(54) СТАНОК ДЛЯ ОБМОТКИ СТАТОРОВ ЭЛЕКТРИЧЕСКИХ МАШИН
прижимной ролик 11 и направляющий желоб 12.
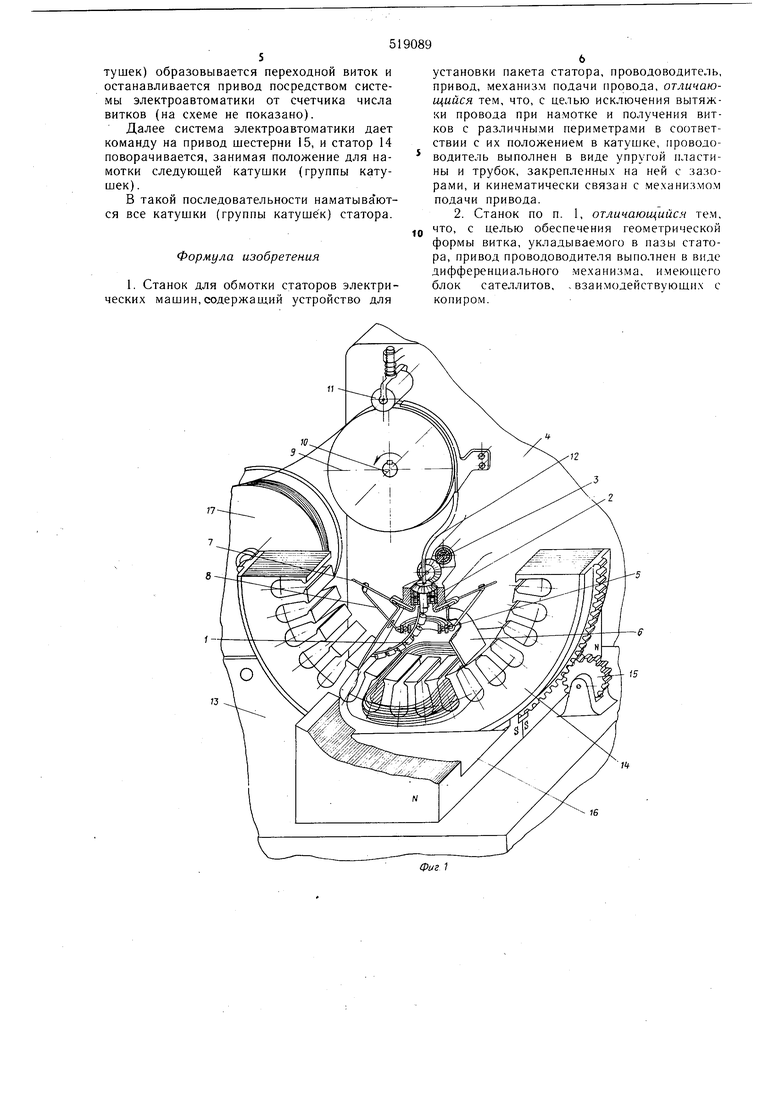
В корпусе 13 станка установлен обматываемый статор 14, для поворота которого предусмотрена шестерня 15.
Статор 14 является частью разветвленной электромагнитной системы 16. К началу и концу обмоточного провода, сматываемого с бобины 17, прикладывается разность потенциалов.
