канала, кроме последнего, выходы реверсивного счетчика каждого информационного канала, кроме последнего, соединены соответственно с вторыми, входами блока управления последнего информационного канала, третий вход которого является управляющим входом системы, пусковая клемма которой соединена с пятыми входами блока управления каждого информационного канала, кроме последнего, и с четвертыми входами блока управления последнего информационного канала, выходы блока памяти соединены с соответствующими входами блока согласования, выход которого является выходом системы, отличающаяся тем, что, с целью повышения точности измерения информации, в последний информационный канал системы введены третий пре,образователь 1астоты, блок элементов задержки, компаратор, блок задания апертуры, реверсивный счетчик, второй блок согласования, формирователь импульсов, блок считывания, блок записи, блок усиления и блок отсчета, выход которого соединен с первым входом второго блока согласования, к второму входу которого подключен первый выход третьего преобразователя частоты,второй, третий и четвертый выходы блока управления соединены соответственно с первым, вторым и третьим входами третьего преобразователя частоты, второй выход которого соединен с первьал входом компаратора, выход которого подключен к -пятоглу входу блока управления и первому входу -блока эле-, ментов задержки, выход которого соединен с шестым входом блока управле ния, пятый и шестой выходы которого подключены соответственно к входам блока Отсчета и блока задания апертуры, выход которого соединен с вторым входом компаратора, седьмой и восьмой выходы блока управления соединены соответственно с третьим входом второго блокасогласования и первым входом реверсивного .счетчика, выход которого подключен к четвертому входу второго блока согласования, выход блока считывания подключен к входу формирователя импульсов, первый и второй выходы которого соединены соответственно с вторым входом реверсивного счетчика и седьмым входом блока управления, девятый выход которого подключен через блок усиления к блоку записи, третий выход формирователя импульсов соединен с третьим входом реверсивного счетчика и восьмьм вхо;{ом блока управления, третий выход второго преобразователя частоты соединен с четвертым входом третьего преобразователя частоты, выход второго блока согласования последнего информационного канала подключен к четвертому входу блока памяти, второй выход блока элементов задержки подключен к второму входу блока элементов задержки последнего информационного канала.
2. Система по п.1, отличают а я с я тем, что. блок управления последнего информационного канала содержит три триггера, пять элементов ИЛИ, три элемента задержки и четыре формирователя импульсов,выход первого элемента ИЛИ подключен к первым входам первого и второго, триггеров и к входу первого формирователя импульсов, выход которого является вторым выходом блока управления, первый вход которого соединен с перйым входом второго элемента ИЛИ, вторым входом второго триггера и первого элемента задержки, выхол| которого подключен к второму входу первого триггера, выход которого coq динен с четвертым выводом блока управления и с входом второго формиро-« вателя импульсов, выход которого является первым выходом блока управления, пятый вход которого соединен с вторым входом второго элемента ИЛИ и первым входом третьего триггера, выход которого соединен с входом третьего формирователя импульсов,выход которого подключен к пятому выходу блока управления, второму входу третьего триггера и к входу второго элемента задержки, выход которого соединен через третий элемент задержки с первым входом третьего.элемента ИЛИ, второй вход которого является седьмым входом блока управления, т)етий вход которого через четвертый формирователь импульсов соединен С первым входом пятого элемента ИЛИ, второй вход KOTOpoj o является восьмым входом блока управления шестой вход которого является первым входом четвертого элемента ИЛИ, к второму входу которого подключен выход второго элемента задержки, выходы второго элемента ИЛИ, второго триггера, четвертого, третьего и пятого элементов ИЛИ являются соответственно третьим, шестым, седьмым, восьмым и девятым выходами блока управления, четвертый и вторые входы которого являются соответственно входами первого элемента ИЛИ. Изобретение относится к информационно-измерительной технике и может быть использовано, для сбора и передачи телеизмерительной информации. Предпочтительно изобретение предназначено