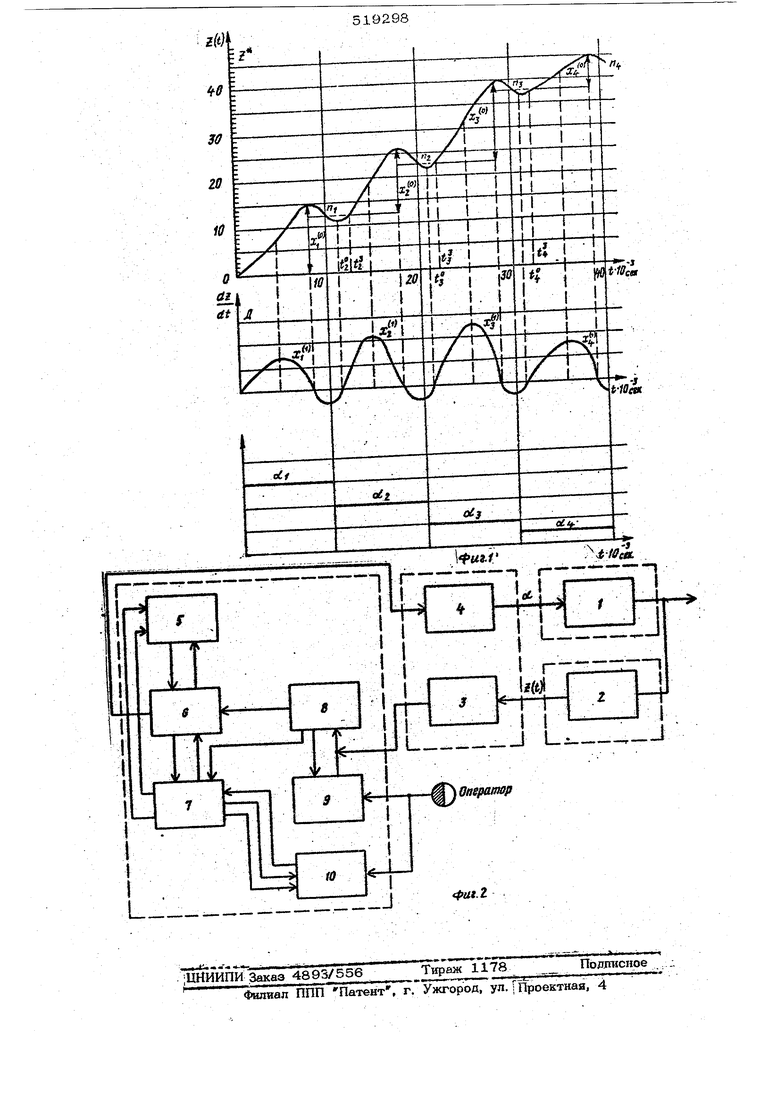
(54) МАШИНА ДЛЯ КОНТАКТНОЙ ТОЧЕЧНОЙ СВАРКИ С СИСТЕМОЙ АВТОМАТИЧЕСКОЙ ПОДСТРОЙКИ ее пронзводлой и угла поджигания; на фиг. 2 «- предсзгавлепа блок - схема систе мы автоматической подстройки. Реализация пртпздшта адаптивного управления процессом сварки основана на следую щих щэедположешшх. Состошгае процесса сварки в момент i задается величиной l(fe) теплового расши1)еиий металла в зоне сварки ( в мм). Процесс начинается со значения г (О) О. Угфавлеипе осуществляется установкой в KioMenrt-K ПГ/ш (к « 0,1,2) значений угла поджигания d. о(., , лежащего в пределахf S oC.fi fr I(Я :Если в момент -fe Kit /ш величина 1 (t) принимает значение г. 1кК/ш) г,, а управ- I лением )Ш интервале Т (к.ТГ/ш sts(.к l)I7/ujy было cl- , то однозначно определяется отреосж траекч ории измеиения: 2.ct при t Устройство управления должно вырабатывать последовательность ii . таким образом, чтобы довести т-епловое рас ширение до значения 2.(t) -г. за минимальное время t при ограш1че1Шях: -f-S D(0st.st) где В - постоянная, определяемая свой СТПОМТ1 металла ( нарушение этого условия приводит к выплеску); 2. max. r(t) teT таково, что (см.фнг.1 Необходимость введения адапташп в матину обусловлена неопределенностыр тепловых характеристик процесса сварки, которые, в свою очередь, задают вид у шстка траектории Z t -1) , t € Т при заданИаобретопис реализует проНЫХ Т- , к к адаптивно - oпти aльпoгo веде1шя процесса сварки. При синтсзо алго1штма упраплешш испол зуются слодуюипю ос1О111Ш1С требе занля. По.шким хЦг.,л max 7. (t)-z. ,c-4Zi,oC к (г..ос.. ) г i (Л). Г икшш сС ( г, сС ), (зО,1 Moiiaromii.1 )(1- i:a промежутке (1) при. 1,0«1-яг 5 8 4 (В), При любом 8. , О и г « х , сущесгаует такое i, «гйх что :r(&,d.)s3-fcj,,eLJsai где - неко-горые положительные константы. Будем считать также, что оптимальнотгъ послеAOBaTenbHOCiB stjsjci, э1,..можно заменить на. шляопняемость при каждом К .условии, / b,dj),.V«n np454 s«, «D. , : Опишем алгоритм управлений. Фуккц.га X (2.,),5(, (,Z,cL} rannDOKCHMHDV- i .гаппроксимиру|ем линейными, считая что при некоторых значениях параметров ,-S( 3 0,i, S « 0,4,2.) выполнено ,et)-/3j,.|,.,) РИ всех г, е4. ( О ё Z г Г р « ok. s 1 ), Если бы эначешгя параметров были известны, то управление ( к 0,1,,.,. ) лребо- валось бы определять в соответствии со сделанными выше преотоложе1тями по следующему правилу: -H)x -г Tf ( 0,0 0,i wit тг masif (I 4o V«Поскольку значения вектора параметров J g/I неизвестны и не могут быт «дантvIфициpoвflшл заранее, то организуется процедура н 1хождг ния оценок параметров У 1/У-, // в соответствии с рекур- рентным алгоритмом решения неравенств (l), где 1 г сС|, , к которым добавляются неравенства: V, г г Условие (4), соответствуот требова1шю (1), словие (5) соответствует требова ппо (А). Алгоритм адаптивного управления работает следующим образом. При t О задается значение ( ), удоншетворяющее условиям (4) , (5) при i О , Т Г (О), Вычисляетс5г управление о1 oL., по формуе (3), где 1 , После осуществле1П1Я такта управлешш в MOMeHTt параTF Wметры пересчитываются так, чтобы довлетворить неравенствам (4), (5) при 2. 