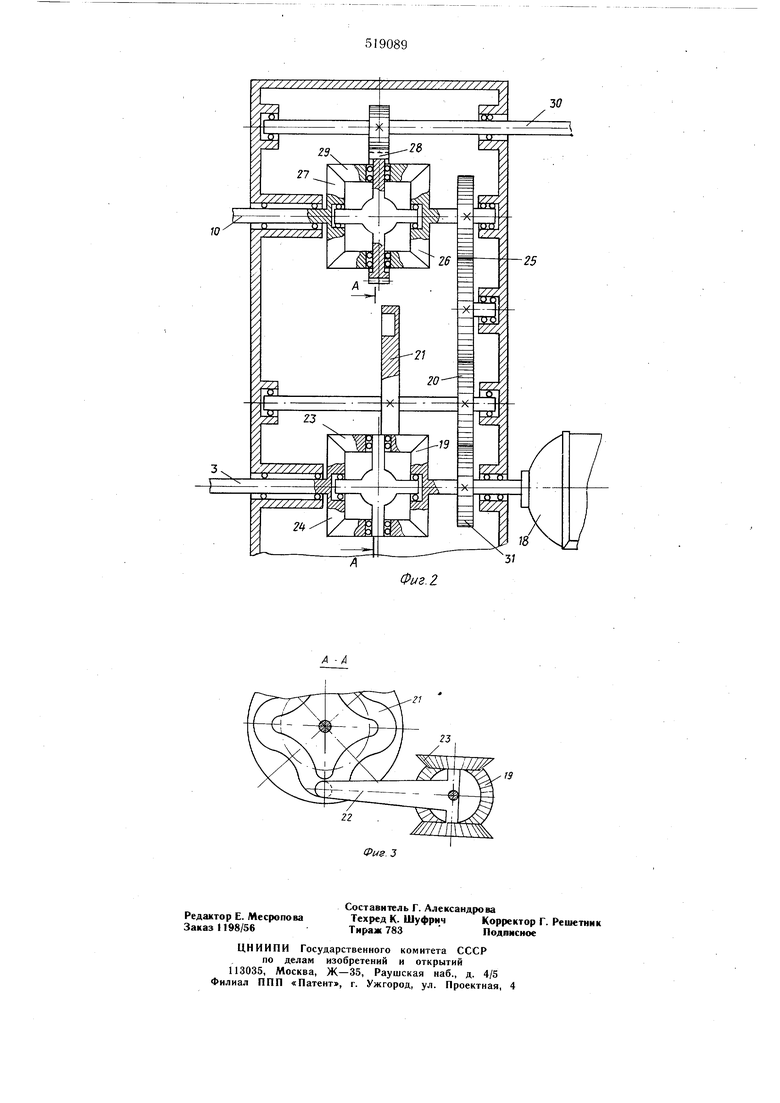
Привод 4 (фиг. 2) конструктивно состоит из электродвигателя 18, шестерен 19 и 20, копира 21, поводка 22, сателлитов 23 дифференциала, шестерни 24, передачи 25, шестерен 26, 27 и 28, сателлитов 29 дифференциала, шестеренчатого вала 30, шестерни 31.
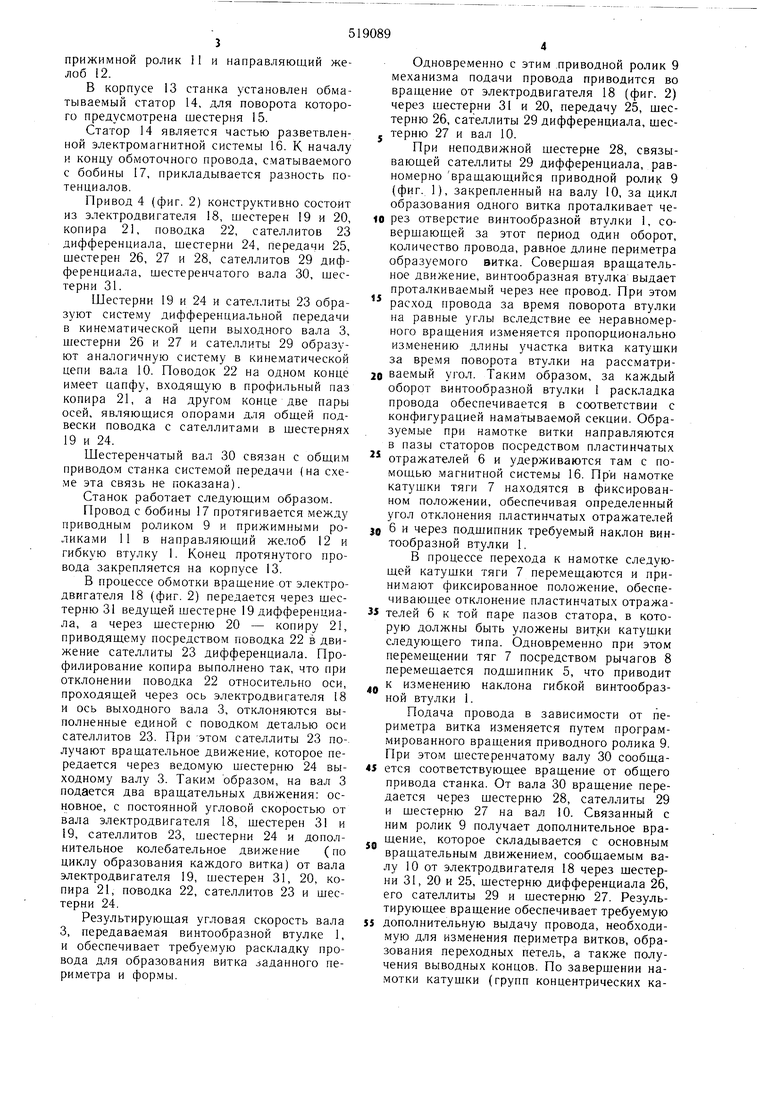
Шестерни 19 и 24 и сателлиты 23 образуют систему дифференциальной передачи в кине.матической цепи выходного вала 3, шестерни 26 и 27 и сателлиты 29 образуют аналогичную систему в кинематической цепи вала 10. Поводок 22 на одном конце и.меет цапфу, входящую в профильный паз копира 21, а на другом конце две пары осей, являющися опорами для общей подвески поводка с сателлитами в шестернях 19 и 24.
Шестеренчатый вал 30 связан с общны приводо.м станка системой передачи (на схе.ме эта связь не показана).
Станок работает следующим образом.
Провод с бобины 17 протягивается .между приводным роликом 9 и прижимными роликами 11 в направляющий желоб 12 и гибкую втулку 1. Конец протянутого провода закрепляется на корпусе 13.