для построения вертикальной структуры изменения гидрофи зических параметров с помощью автономных зондирующих комплексов. Известна система для сбора и передачи телеизмерительной информации о гидрофизических параметрах, содер жащая запомингдащее устройство, про граммно-временное устройство, блок управления в составе генератора опорной частоты, делителя частоты и канального распределения, а также узел связи и многоканальную систему оцифровки, каждый канал которой содержит первичный измерительный преобразователь,преобразователь ансшог-частота, частотное множитель но-делительное устройство, формирователь импульсов, ключ, преобразователь средней частоты в код, включающий двоичный счетчик, запоминающий регистр со схемами ввода и выв да кода l .. Однако эта система обладает дина мической погрешностью осреднения за временной интервал преобразования и погрешностью ступенчатой аппроксимации, в результате которой сох; роняется предыдущее значение преобразованного сигнала на время текущего преобразования. Кроме того, из-за равномерной дискретизации преобразования в ОЗУ записывается ; большое число избыточных данных,что снижает информативность системы. Наиболее близким к изобретению явJJяeтcя система для передачи телеиз fepйтeльнoй информации, содержащая оперативное запоминающее устрой ство, соединенное с узлом связи, блок сдвига совпадающих сигналов и информгщионные каналы, каящый из которых блок управления, блок переноса кода, преобразователь средней частоты в код, последовавj тельно соединенные первичный измери тёлыёлй преобразователь, преобразователь в частоту следования импуль сов и частотное множительно-делител ное. устройство, выход которого под1ключен к первому вхоау преобразователя средней частоты в код, первы выход которого подключен к первому входу блока управления, второй его выхо) подключен к первому входу пер вого блока переноса кода, первый выход блока управления во всех информационных кангшах, кроме последнего, привязочного, подключен к вто рому входу первого блока переноса кода, во всех информационных каналах второй выход блока управления соединен с вторым входом преобразователя средней частоты в код, второй вход которого соединен с пусковой к 1еммой системы, выход- первого блока переноса кода подключен соответственно к первому, второму и третьему входам оперативного запоминающего устройства, все информационные каналы, кроме последнего, содержат преобразователь приращения средней частоты в код, цифровой компаратор, блок цифрового задания апертуры, счетный блок и второй блок переноса кода, причем второй, третий и четвертый выходы блока управления в них подключены соответственно к первому, второму и третьему входам преобразователя приращения средней частоты в код, пятый, шестой и седьмой выходы блока управления . подключены соответственно к первьт входам счетного блока, второго блока переноса кода и блока задания апертуры, выход которого подключен к первому входу цифрового компаратора, третий выход преобразователя средней частоты в код соединен с четвертым входом преобразователя приращения средней частоты в код, первый выход которого подключен к второму входу цифрового компаратора, выходы всех счетных блоков подключены к третьему входу блока управления своего информгщионного канала и к третьему и четвертог-су входам : блока управления последнего информационного канала, выход цифрового . компаратора каждого информгщионного канала, кроме последнего, соединен с четвертым входом блока управления, вторым входом счетного блока и сот ответственно с первым и вторым входом блока сдвига совпещающих сигналов, первый, второй и третий выхбды блока сдвига совпадающих сигналов соёдинешл с пятыми входами блоков управления всех информационных каналов, выходы вторых блоков переноса кода всех информгщионных каналов, кроме последнего, подключены соответственно к четвертому и пятому входу оперативного запоминающего устройства, второй и третий выходы преобразователя приращения средней частоты в код подключены к второму, и третьему входctM второго блока переноса кода; преобразователь средней частоты в код в последнем информационном канале содержит реверсивный счетчик регистр сдвига, генератор опорной частоты и блок сдвига совпадающих импульсов, при этом первый .вход преобразователя средней частоты в код соединен с первыми входами регистра сдвига и блока сдви1 а .