2.J . Исходя из иайдешгых оценок J вы.числяется управлршю ot j по формуе 3, где Г t и т.д. алгоритмов решения неравенс (2),1 (4), (5) однотипны и, например, Ш1я HepaBenejTB (2) имеют вид ti.-«,i°u otj-sv.j-.; МО 5 Блок -схема систека 1 подстройки машины включает в себя -йзмеритепьньг. преобраз 1затепь 2, в качестве которого использован датчик йискрегаого действия. Регулятор состоит из входного 3, выхо ного 4 и арифметического устройства, сод жащего оперативное запоминающее устройство 5, сумматор-вычислитель 6, общее устройство 7 управпетгая, устройство 8уп лет1я вводом, пульт 9 управления, полупостомнное aanoNomaiomee устройство 1О. Работа устройства заключается в следу ющем. На вэюд устройства управления ввода на каждом шаге ( т.е. при изменении врем ни в каждом промежутке с в Т , . ) подаю1х;я три величины х (г. извлекаемые из текущего значения т- Из графика из,менения г ( i. ) видно, что арифметическое устройство вводятся неско ко иные величины, преобразуемые в ,к (г.,сСц),1-п программным путем. Имеем: .t.i...) TTiaxx(t)-2. К c-K K т.,, . т-М1 де COn5t. величина метки уро.вня Z.(t) , веяг1чпна метки времени, минимальное количество Меток времени уложтшшнхся между двумя меткам ,У|ЗОВНЯ. Равенство (6) формальным oilp делением для Л ( величины спада трае тории от максимума до конца периода), В арифметическое ycTpovlcTso вводят вет1ЧН ны (t), /-) Входное устройство 3 как раз м предназначено для получения из . ( t ) этих врличтт. Поясним работу измерительного преобразователя 2, имеющую зиачешю для конструирования входного устройства. Иаме- рительт1ый преобразователь 2 учитывает } направлет1е перемещения тем,что сигналы | прямого и обратного перемещений разделены на два канала, которые в дальнейшем | будут называться прямой канал и обратный; канал.i Входное устройство 3 состоит из следующих функциональных блоков: двоично-десятичного счетчика, предназначенного для подсчета импульсов уровня попеременно с прямого и обратного каналов, счетчиков числа меток времени между двумя икшульсами уровня прямого канала; реверсивного j счетчика, заполняемого и считываемого импульсами соответстветю обратного и прямого каналов в промежутке времениЦ,), Работает входное устройство следующим образом. Стартовый сигнал устанавливает управ- ляющие триггеры и триггеры счетчиков в ; исходное положение, подготавливая их к пропусканию импульсов с прямого канала, которые, начшгая поступать, заполняют . двоично- десятичхпзтй счетчик. Первый импульс o6paTiioro канала, означают и , что так ( -t ) достигнут, подготавливает счетчик к приему импульсов с обратного канала и вводит ти (t } в оперативно запоминающее устройство 5 арифметического устройства. Сигнал считьтвагшя очищает счетчик и записывает в него едиШЩУ) соответствующую прошедщему импуль г су с обратного канала. В счетчик затем записываются импульсы до момента t , отмечаемого генератором импульсов ГИ-, , синхро шзироващюго с сетью и подающего . импу.