на частоту собственных колебаний маятниковой системы, что позволяет более качественно регулировать амплитуду ее движения. Изменяя частоту вращения маховика 7 на качающейся маятниковой си0 стеме стенда, можно моделировать нерегулярную качку.
Для расширения диапазона воспроиз- водных частот и величин их влияния при моделировании нерегулярной качки на ба5 лансире 2 (фиг. 1 и 2) установлено два или более маховиков со своими приводами.
Для регулирования влияния воздействия маховика 7 на балансир 2 грузы 8 делаются съемными и фиксируются с помощью фиксаторов 15 на любом радиусе вращения.
Формула изобретения 1, Стенд для моделирования бортовой и килевой качки судна по авт. св. № 1150149, отличающийся тем, что, с целью
повышения качества моделирования, он снабжен системой неуравновешенных маховиков, кинематически связанных с приводами.
2. Стенд по п. 1,отличающийся тем, что каждый маховик выполнен в виде рычага с закрепленными на нем грузами.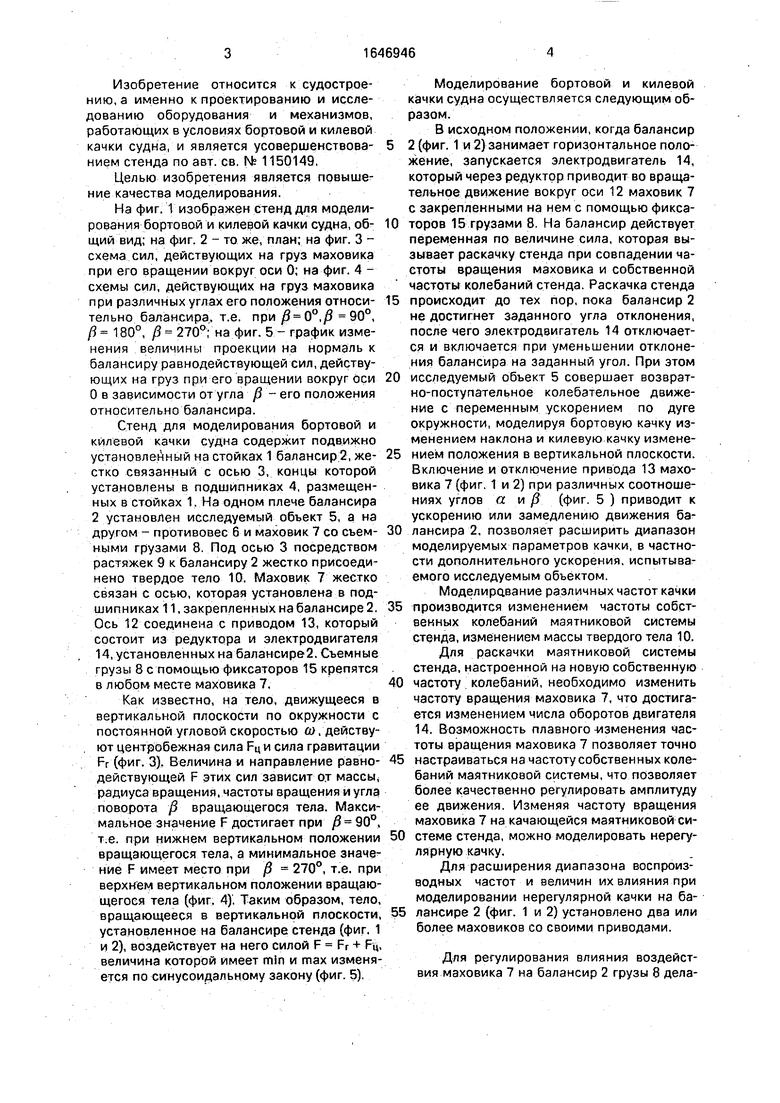
| название | год | авторы | номер документа |
|---|---|---|---|
| Стенд для моделирования бортовой и килевой качки судна | 1985 |
|
SU1244010A2 |
| Стенд для моделирования бортовой и килевой качки судна | 1983 |
|
SU1150149A1 |
| Установка для моделирования качки и вибрации судов | 1972 |
|
SU516930A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ СИЛ ПРИСОЕДИНЕННОЙ ИНЕРЦИИ И ДЕМПФИРОВАНИЯ ТЕЛ МЕТОДАМИ ИХ СВОБОДНЫХ ЗАТУХАЮЩИХ КОЛЕБАНИЙ В ЖИДКОСТИ | 2009 |