совпадакяцих импульсов, второй вход преобразователя средней частоты в код соединен с вторым входом регист ра сдвига и первым входом реверсивного счетчика, выход генератора опо ной частоты подключен к третьему входу регистра сдвига и второму вхо ду блока сдвига совпадающих импульсов, выход регистра сдвига подключе к первому выходу преобразователя средней частоты в код и третьему входу блока сдвига совпадающих импульсов, первый и второй выходы которого соединены с третьим выходом преобразователя средней частоты в код, второй выход которого соединен с выходами разрядов реверсивного счетчика 2 . Известная система, также как и все современные зондирующие гидроло гические системы, предназначенные, для измерения вертикальной, структуры гидрологических параметров с при вязкой измеряемых параметров к глубине, использует в качестве измерителей глубины датчики давления. Однако измерение глубины с помощый датчиков давления производится с :существенными методическими погрешностями, связанными с изменением столба жидкости над датчиком при волнении поверхности океана, соизмеримыми с высотой волны и действующими на участке от поверхности до глу бины, равной половине длины волны, т.е. в наиболее информативном слое формирования явления термоклин а, практически не позволяет использо- ; вать этот принцип для измерения -гон кой вертикальной структуры гидрологИческих полей при наличии волнений Поэтому такие системы имейт ограничанное применение при отсутствии во нения и на участках.глубин, больших половины максимально возможной длины волны. Целью изобретения является повышение точности, измерения информации о вертикальной структуре гидрофизических параметров путем уменьшения погрешности измерения привязочного параметра глубины. Поставленная цель достигаемся тем, что в системе для передачи телеизмерительной информации, содержащей в каждом информационном ка нале, кроме последнего, блок управления, первый выход которого подклю чен к первому входу первого блока согласования; второй выход - к первому входупервого и второго преобразователей частоты, третий и четвертый выходы - к второму и третье,му эходам второго преобразователя частоты, пятый выход блока управле-. нйЯ соединен с первым входом реверсивного счетчика, шестой и седьмой выходы .блока управления подключены соответственно к входу блока задаНИН апертуры и к первому входу второго блока согласования, первичный преобразователь, выход которого через последовательно .соединенные третий преобразователь частоты и арифметический блок соединен с вторым входом первого преобразователя частоты, первый виход которого соединен с четвертым входом второго преобразователя частоты, первый и . второй выходы которого подключены соответственно к второму и третьему входам второго блока согласования, третий -выход BTotioro преобразователя частоты подключен к первому входу компаратора, к второму входу которого подключен выход блока задания апертуры, второй выход , первого преобразователя частоты соединен с первым входом блока управления, третий выход первого преобразователя частоты соединен .с вторым входом первого блока согласования, выход компаратора соединен с вторыми входами реверсивного счетчика и блока управления, к третьег у входу которого подключен выход реверсивного счетчика, последний информационный канал содержит блок управления, первый выход которого соединен с первым входом первого блока согласо-аания, первичный преобразователь, выход которого через последовательно соединенные первый ггреобразователь частоты и арифметический блок сое диНен с первым входом второго пре- . образователя частоты, первый и второй выходы- которого подключены соответственно к второму входу первого блока согласования и первому входу блока управления, второй выход которого соединен с вторым входом второго преобразователя частоты, выходы первого и второго блоков согласования каждого информационного канала кроме последнего, подключены соответственно к первому и второму входам блока памяти, к третьему входу которого подключен выход блока согласования последнего информационного канала, выход компаратора каждого информационного канала, кроме последнего, соединен с входами блока элементов задержки, первые выходы которого подключены к четвертому входу блока управления каждого информационного канала, кроме последнего, выходы реверсивного счетчика каждого информационного канала, кроме последнего/ соединены соответственно с вторыш входами блока управления последнего информационного канала, третий вход которого является управляющим входом системы, пусковая клемма которой соединена с пятыми входами блока управления каждого информационного канала, кроме последнего.