тьсы в момент време1ш (Ч-«-и.ТГ)/й) . мпуяьсы ГИ-1 считывают и очищают счет-, чик, засылая в оперативное запоминающее устройство Б п . Импульсы начинают посту.пать. в реверсивный счетчик, .заполняя его. . После того, как траектория передает через точку т ( t ), появля.ются импульсы на прямом канале и пост ттают по обратному каналу в рвБерсипный счетчик, считывая зщтнсашлле импульсы с обратного канала до момента перехода его .через 1гуль. В этот момент схема восстанавлявается для следу1Ощего шахв. Особое место ЕЮ входном устрой стве 3 регулятора занимает блок фиксации Величины Д 1/ , которая служит для вычнслеВвол бгшя максимума проиоводной t оперативно - запоминающее устройстсо 5 в момент даст1 кешш ос 1цостпляется поток у., что пронзводзшя - нмеьт такой характер, как показано на фиг. 1)Т,е. в течение одного шага имеется тол1-,ко однк мак-; симум тп . Схема вхошшго устройс:тпа 3; Полнгютью восстанавливаетсяПри .переходе эеверсивного счетчика через нуль. Ийкопле , гае величтол 1-ц производится программным :1утем в блоке арифметического устройства. Арифметическое устройство предназначе 0 для вычислений согласно алгоритму, опи-к санному выше. Выходной реестр арифметвчес--|г кого устройства содержит одну тетраду, в которую последовательно aarracbiBaiofH деЬятичные числа, предназначенные к выводу йа выходное устройство и считываемое им-; пульсами, соответствующими разрядам Этичного числа. Числа, предназначенные для ввода в арифметическое устройство, засыпаются с пульта 9 и записываются; в опеJjaTBBHO - запоминающее устройство SL Его; рабочее поле состоит, примерно, из четыре регистров, В выходной регистр арифметического устройства после всех вычислений засылается число, соответствующее углу . зажигания, записанное в вид€а jillOO-() Выключение программыпроисходит при вы-I полнении условия|Н| «: , «л.) Выходное устройство 4 регулятора предназначено для формирования сигнала, соответствующего расчетному значению угла зажигания c) и передаче его в устройство, поджигания. Величина угла ct. ц рассчиты- j вается в- арифметическом {устройстве и преДставлена в виде (f,.l,2,...,100), гдеМк - расчетная величина; 5t цена деления диапазона управления. В выходной регистр арифметического {устройства засылается число - - - -cL ClOO-CoL -id):. . Вьфабота1шое«Х передается в парафазном коде последовательно в тетрады и при noMdщи импульсов записи А и В, начиная с младшего разряда. Задержка на .десять тактовых импульсов в :выражений Л введе- .