Изобретение относится к судостроению, а именно к системам автоматического управления успокоителя качки судна с бортовыми управляемыми разрезными рулями для стабилизации качки.
Известны системы автоматического управления успокоителя качки судна с бортовыми управляемыми разрезными рулями, содержащие магнитно-транзисторный усилитель, электрически связанный с гироскопическими датчиками угла и угловой скорости качки судна, вращающимися трансформаторами обратной связи через переключатель и электроприводом управляющего золотника гидроусилителя, регулирующего работу гидромеханического привода баллера руля.
Целью изобретения является повышение эффективности умерения качки судна путем устранения отклонения величины коэффициента подъемной силы руля от требуемого значениявследствие скоса набегающего потока на закрылке.
Это достигается тем, что система выполнена с масштабным трансформатором и фазоЧувствительным выпрямителем, включенными между собой последовательно, причем входные обмотки масштабного трансформатора соединены с роторными обмотками вращающихся трансформаторов датчиков углов атаки и перекладки, которые включены встречно
через переключатель, а выход фазочувствительного выпрямителя соединен с устройством, суммирующим сигналы управления и обратной связи.
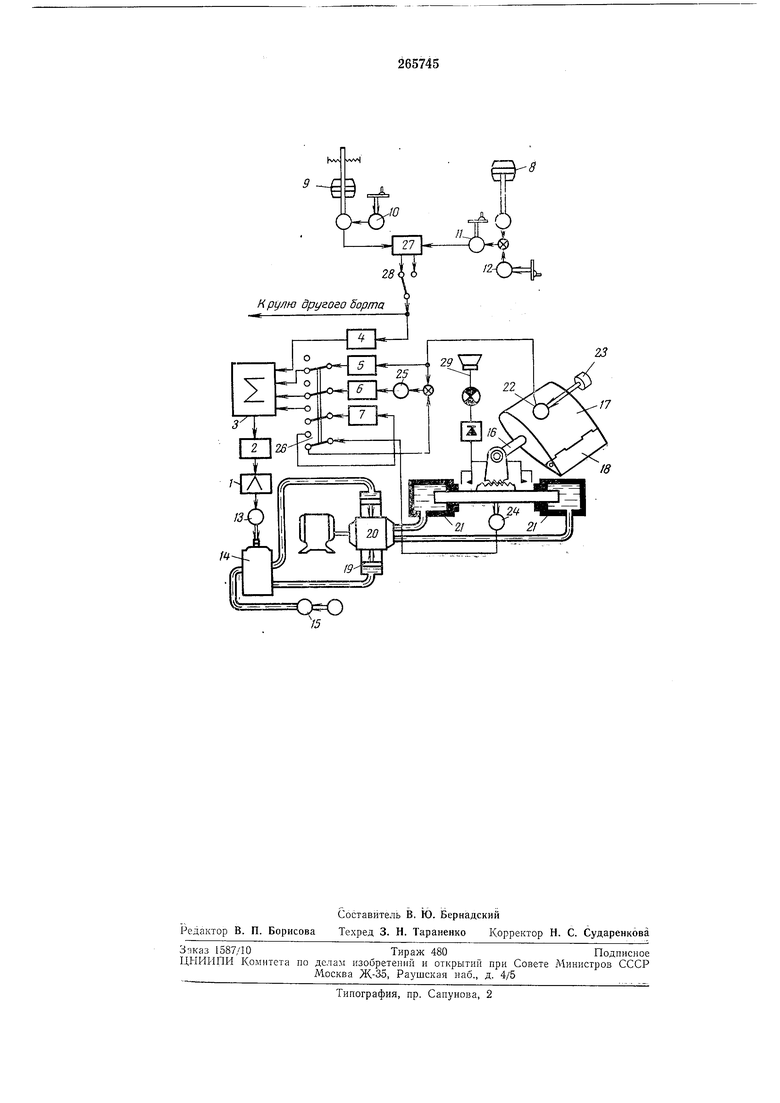
На чертеже схематически изображена описываемая система.
Система содержит магнитно-транзисторный усилитель /, который последовательно соединен с модулятором 2, суммирующим устройством 3 и фазочувствительными выпрямителями 4-7. Усилитель 1 электрически связан с гироскопическим датчиком 8 угла качкИ судна, гироскопическим датчиком 9 угловой скорости качки, масштабными трансформаторами 10, 11, а также с блоком 12 для выборки статического крена. Магнитно-транзисторный усилитель служит для усиления сигналов управления и обратной связи. Сигнал с усилителя подается на электропривод 13 управляющего золотника (на чертеже не показан) гидроусилителя 14, который сообщается с автономным электронасосом 15. Последний подает масло в гидроусилитель, а от него - к гидромеханическому приводу баллера
16, соединенному с основной частью 17 бортового разрезного руля и закрылком 18. Гидромеханический привод баллера содержит серводвигатель 19, гидравлически связанный с насосом 20 переменной производительности,
зубчатую рейку кинематически соединен с баллером 16. Внутри основной части /7 пера руля встроен вращающийся трансформатор 22 обратной связи, соосно соединенный со статически отбалансированной флюгаркой 23, самоориентирующейся в потоке с нулевым углом атаки. В систему входит также вращающийся трансформатор 24, вырабатывающий электрический сигнал обратной связи, пропорциональный углу перекладки руля при установке последнего в нулевое положение на время уборки и выдвижения. Для повышения эффективности измерения качки судна путем устранения отклонения величины коэффициента подъемной силы рулей от требуемого значения вследствие скоса набегающего потока на закрылке 18 система выполнена с масштабным трансформатором 25, который включен последовательно с фазочувствительным выпрямителем 6. Входная обмотка масштабного трансформатора соединена с вращающимися трансформаторами 22, 24, роторные обмотки которых включены встречно через переключатель 26. Выход фазочувствительного выпрямителя 6 соединен с устройством 3, суммирующим сигналы управления и обратной связи.