г и с четвертыми входами блока управления последнего информационного канала, выходы блока паьмти соединены с соответствующими входами блока согласования, выход которого является выходом cиcтe лы, в последний информационный юанал ристемы введены третий преобразователь частоты, блок элементов задержки, компаратор, блок .задания апертуры, реверсивный счетч чик, второй блок согласования, формирователь импульсов, блок считывания, блок записи, блок усиления и блок отсчета, выход которого соединен с первым входом второго блока согласования, к втором входу которого подключен первый выход третьего преобразователя частоты, второй, третий и четвертый выхо.цы блока управления соединены соо.тветственно с первым, втррым и тре.тьим входами третьего преобразователя частоты, второй выход которого соединен с первым входом компаратора, выход которого подключен -к пячом г входу блока управления и первому входу блока элементов задержки, выход которого соединен .с шестым входом блока управления, пятый и шестой выходы которого подключены соответственно к входам блока отсчета и блока задания апертуры, выход которого соединен с вторым входном компаратора., седьмой и восьмой выходы блока управления соединены соответстпэнно с третьим входом второго блока согласования и первым входом реверсивного счетчика, выход которого подключен к четвертому входу второго блока согласованИЯ, выход блока считывания подключен к входу формирователя импульсов, первый и второй выходы которого соединены соответственно с вторым входом реверсивного счетчика и седьмым входом блока управления, девятый выход которого подключен через блок усиления к блоку записи, третий выход .формирователя импульсов соединен с третьим входом реверсивного счетчика и восьмым входом блока управления, третий выход второго преобразователя частоты соединен с четвертым.входом третьего преобразователя частоты, выход второго блока согласования последнего информационного канала подключен к четверТОЛ5У входу блока памяти, второй выход блока элементов задержки подключен к второму входу блока элементо.в задержки последнего информационного канала.
Кроме того, блок управления последнего информационного канала содержит три триггера, пять элементов ИЛИ, три элемента задержки и четыре формирователя импульсов, выход первого элемента ИЛИ подключен к первым входам первого и второго триггеров и к входу первого формирователя импульсов, выход которого является вторым выходом блока управления, первый вход которого соединен с пер5 вым входом второго элемента ИЛИ, . вторьп-4 входом второго триггера и входом первого элемента задержки, выход которого подключен к BTopobty входу первого триггера, выход которого
0 соединен с четвертым выходом блока управления и с входом второго формирователя импульсов, выход которого является первым выходом блока управг-. ления, пятый вход которого соединен
5 с вторым входом второго элемента ИЛИ и nepBHivi входом-третьего триггера, выход которого соединен с входом третьего формирователя импульсов,выход которого подключен к пятому выQ ходу блока управления, второму входу третьего триггера и к входу второго элемента задержки, выход которого соединен через третий элемент задержки с первым входом третьего
5 элемента ИЛИ, второй вход которого является входом блока управления, третий вход которого через четвертый форм.ирователь импульсов соединен с первым входом пятого