В процессе обмотки вращение от электродвигателя 18 (фиг. 2) передается через шестерню 31 ведущей шестерне 19 дифференциала, а через шестерню 20 - копиру 21, приводящему посредством поводка 22 в движение сателлиты 23 дифференциала. Профилирование копира выполнено так, что при отклонении поводка 22 относительно оси, проходящей через ось электродвигателя 18 и ось выходного вала 3, отклоняются выполненные единой с поводком деталью оси сателлитов 23. При этом сателлиты 23 по-, лучают вращательное движение, которое передается через ведомую шестерню 24 выходному валу 3. Таким образом, на вал 3 подается два вращательных движения: основное, с постоянной угловой скоростью от вала электродвигателя 18, щестерен 31 и 19, сателлитов 23, шестерни 24 и дополнительное колебательное движение (по циклу образования каждого витка) от вала электродвигателя 19, шестерен 31, 20, копира 21, поводка 22, сателлитов 23 и шестерни 24.
Результирующая угловая скорость вала 3, передаваемая винтообразной втулке 1, и обеспечивает требуе.мую раскладку провода для образования витка заданного периметра и фор.мы.
Одновре.менно с этим приводной ролик 9 механизма подачи провода приводится во вращение от электродвигателя 18 (фиг. 2) через шестерни 31 и 20, передачу 25, шестерню 26, сателлиты 29 дифференциала, шестерню 27 и вал 10.
