(54) ВЕРТИКАЛЬНЫЙ КОНВЕЙЕР
| название | год | авторы | номер документа |
|---|---|---|---|
| Вертикально-замкнутый тележечный конвейер | 1986 |
|
SU1375531A1 |
| КРИВОЛИНЕЙНЫЙ МНОГОПРИВОДНОЙ КОНВЕЙЕР С ПОДВЕСНОЙ ЛЕНТОЙ | 2001 |
|
RU2209167C2 |
| КРИВОЛИНЕЙНЫЙ КОНВЕЙЕР С ПОДВЕСНОЙ ЛЕНТОЙ | 2001 |
|
RU2207971C2 |
| Вертикальный конвейер для штучных грузов | 1988 |
|
SU1549863A1 |
| СПОСОБ ОБРАБОТКИ СЫПУЧИХ ГРУЗОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2203207C2 |
| КОЛЬЦЕВОЙ КОНВЕЙЕР | 2003 |
|
RU2255031C1 |
| КОНВЕЙЕР С ПОДВЕСНОЙ ЛЕНТОЙ | 2001 |
|
RU2206486C1 |
| КРИВОЛИНЕЙНЫЙ МНОГОПРИВОДНОЙ КОНВЕЙЕР С ПОДВЕСНОЙ ЛЕНТОЙ ДЛЯ ВЕРТИКАЛЬНОГО ПОДЪЕМА ГРУЗА | 2001 |
|
RU2209752C2 |
| КОНВЕЙЕР ДЛЯ ТРАНСПОРТИРОВАНИЯ ШТУЧНЫХ ГРУЗОВ | 1967 |
|
SU198225A1 |
| СПОСОБ ОБРАБОТКИ СЫПУЧИХ ГРУЗОВ И УСТРОЙСТВО ОБРАБОТКИ СЫПУЧИХ ГРУЗОВ | 2001 |
|
RU2216497C2 |
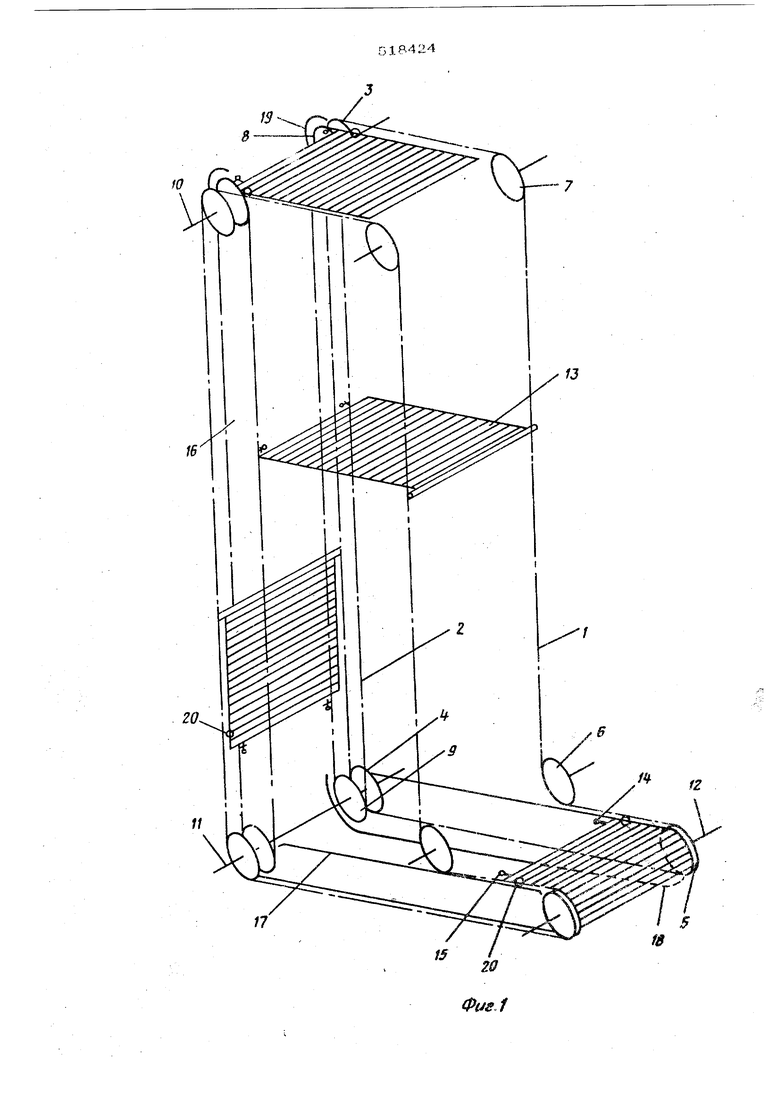
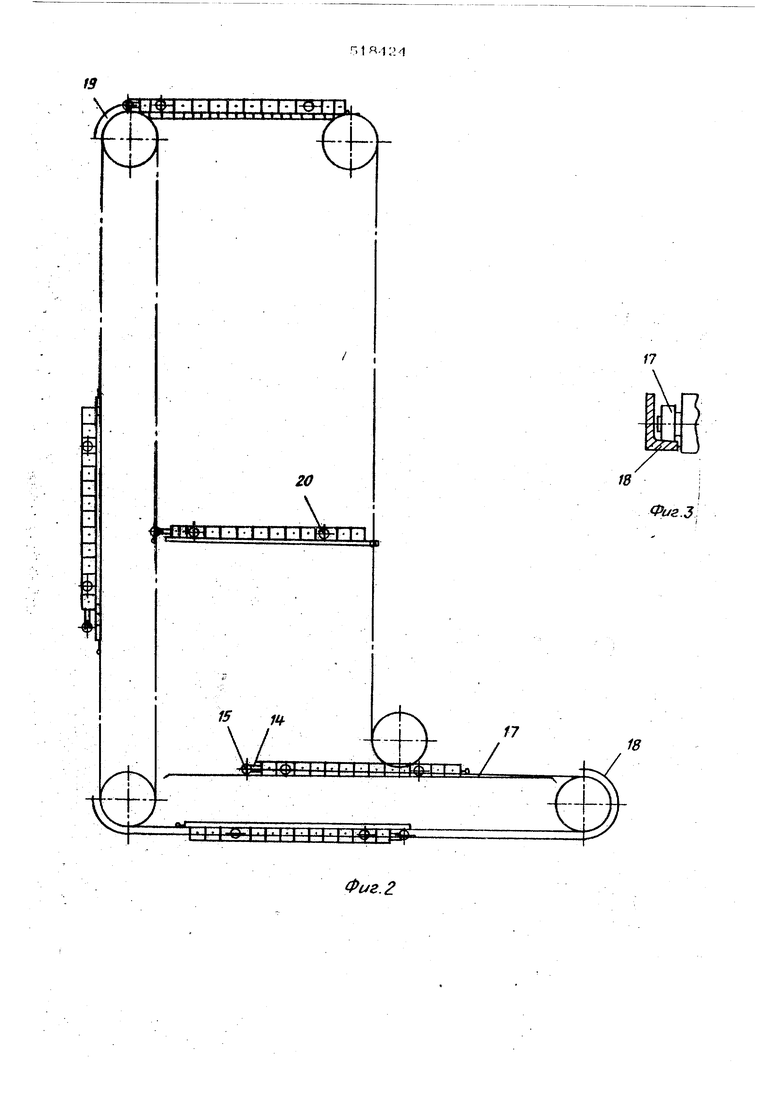
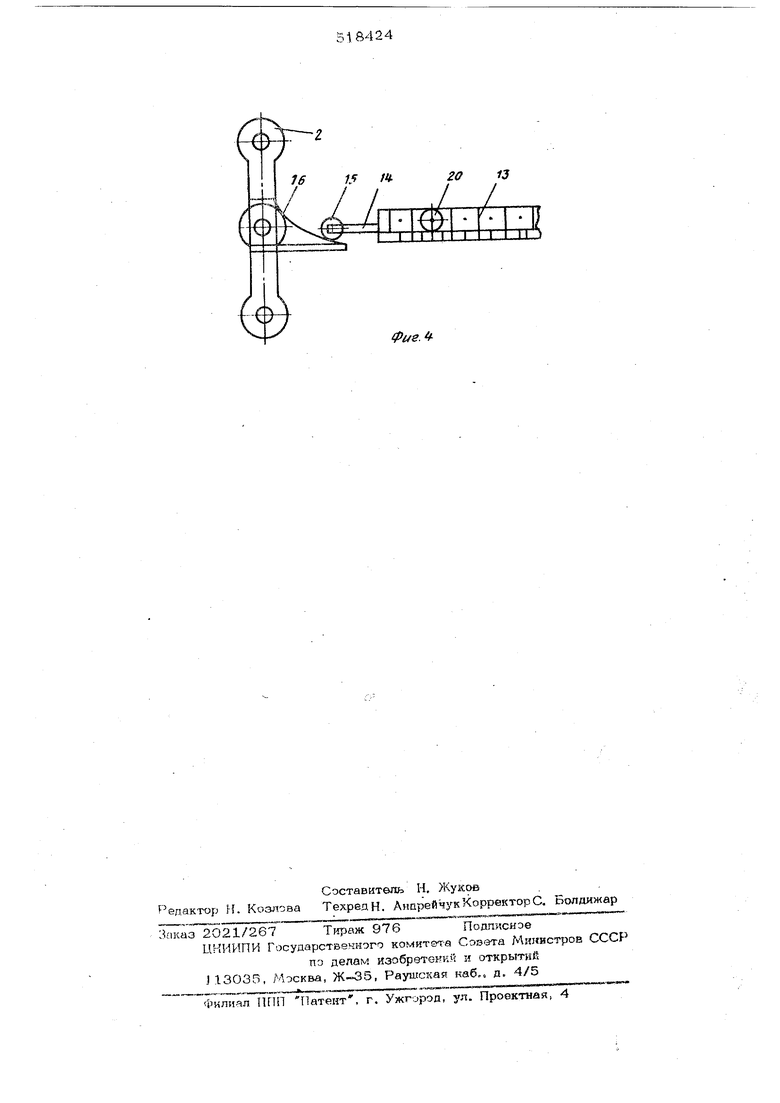
Изобретение относится к подъемно-транепортному оборудованию, в частности к в)ти калъным конвейерам. Известны вертикальные конвейеры, включающие грузовые платформы, один конец которых закреилен на бесконечных тяговых цепях, а другой входит в зацепл-енне с захва тами , установленными на поддерживающих цепях. Цель изобретения - упрошение конструкции захватов и уменьшение динамических нагрузок на поддерживающие цепи. Это достигается тем, что захваты выполнены в виде кронштейнов с криволинейной i пдэверхностью с возможностью взаимодействия ее с роликами, установленнь1ми на фиг. 1 показан предлагаемый конвейе : общий вид; на фиг. 2 - то же, вид сбоку; на фиг. 3 - элемент конструкции конвейера; на фиг. 4 - конструкция захватов. Две пары цепей 1 и 2 охватывают приводные, отклоняющие и натяжные звездочки 3-9, образуя -образный вертикальный конвейер, ездочки закреплены на приводнэм валу 10, общем валу 11 и валу 12, Вертикальные ветви цепей 2 параллельны друг другу я яежат в одной плоскости, а ;вер)тикальные ветви цепей 1 параллельны ;ветвям цепей 2 и удалены от них с таким расчетом, чтобы между этими ветвями мог-|ла разместиться грузовая платформа 13 в горизонтальном положении. I На цепях 1 закреплены одной своей стороной грузовые платформы 13, на противо|положных сторонах которых закреплены 14 с роликами 15 на концах. На цепях |2 установлены захваты 16, выполненные в |Виде кронштейнов с криволинейной поверхностью. На конвейере установлены направпяюише 17-19, с которыми взаимодействуют ролики 20 платформы 13. При подходе платформы 13с грузом к рабочему вертикальному участку трассы, она двумя штырями 14 с роликами 15 входит |В зону трассы пары цепей 2 и подхватывает|СЯ прйбпижаюшимися в этот момент эахва-