Q элемента ИЛИ, второй вход которого является восьмым входом блока управления , .шестой вход которого является первым входом четвертого элемента ИЛИ, к BTOpO iy входу которого подключен выход второго элемента задер5жки, выходы второго элемента ИЛИ, второго триггера г четвертого, тре-тьего и пятого элементов ИЛИ являются соответственно третьим, шестым, , восьмым и девятым выхода
0 ми блока управления, четвертый и
вторые входы которого являются соответственно входами первого элемента ИЛИ,
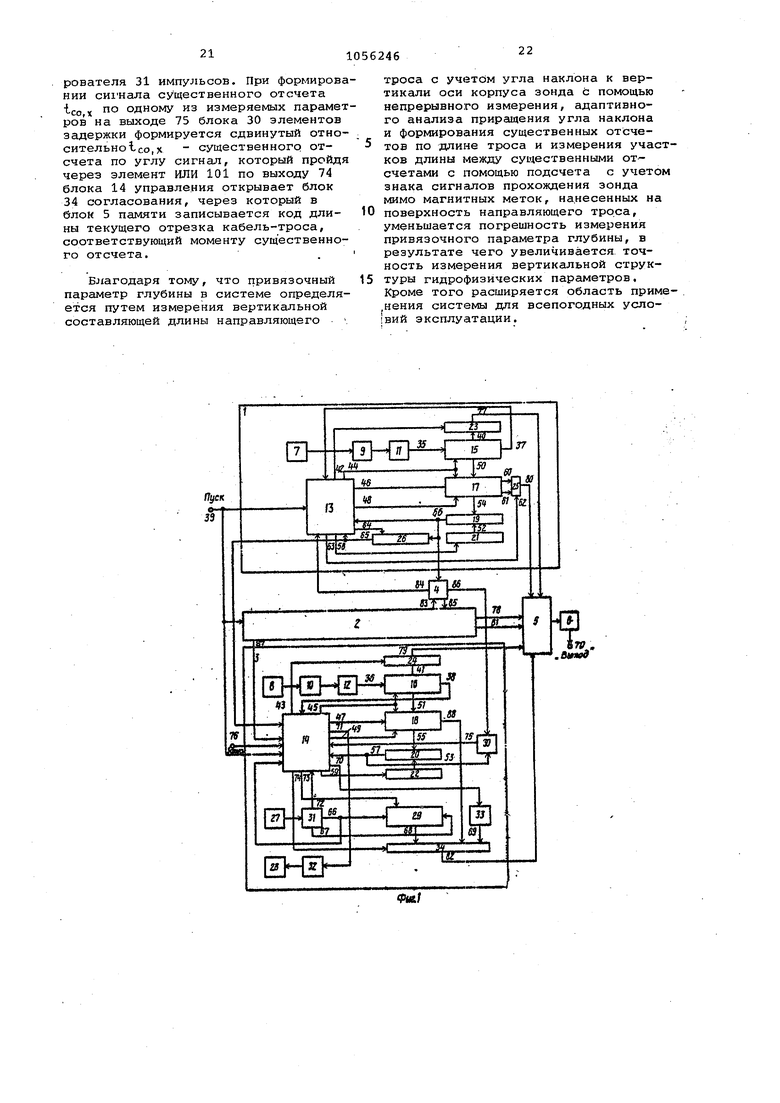
с Ла фиг,1 изображена блок-схема канала; на фиг,2 - блок-схема блока управления последнего информацион ного канала. ,
. Система для передачи телеизмери тельной информации содержит информа {ционные каналы 1-3, блок 4 элементов за.держки, блок 5 памяти, блок б согласования. Каждый из информа- ционных каналов 1-3 с;одерх ит пер вичный. преобразователь 7(8). преоб разователь 9 (10 ) частоты, арифметический блок 11(12), блок 13(14) управления, преобразователи. 15(16) и 17(18) частоты, KONmapaTop 19(20), блок 21(22) задания апертуры, блок
0 23(24) согласования. Кроме того, все информационные каналы 1(2), кроме последнего привязочко-го канала Э глубины, содержат второй блок 25 согласоваЕ1ия и реверсивный счетчик 26, а
5 привязочный канал 3 дополнительно
содержит блок 27 считывания, блок 28 записи, реверсивный счетчик 29, блок
30элементов задержки, формирователь
31и мпульсов, блок 32 усиления, блок 33- отсчета и второй блок 34 согласования. В каждом информационном канале 1-2 выход первичного преобразователя 7 через третий преобразователь
9 частоты, а в третьем канале - первичный преобразователь 8 через первый преобразователь частоты 10 подключей к входу арифметического блока 11(12). Выход 35 арифметического блока 11 подключен к второму первого преобразователя 15 частоты. Выход 36 арифметического блока 12 подключен к первому входу второго преобразователя 1 частоты. Выход 37(38) преобразователя 15(16) частоты подключен к первог/iy входу блока 13(14) управления. Входная клемма 39 Пуск системы подключена к пя, тому входу блока 13.управления и к четвертому входу блока 14 управления Выход 40 первого преобразователя 15 частоты подключен к информационному входу первого блока 23 согласования. Выход 41 второго преобразователя 16 частоты подключен к информационному входу первого блока 24 согласования. Управляющий вход блока 23(24) согласовани-я подключен к выходу 42(43) блока 13(14) управлений. Выход 44 блрка 13 управления подключен к первым входам преобразователей 15 и 17частоты. Выход 45 блока 14. управления подключен К второглу входу преобразователя 16 частоты и к первому входу преобразователя 18 частоты. Выход 46(47) блока 13(14) управления
;подключен к второму входу преобразователя 17(18) частоты. Выход 48(49) блока 13 (141 управления подключен к третьему входу преобразователя 17 (18) частоты/ вход 50 (51 КОТОРОГО подключен к первому выходу первого преобразова теля 15 частоты и к: второму выходу второго преобразователя 16 Частоты. Выход 52(53) блока 21(22) задания апертуры подключен к второму входу компаратора 19(20), первый вход которого подключен к выходу 54(55) . преобразователя 17(18) частоты. Выход 56(57) компаратора 19(20) под-... ключен к второму (пятому) входу блока 13(14) управления, выход 58(59) которого подключен к входу блока
,21(22) задания апертуры. Во всех информаидаонных каналах 1(2), кроме привязочного канала 3, выходы 60 и 61 преобразователя 17 частоты подключены к информационным входам бло.ка 25 согласования, управлявдйй вход 62 которого подключен к выходу 63 блока- 13 управления, выход 64 которого подключен i к входу обнуле- .
