(54) СИСТЕМЛ АВТОМ УСПОКО1-ТТЕЛЕМ , , 1 , Изобретение относитея к судостроению, в частности к системам автоматического управления успокоителем качки судна. Известны системы автоматического yTtравления успокоителем качки судна, содержашйм бсртодые рули с приводами nbBOjDOTa, обеспечивающие предельную конструктивно возможную величину бортовых рулей и включающие в собя гироскопические измерители параметров качкк, электричесжи связанные с блоком формирования сигнала утфавления, усилители сигнала управттения:,/ электрически связанные с управления насосов регулируемой проиэводительнооти, причем последние гидравлически связа ны с приводами поворота бортовbw рулей, флюгарки, кинематически свазанные с датч/пса ИЧЕСКОГО УПРАВЛЕНИЯ КИ СУДНА рулей, .шюшне критичоские углы атаки, что ггривопит к срыву потока и механичес КИМ ударам Б прк-водах. Ноль изобретения - повыптение глЬфектив- ноглн успокоителя качки и т зличение иадежнрсти н устойчлгвости работы системы управления. Лдя этого сиспема автоматического управлоив.я успокоителем кантон суд(ш снабж&нз яатчлком лога и прибором выработки пре- дельното угла атаки, который электрически связан с Прибором формирования сигнала уп : авления, датчиком лага, датчиками углов скоса потока и усипителямя сигналов управления каждого бортового руля; На чертеже показана схема системы управления успокоителем качки судна.
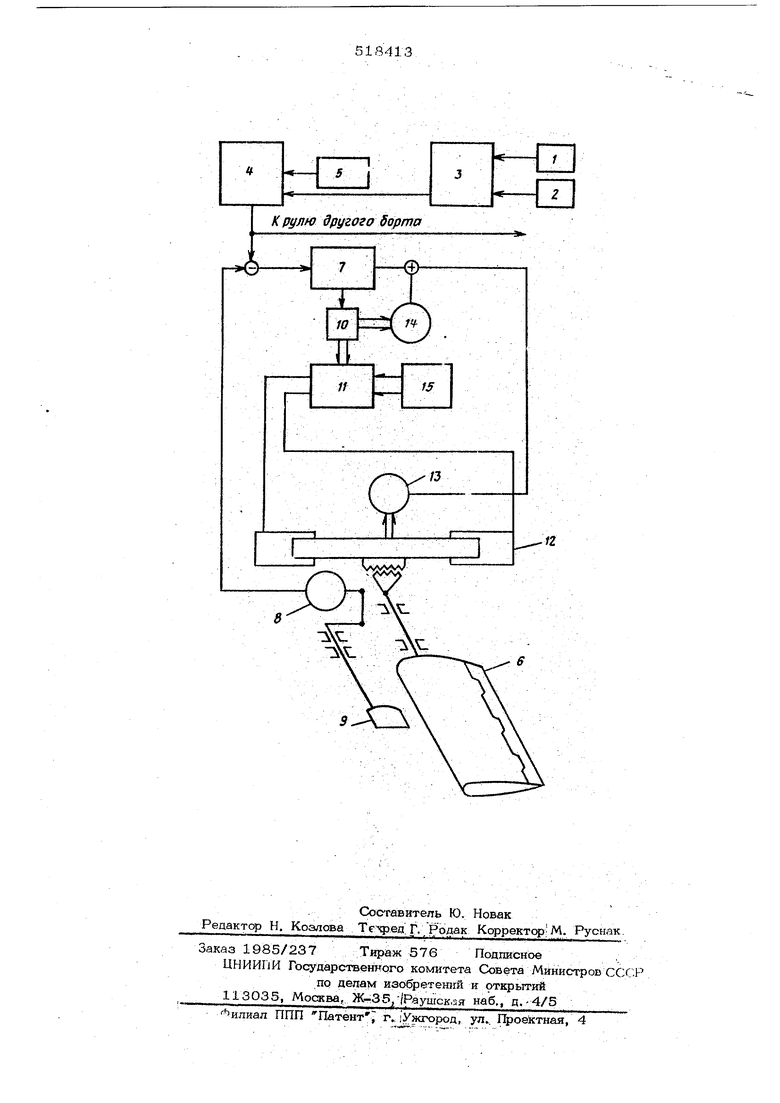
ПИЯ углов атаки бортовых рулей б в зависимости от скорости судна. Кроме того, система управления содержит элементы, участвующие в преобразовании сигнала управления каждь М 6q TOBbiM рулем 6 отдельно для правого и левого бортов судна, усилители 7, электрически связанные с ними датчики 8 угла скоса потока, в свою очередь кинематически связанные со статически отбалансированнь1ми флюгарками 9, гфиборы утфавле- уия 10 насосом 11 регулируемой щзоизво дительиости, кинематически связанные с приводами 12 поворота бортовьпс рулей 6, датчики 13 обратной связи угла поворота и кинематически соедиггенные с приборами уп- (равления 10, датчики 14 обратной связи угловой скорости поворота бортовых рулей 6. Насосы 11 регулируемой производительности с приводов от электродвигателей 15 гидравлически соединены с приводами 1 2 поворота бортовых рулей 6. Системы управления бортовыми рулями 6 правого и левого бортов электрически связаны между собой.