нана период расчетов в арифметическом устройстве. После прохождения счетчика через нуль, что фиксируется схемой совпадения, сигнал, соответствующий рассчитанной величине оС,. по дается на схему поджигания, представляющую собой импупьсньтй усилитель с трансформаторным выходом. После этого схема выходного устройства 4 полностью восстанавливается до следующего} здакта. Формула изобретения 1. Машина иль контактной точечной сварки с системой автоматической подстройки, содержащая подвтокный и неподвилшый электроды, соединенные с силовым трансформатором, подключенным к сети через вентильный прерыватель, ;измерительное ; устройство дискретного действия с растровыми решётками и формирователем сигнала, .бло1 .программ и регулятор, отл ич а ющая с я тем, что, с целью повышения качества сварки путем подстройки к неизвестным заранее параметрам, в регулятор введены входное устройство, определяющее: Велич1гау максимального к кпнечногх значе ния теплового расширения металла и максимальное значение производной для каждого: импульса сварочного тока; арифметическое устройство соединеннре с блоком программ, формирующее велшгину угла поджига1гая по принятому алгоритму управления; и выход-; ное устройство, форм1фующее сигаал для. поджигания вентиля. 2.Машина по п. 1, о т л и ч а ю щ с я тем, что, с целью выработки велиj чин максимального и конечного значений теплового расширения металла и максимального значе1шя производной теплового расширения металла в течение каждого nortyпериода сварочного тока, во входное устройство введены двоично - десятичный счетчик} счетчик числа меток времени между двумя импульсами теплового расширения ; металла, снабженный устройством -сравнения :для определехшя максимальной велич ны производной теплового расш1;фе1П1я металла; реверсивный счетчик; генератор импульсов, синхронизированный сетью; и генератор меток времени. 3. Машина поп. 1, отл ич а юща яс я тем, что, с целью выработки сигнала для поджигания вентиля прерывателя, в выходное устройство включены две тетрады для записи значения величины угла под: ;игания, выработанной арифметическим устройством ;,1генератор тактовых импульсов для считывания числа, записанного в тетрады, и устройство управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| Круговой интерполятор с оценочной функцией | 1976 |
|
SU638916A1 |
| Устройство для измерения температуры | 1990 |
|
SU1719926A1 |
| Система для передачи телеизмерительной информации | 1981 |
|
SU1056246A1 |
| Адаптивный корректор межсимвольной интерференции | 1987 |
|
SU1540009A1 |
| УСТРОЙСТВО ДЛЯ ИМИТАЦИИ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ЦЕЛЕЙ НА ЭКРАНЕ ИНДИКАТОРА | 1988 |
|
SU1841101A1 |
| Устройство для измерения частоты гармонического сигнала | 1987 |
|
SU1525607A1 |
| Устройство для магнитной записи сигналов времени | 1983 |
|
SU1111200A1 |
| Устройство для каротажа скважин | 1985 |
|
SU1332248A1 |
| Система для передачи телеизмерительной информации | 1981 |
|
SU1084852A1 |
| Устройство для измерения размеров изделий | 1988 |
|
SU1613856A1 |