ния реверсивного счетчика 26, счетны вход которого соединен с выходом 56 компаратора 19, а выход 65 подключен к третьему входу блока 13 управления В привязочном канале 3 выход блока 27 считывания подключен к входу формирователя 31 импульсов, выходы 66 и 67 которого подключены соответственно к восьмому входу блока 14 управления, к счетному и знаковому входам реверсивного счетчика 29i выходы 68 разрядов которого подключены к четвертым входам блока 34 согласования, первые входы которого подключены к выходам 69 блока 33 отсчета, соединенного входом с выходом 70 блока 14 управления, выход 71 которого через блок 32 усиления подключен к входу блока 28 записи. Выход 72 формирователя 31 импульсов подключен к сёдьмому входу блока 14 управления, выходы 73 и 74 которого подключены соответственно к входу сброса реверсивного счетчика 29 и к управляющему входу второго блока 34 согласования. Выход 57 компаратора 20 подключен к первоrviy входу блока, 30 элементов задержки выход 75 которого подключен к шестом входу блока 14 управления, третий вход которого соединен с входной клемой 76 Запись системы.. Выходы 77-7 первых блоков 23(24) согласования всех информационных каналов 1-3 подключены к перво1«$у и третьему входам блока 5 памяти, выход которого чере блок 6 согласования подключен к выходной клемме 79 системы. Выходы 8082 вторых блоков 25(34) согласования всех информационных каналов 1-3 подключены к второму и четвертому входа блока 5 памяти. Выходы 56(83) компараторов 19 всех информационных каналов 1(2), кроме Привязочного канала 3, подключены к первому и второму входам блока 4 элементов задержки, выходы 84(85) которого подключены к чет)вертым входам блоков 13 управления, а выход 86 подключен к второму входу блока 30 элементов задержки. Выходы 65(87) реверсивных счетчиков 26 каналов .1(2) подключены к вторым входам блока 14 управления-привязочного канала 3. Второй вход второго блока 34 согласования подключен к эна; ковому выходу 88 третьего преобргэователя 18 частоты в привязочном канале 3,