|
RU2425344C1 |
| ЛЕДОКОЛЬНАЯ СИСТЕМА ДЛЯ ПЛАВАЮЩИХ ТЕЛ | 2009 |
|
RU2483967C2 |
| ТУРБОДИНАМИЧЕСКОЕ СУДНО В.С.ГРИГОРЧУКА | 1997 |
|
RU2128597C1 |
| Судно | 1984 |
|
SU1273298A1 |
| СТАБИЛИЗИРОВАННАЯ ЗЕРКАЛЬНАЯ АНТЕННА СУДОВОЙ РЛС | 1997 |
|
RU2125326C1 |
| Способ контроля остойчивости судна | 1990 |
|
SU1782863A1 |
| Устройство для амортизирующего крепления надстройки к корпусу судна | 1986 |
|
SU1311998A1 |
Изобретение относится к судостроению и может быть использовано для испытаний судовых устройств и систем в условиях кач ки. Целью изобретения является повышение качества моделирования. Стенд представляет собой маятниковую систему, состоящую из балансира 2, на плечах которого установлены исследуемый объект 5 и противовес 6. Маятниковая система совершает колебательное движение по синусоидальному закону, амплитуда и период которого могут устанавливаться по требованию эксперимента. Для моделирования нерегулярной качки на балансире 2 установлены вращающиеся неуравновешенные маховики 7, масса и угловая скорость вращения могут изменяться, что позволяет получить целый спектр синусоидальных воздействий. 1 з.п. ф-лы, 5 ил.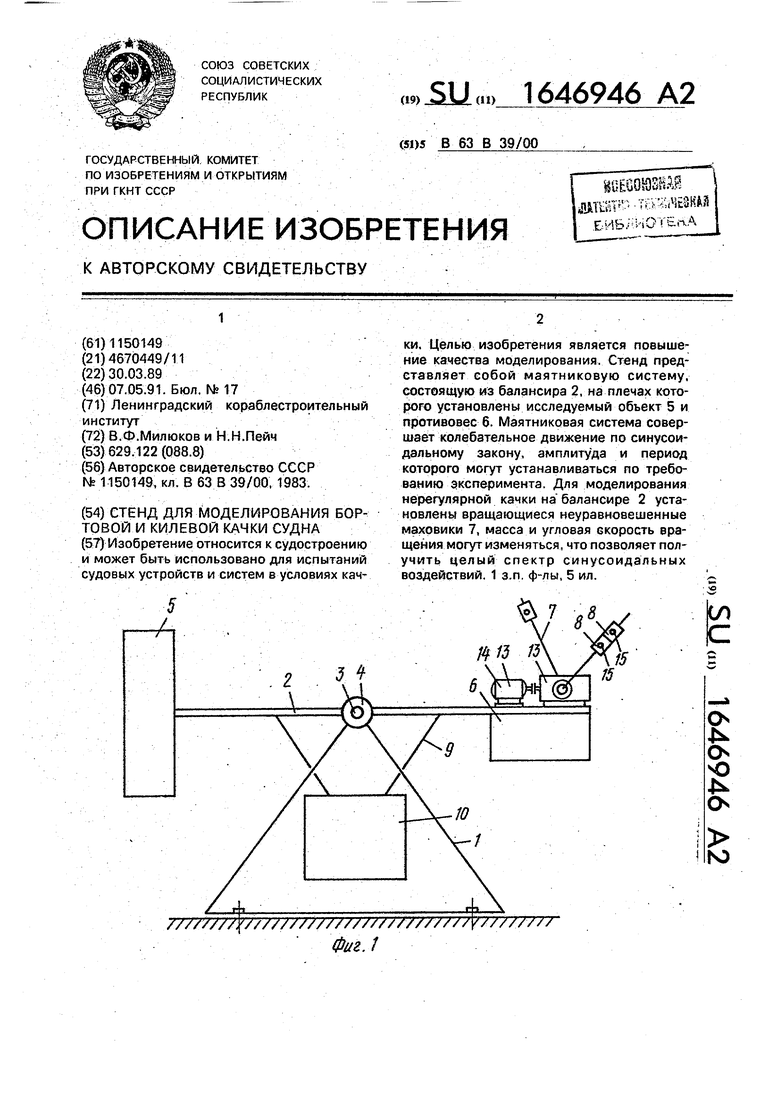
L±
Фиг.2
J/
-
| Стенд для моделирования бортовой и килевой качки судна | 1983 |
|
SU1150149A1 |
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
