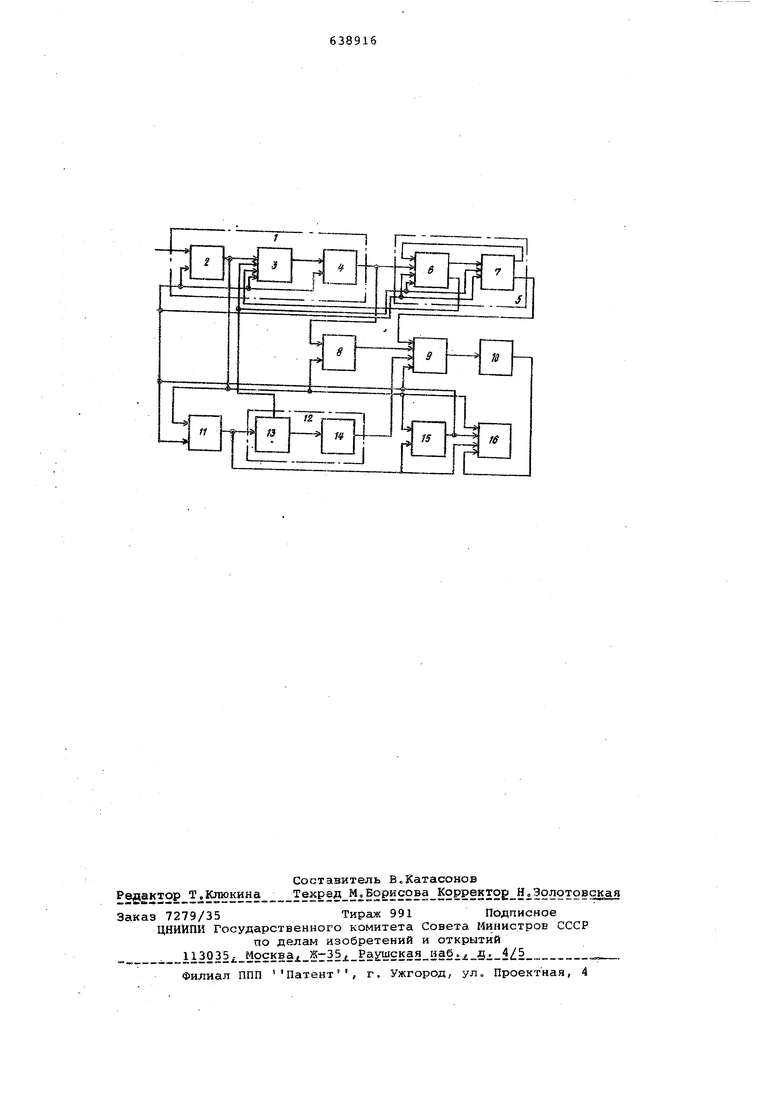
образователя кода, измерителя перегле щений и исполнительного блока„ На чертеже представлена структурн схема кругового интерполятора Круговой интерполятор содержит за поминающее устройство 1, включающий ;в себя блок 2 памяти кадра, блок 3 ввода и блок 4 памяти текущего значения координатр блок 5 алгебраического суммирования, объединяющий реверсивный счетчик б и схему 7 управления реверсивным счетчиком, а также преобразователь 8 кода. 9 с триггером 10 знака, блок 11 задани скоростк, синхронизатор 12, состоящи из; генератора 13 подтактов :« генератора 14 тактов, измеритель 15 перемещения и исполнительный блок 16,, Информация кадра заносится в параллельно-последовательном коде в блок 2 памяти кадра и распределяется на все устройства интерполятора, Данные о начальной величине первой и второй координат интерполируемого отрезка вводятся з блок 4 памяти текущего значения координат, данные о плоскости обработки и зна ках координат - в исполнительный бло 16, о длине дуг окружности (суммарное перемещение по обеим координатам) - в измеритель 15 перемещения, о скорости и величина участка торможения в блок 11 задания скорости, После записи информации в блоке 2 Памяти кадра начинается непосредст венная обработка кадра. Импульс скорости с блока 11 задания скорости запускает синхронизатор 12, который осуществляет временное разделение арифметических и логических операций по разрядам системы счисления. Количество тактов генератора 14 тактов определяется числом разрядов, входящих в ту или иную координату в выбранной системе счисления (так, дл шестизначного числа количество так ТО8 равно шести независимо от системы счисления), Количество подтактов генератора 13 подтактов зависит от необходимого разделения во време логических операций при выполнении действия над каясдым из разрядов числ В данном конкретном случае при шести разрядном десятичном числа (шесть двоично-десятнчнык тетрад) количест тактов иа каждый .импульс скорости р но шести, а количество подтактов на каждый такт - трем, Таким образом, по первому такту производятся опера над младшим разрядом, по второму та ту операции над вторы разрядом справа и т,д Первый подтакт считывает через блок 3 ввода из блока 4 памяти теку щего значения координат тетрады по каждому из тактов начиная с гчладшег разряда о Выбор первой или второй кр -диваты .осуществляется в зависимости от состояния триггера 10 знака испо нительным блоком 16. Считанная тетрада распределяется по двум каналам, записывается по этому же подтакту через лраобразователь 8 кода в сумматор 9 накапливающего типа с последовальным вводом разрядов слагаемых и в реверсивный счетчик 6. В преобразователе 8 кода осуществляется поразрядное удвоение значения текущей координаты и либо преобразование удвоенного координаты из прямого в обрат1 ый код для убывающей координаты, либо передача прямого кода непосредственно для возрастающей координаты. Эти преобразования необходимы в силу огорчто удвоенное значение убывающей координаты всегда вычитается из содержимого