Для выбора режима умерения качки судна или его раскачивания служит распределительное устройство 27 и переключатель 28 для изменения фазы управления. Устройство 29 предназначено для звуковой и световой сигнализации о пределах угла перекладки руля.
Система работает следующим образом.
Гироскопические датчики 8, 9 непрерывно измеряют угол и угловую скорость качки судна и вырабатывают электрические сигналы управления, пропорциональные указанным параметрам. Масштабные трансформаторы 10, 11 и блок 12 для выборки статического крена корректируют величину сигналов управления, распределительное устройство 27 и переключатель 28 изменяют фазу сигнала и тем самым режим работы успокоителя: умерение качки или раскачивание.
Электрические сигналы управления и обратной связи с датчиков поступают на фазочувствительные выпрямители 4-7, далее в суммирующее устройство 3, преобразуются модулятором 2 и усиливаются магнитно-транзисторным усилителем . L С выхода усилителя сигнал рассогласования передается электроприводу 13, под действием которого возвратно-поступательно перемещается управляющий золотник гидроусилителя 14. Гидроусилитель регулирует работу серводвигателя 19, который изменяет производительность насоса 20, подающего под давлением масло в сервомотор 21, под действием чего плунжер сервомотора перемещается возвратно-поступательно и через зубчатую рейку изменяет положение баллера 16, вращая его вокруг собственной оси.
В режиме умерения качки используются электрические сигналы обратной связи от вращающегося трансформатора 22 датчика угла атаки и вращающегося трансформатора 24 датчика угла перекладки, коммутируемые переключателем 26.
При повороте руля флюгарка 23 сохраняет свое положение относительно набегающего потока воды с углом атаки, равным нулю. ТаКИМ образом, вырабатывается электрический сигнал, пропорциональный истинному углу атаки основной части руля. Одновременно с помощью вращающихся трансформаторов 22, 24 вырабатывается сигнал разности углов
атаки и перекладки, который передается на входную обмотку масштабного трансформатора 25.
Включение масштабного трансформатора, сигнал с которого через фазочувствительный
выпрямитель 6 поступает в устройство, суммирующее сигналы управления и обратной связи, обеспечивает выработку системой управления результирующего сигнала для поворота руля на угол, компенсирующий скос
потока на закрылке. Если угол атаки больше, чем угол перекладки, то сигнал обратной связи уменьшается на величину, пропорциональную разности электрических сигналов вращающихся трансформаторов 22, 24, с учетом влияния закрылка, что приводит к увеличению разности между сигналом управления и обратной связи и вызывает дополнительный поворот руля на требуемый угол.
Предмет изобретения
Система автоматического управления успокоителя качки судна с бортовым управляемым
разрезным рулем, содержащая магнитнотранзисторный усилитель, электрически связанный с ги|)оскопическими датчиками угла и угловой скорости качки судна, с вращающимися трансформаторами обратной связи через
переключатель и электроприводом управляющего золотника гидроусилителя, регулирующего работу гидромеханического привода баллера руля, отличающаяся тем, что, с целью повышения эффективности системы путем
устранения отклонения .величины коэффициента подъемной силы руля от требуемого значения вследствие скоса набегающего потока на закрылке, она выполнена с масштабным трансформаторам и фазочувствительпым
выпрямителем, включенными меледу собой .последовательно, причем входные обмотки масштабного тра|НсфО|рматора соединены с роторными обмотками вращающихся трансформаторов датчиков углов атаки и перекладки, которые включены встречно через переключа тель, а выход фазочувствительного выпрямителя соединен с устройством, суммирующим сигналы управления и обратной связи.
23
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления бортовыми рулями успокоителя качки судна | 1983 |
|
SU1147636A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ УСПОКОИТЕЛЕМ КАЧКИ СУДНА | 1991 |
|
RU2013295C1 |
| Автоматическая система управления рулемСудНА | 1979 |
|
SU839859A1 |
| Успокоитель бортовой качки судна | 1981 |
|
SU969588A1 |
| Устройство для управления успоко-иТЕлЕМ КАчКи СудОВ | 1979 |
|
SU796069A2 |
| Система автоматического управления успокоителем качки судна | 1974 |
|
SU518413A1 |
| Успокоитель бортовой качки судна | 1979 |
|
SU880873A1 |
| Устройство для управления успокоителем качки судов | 1975 |
|
SU524731A1 |
| Система управления бортовыми рулями успокоителя качки судна | 1976 |
|
SU597591A1 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ БОРТОВЫМИ РУЛЯМИ УСПОКОИТЕЛЯ КАЧКИ СУДНА | 1971 |
|
SU314685A1 |