, включая, таким офаоом, в работу jto граисцр ирэвке груза пару цопей 2.
Две -направляющие 17, идущие параллельно цепям 1, предназначены для приема и направления платформ ЦЗ на участке загрузки(если подъемник работает на подъем груза или разгрузку). Расстотгае между eanpatiляюишми 17 согласовано с шириной платформы 13 и роликами 20. Направляющие 18 и 19, взаимодействуя с роликами 2О, поцдержийлют платформу 13 на нижнем горизонтальнЬм участке и направляют ее на участках поворота внизу у вала .12 наверху у йала Ю, а также предотвращают раскачивание при движении платформы 13 в йертиКельном поп .)женни на ;)ri::icTiM учостко конвейера.
формула и сэ о б р о т к н и я
Вертикпльный конвейер, включающий грузовые платформы опин конец которых закреплен на бесконечных тяговых цепях, а другой входит в зацепление с захватами, установленными на поддерживающих цепях, о т л и ч а ю ш и и с я тем, что, с пелью упрощения конструкции захватов и уменьшения динамических нагрузок на поддерживающие цепи, захваты выполнены в виде кронштейнов с криволинейной поверхностью с возможностью взаимодействия ее с роликами, установленными на пла.тформе.
Л:Ы111:л1:.134
I Y 1 1 1 . . I 1 I I I f
20
15 1Ц.
Ул .1.1.1.1.1
17
...AlZ...u/
Фиг. 2
ifS.