сумматора 9, а удвоенное значение возрастающей координаты суммируется с отрицательным числом, находящимся в cyMiviaTope 9. Так,для убывающей координаты число,взятое из блока 4 памяти текущего значения координат, начиная с младшего разряда умножается на два,возникший при этом перенос запоминается и передается последующему разряду, а полученный младший разряд путем инвертирования содержимого двоично-десятичной тетрады преобразуется в обратный код. И так последовательно по всем разрядам. Полученный код подается для суммирования предыдущего значения оценочной функции сумматором 9, куда также из схемы 7 управления реверсивным счетчиком подается положительная единица на его младший разряд, необходимая для выполнения алгоритма (положительная единИ да суммируется с удвоенным значением текущей координаты, взятым со знаком плюс для возрастающей координаты и со знаком минус для убывающей координаты) . Аналогичные операции осуществляются в том случае, если координата возрастающая. При этом к значению оценочной функции с сумматора 9, которое берется в обратном коде, добавляется удвоенное текущее положительное значение возрастающей координаты. Операции cylvlмиpoвaния или вьмитания удвоенного значения текущей координаты и единицы с содержимым сумматора 9 осуществляются с каждым приходом импульса скорости с блока 11 задания скорости. Распределение импульсов скорости по каналам осуществляется следующим образом. Если знак оценочной функции отрицательный, что регистрируется триггером 10 знака, то берется возрастающая координата и шаг делается по этой координате, если знак положительный, то берется убывающая координата, а шаг делается по этой координате . Для преобразования начального значения координат, записанного в блок 4 памяти текущего значения координат, в текущие координаты служит блок 5 алгебраического суммирования, с кажд шагом по убывающей координате ее начальное значение необходимо уменьшат на единицу, а при шаге по возрастающей координате увеличивать на единиц Считанная в реверсивный счетчик 6 первым подтактом из блока 4 памяти текущего значения координаты двоично десятичная тетрада младшего разряда увеличивается (уменьшается) на одну единицу по второму подтакту. Единица поступает в реверсивный счетчик 6 со схемы 7 управления реверсивным счетчиком. Если при сложении (вычита нии) единицы с младшим разрядом возникает перенос, то он запоминается к подается для сложения со следующим разрядом во время второго подтакта соответствующего такта и т.д. Резуль тат сложения в реверсивном счетчике 6 по третьему подтакту записывается в блок 4 памяти текущего значения ко ординат на то место, откуда была взята тетрада. Таким образом, в каждом такте по первому подтакту осуществляется последовательная выборка двоично-десятичной тетрады из блока 4 памяти текущего значения координат по второму - установка в ноль бывшей тетрады, и по третьему подтакту-- за пись нового значения текущей координаты в него из блока 5 алгебраического суммирования. Установка реверсивного счетчика 6 в режим сложения или