При неподвижной щестерне 28, связывающей сателлиты 29 дифференциала, равномерно вращающийся приводной ролик 9 (фиг. 1), закрепленный на валу 10, за цикл образования одного витка проталкивает через отверстие винтообразной втулки 1, совершающей за этот период один оборот, количество провода, равное длине пери.метра образуемого витка. Совершая вращательное движение, винтообразная втулка выдает проталкиваемый через нее провод. При этом расход провода за время поворота втулки на равные углы вследствие ее неравномерного вращения изменяется пропорционально изменению длины участка витка катущки за время поворота втулки на рассматриваемый угол. Таким образом, за каждый оборот винтообразной втулки 1 раскладка провода обеспечивается в соответствии с конфигурацией наматываемой секции. Образуемые при намотке витки направляются в пазы статоров посредством пластинчатых
отражателей 6 и удерживаются там с помощью магнитной системы 16. При намотке катущки тяги 7 находятся в фиксированном положении, обеспечивая определенный угол отклонения пластинчатых отражателей
0 6 и через подшипник требуемый наклон винтообразной втулки 1.
В процессе перехода к намотке следующей катушки тяги 7 перемещаются и принимают фиксированное положение, обеспечивающее отклонение пластинчатых отражателей 6 к той паре пазов статора, в которую должны быть уложены катушки следующего типа. Одновременно при этом перемещении тяг 7 посредством рычагов 8 перемепдается подщипник 5, что приводит
. к изменению наклона гибкой винтообразной втулки 1.
Подача провода в зависимости от периметра витка изменяется путем программированного вращения приводного ролика 9. При этом шестеренчатому валу 30 сообщается соответствующее вращение от общего привода станка. От вала 30 вращение передается через щестерню 28, сателлиты 29 и щестерню 27 на вал 10. Связанный с ним ролик 9 получает дополнительное вращение, которое складывается с основным вращательным движением, сообщаемым валу 10 от электродвигателя 18 через шестерни 31, 20 и 25, шестерню дифференциала 26, его сателлиты 29 и шестерню 27. Результирующее вращение обеспечивает требуемую
дополнительную выдачу провода, необходимую для изменения периметра витков, образования переходных петель, а также получения выводных концов. По заверщении на.мотки катушки (групп концентрических катушек) образовывается переходной виток и останавливается привод посредством системы электроавтоматики от счетчика числа витков (на схеме не показано).
Далее система электроавтоматики дает команду на привод шестерни 15, и статор 14 поворачивается, занимая положение для намотки следующей катушки (группы катушек).
В такой последовательности наматываются все катушки (группы катушек) статора.
Формула изобретения
1. Станок для обмотки статоров электрических машин, сх держаш.ий устройство для
установки пакета статора, проводоводитель, привод, механизм подачи провода, отличающийся тем, что, с целью исключения вытяжки провода при намотке и получения витков с различными периметрами в соответствии с их положением в катушке, проволоводитель выполнен в виде упругой пластины и трубок, закрепленных на ней с зазорами, и кинематически связан с механизмом подачи привода.
2. Станок по п. 1, отличающийся тем, что, с целью обеспечения геометрической формы витка, укладываемого в пазы статора, привод проводоводителя выполнен в виде дифференциального механизма, имеющего блок сателлитов, , взаимодействуюших с копиром.
12
т
16
фиг 1
X
Ю
| название | год | авторы | номер документа |
|---|---|---|---|
| Станок для намотки статоров | 1983 |
|
SU1156200A1 |
| Станок для изготовления катушечных групп электрических машин | 1978 |
|
SU868934A1 |
| Станок для намотки статоров электрических машин | 1979 |
|
SU790077A2 |
| Станок для намотки статора электрической машины | 1978 |
|
SU765941A1 |
| Станок для намотки статоров электрических машин | 1977 |
|
SU702463A1 |
| Станок для намотки и укладки катушек в пазы статора электрических машин | 1980 |
|
SU907711A1 |
| Станок для намотки статоров электрических машин | 1990 |
|
SU1757030A1 |
| Станок для намотки статоров электрических машин | 1976 |
|
SU652657A1 |
| Станок для намотки статоров электрических машин | 1982 |
|
SU1163428A1 |
| Многослойная электрическая катушка с витками прямоугольной формы и без межслойной изоляции | 1959 |
|
SU132340A1 |