Система автоматического управления успокоителем качки судна работает следующим образом. Непрерывно вь рабатыьаемые г фоскопи ческими измерлтелями 1 и 2 параметров качки сигналы суммирут тся в бпоке 3 и фор мируют сигнал утфавления, 1фоиорцион.зль ный углу атаки бортовых рулей 6 при нулевых углах| скоса потока. Сигнал уттравления поступает в прмбор 4 В1,работки гфеделыгых углов атаки, где формируется сигнал допустимого угла атаки для данной скорости судна в соответствии с сигналом от лага 5. Одновременно при помощи расположенной перед бортовым рулем 6 флюгарки 9 и датчика 8 утла сксСа потока вырабатьюается электрический сигнал, пропоргшональный углу скоса потока, который суммируется при входе на усилитель 7 с сигналом допустимого угла атаки, уг-1еньи ая последний (и, о ответственно, угол перекладки бортового руля 6) три положительны, углах скоса потока, когда возникает ог сность превышения критических углов атаки бортового руля 6. При этом полиостью сохраняется эффектив - ность руля в зоне докритических углов атаки. При отрицательных yiviax скоса потока сш-иал допус- имого углл атаки (и угол пе-
рекладки бортового руля 6) увеличивается, что повышает эффективность успокоителя качки. Разделение сигнала допустимого угла атаки побортно обеспечивает учет услоВИЙ обтекания битового руля 6 каждого борта. Далее сигнал допустимого угла атакн бортового руля 6 каждого 5орта поступает на соответствующий усилитель 7, где ограничива ется по величине предельного ко структивного хода привода и суммируется с сигналами от датчика 13 обратной связи угла поворота и датчика 14 обратной связи угловой скорости поворота, обеспечивающих следящий режим работы системы автоматического управления. Вьработанный таким о€ зазом и усиленный сигнал поворота бортового РУ1Я 6 поступает в прибор 10 угфавячюихий при помощи насоса 11 регулируемой производительности и привода 12 поворотом бортового руля 6.
Таким образом система автоматического управления обеспещюает возможность безопа сной по условиям срыва потока перекладки бортовых рулей на любой угол, огфеделяемьй возможностью и конструкцией привода.Ф
изо ретения
р м у л а Система автоматического управления успокоителем качки судна, содержащим бортовые рули с приводами поворота, обеспечивающая предельную конструктивно вос-можную величину поворо- а бортовых рулей и включаю1дая в себя пфоскопические измерители параметров качки, электрически связанные с блоком формирования сигнала управления, усипигтели сигнала упфавления, электрически связанные с приборами управления насосов регулируемой производительности, причем поаедние гидравл чески св. .заны с приводами повирота бортовых рулей, флюгарки, кинематически свяпаиные с дат-иками угла скоса, пгтока, и датчики углов поворота бортовых руль., отличаю щ а я с .я те:л, что, с целью повышения эффективности успокоителя качки и увеличения надежности и устойчивости работы системы управления, она снабжена датчиком лага и гфибором вь эабот ки предельного угла атаки, который электрич; чески связан с ггрибором формирования спгнала упрг вления, дстчиком лага, датчиками углов потока и усилителями сигналов, управления каждого бортового руля.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ УСПОКОИТЕЛЯ КАЧКИ СУДНА С БОРТОВЫМ УПРАВЛЯЕМЫМ РАЗРЕЗНЫМРУЛЕМ | 1970 |
|
SU265745A1 |
| Успокоитель бортовой качки судна | 1981 |
|
SU969588A1 |
| Успокоитель бортовой качки судна | 1987 |
|
SU1411212A2 |
| Устройство для управления бортовыми рулями успокоителя качки судна | 1983 |
|
SU1147636A1 |
| Успокоитель бортовой качки судна | 1979 |
|
SU880873A1 |
| КОРАБЛЬ ГИДРОГРАФИЧЕСКОЙ И ПАТРУЛЬНОЙ СЛУЖБЫ | 2010 |
|
RU2459738C2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ УСПОКОИТЕЛЕМ КАЧКИ СУДНА | 1991 |
|
RU2013295C1 |
| КОРАБЛЬ ВОДОИЗМЕЩЕНИЕМ КЛАССА ЭСМИНЦА (ВАРИАНТЫ) | 2006 |
|
RU2300477C1 |
| СИСТЕМА ДЛЯ АВТОМАТИЧЕСКОЙ СТАБИЛИЗАЦИИ СУДНА НА ПОДВОДНЫХ КРЫЛЬЯХ | 1970 |
|
SU262644A1 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ БОРТОВЫМИ РУЛЯМИ УСПОКОИТЕЛЯ КАЧКИ СУДНА | 1971 |
|
SU314685A1 |