вычитания в зависимости от знака координаты осуществляется схемой 7 управления реверсивным счетчиком. Управление скоростью и ускорением в интерполяторе осуществляется блоком 11 задания скоросхи, с выхода которого импульсы скорости поступают на запуск синхронизатора 12, измеритель 15 перемещения и исполнительный блок 16. Первоначальный запуск синхронизатора 12 осуществляется импульсом скорости, затем на каждые три импульса подтактов следует один тактовый импульс. Синхрочастота в блоке задания скорости выбрана такой, чтобы синхронизатор 12 оканчивал работу меж,ду импульсами скорости при их максимальной частоте. В описываемом круговом интерполяторе упрощено устройство за счет введения блока-алгебраического суммирования, построенного на основе реверсивного счетчика, емкость которого определяется основанием системы счисления, и схемы управления к нему. К тому же, применение для хранения информации текущего значения координат матричной полупроводниковой памяти в значительной мере повышает надежность и уменьшает стоимость и габариты всего устройства. Формула изобретения Круговой интерполятор с оценочной функцией, содержащий запоминающее устройство, подключенное к преобразователю кода, измерителю перемещений и исполнительному блоку, и через последовательно соединенные блок задания скоЬости, блок синхронизации, сумматор rf триггер знака к исполнительному блоку, входы которого подключены непосредственно и через измеритель перемещения к блоку Зс1дания скорости, выход измерителя перемещения соединен со входами сумматора, блока ввода данных и блока задания скорости, о т л ичающийс я тем, что, с целью упрощения интерполятора и расширения области применения, в него введен блок алгебраического суммирования, входы которого подключены к выходам запоминающего устройства, блока синхронизации и измерителя перемещений, а выходы - ко входам запоминающего устройства и сумматора, входы запоминающего устройства подключены к выходам блока ввода программы, блока синхронизации и измерителя перемещений, а выход - ко входам преобразователя кода, измерителя перемещений и исполнительного блока. Источники информации, принятые во внимание при экспертизе: 1.Авторское свидетельство СССР № 249785, кл. Q 05 В 19/20, 1960. 2.Авторское свидетельство СССР И 401964, кл. Q 05 В 19/20, 1971.

| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровой интерполятор | 1981 |
|
SU1003022A1 |
| Устройство для программного управления | 1986 |
|
SU1376065A1 |
| Устройство программного управления | 1984 |
|
SU1246055A1 |
| Устройство для регулирования расхода жидкости | 1981 |
|
SU999025A1 |
| Устройство для дискретного преобразования Фурье | 1984 |
|
SU1188751A1 |
| Многокоординатный цифровой линейный интерполятор | 1987 |
|
SU1522154A1 |
| УСТРОЙСТВО ДЛЯ ИМИТАЦИИ РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ МЕСТНОСТИ | 1988 |
|
SU1841035A1 |
| Устройство для отображенияиНфОРМАции | 1976 |
|
SU798961A1 |
| Линейно-круговой интерполятор | 1985 |
|
SU1259218A1 |
| Интерполятор с самоконтролем | 1985 |
|
SU1280576A1 |