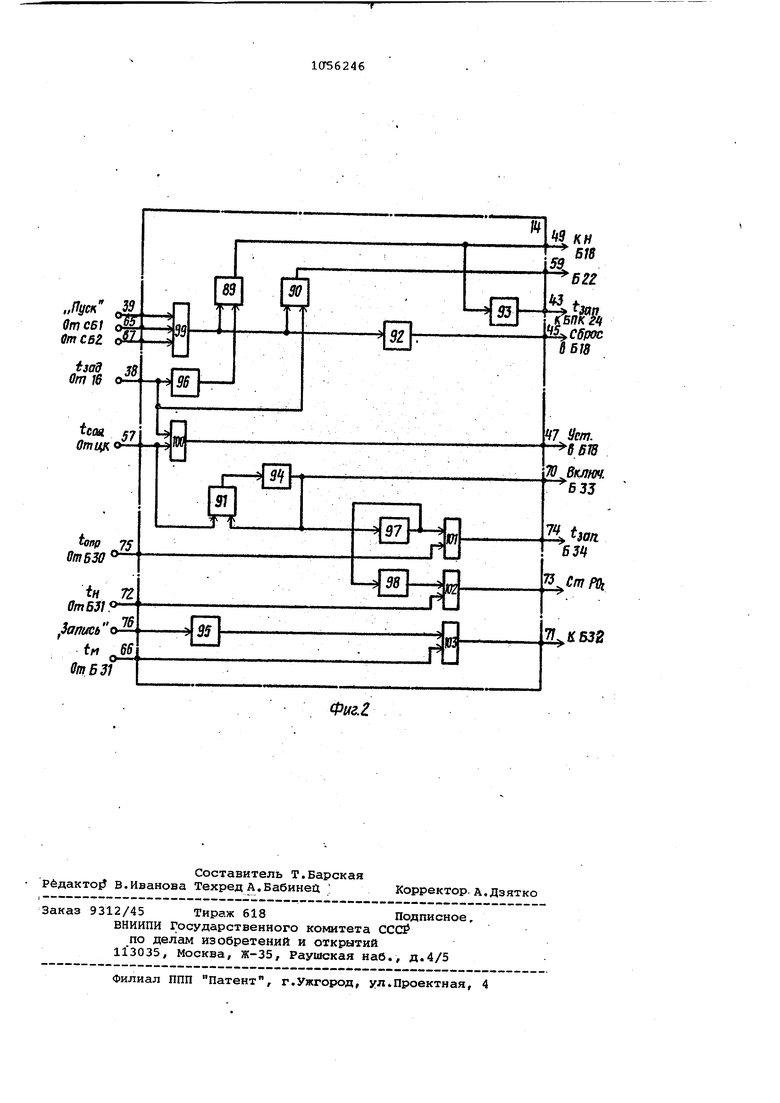
Блок 14 управления выполнен, IMTпример, из трех триггеров 89-91, четырех формирователей 92-95 импульсов, трех элементов 96-98 задержки и пяти элементов ИЛИ 99-103. Входы 39, 65 и 87 блока 14 управления подключены к входам первого элемента ИЛИ 99, выход которого подключен к первым входам первого 89 и второго 90 триггеров и через первый формирователь 92 импульсов - к выходу 45 блока, вход 38 которого подключе к второму входу второго триггера 90 к первому входу второго элемента ..ИЛИ 100. и через первый элемент задержки 96 - к второму входу первого триггера 89, соответствующий выход которого подключен к выходу 49 блока и через второй формирователь 93 импульсов к выходу 43 блока, выход 59 которого подключен к прямому выходу второго триггера 90. Вход 57 блока подключен к первому входу третьего триггера 9i и к второму входу второго элемента ИЛИ 100, выход которого подключен к выходу 47 блока Соответствующий выход третьего, триггера 91 через третий формирователь 94 импульсов подключен к выходу 70 .блока, к второму входу третьего триггера 91, и через второй элемент 97 задержка: - к первому входу четвертого элемента ИЛИ 101, второй вход которого подключен к входу 75 блока, выход 74 которого подключен к выходуЧетвертого элемента ИЛИ 101. Вход 76 блока подклю чен через четвертый формирователь 95 импульсов к первому входу пятого элемента ИЛИ 103, второй вход которого подключен к входу 66 блока,. выход 71 которого подключен к выход пятого элемента ИЛИ 103. Вход блока 72 подключен к второму входу третье го элемента ИЛИ 102, первый вход ко торого подключен через третий элемент 98 задержки к выходу второго элемента 97 задержки, а выход - к выходу 73 блока 14. СистемаРаботает следующим образом. - Аппаратура системы, в зависимост от применяемой системы спуска и под ема зондирующего комплекса, может располагаться или в зонде, или, в основном, на борту плавучести, с которой производится зондирование. Если используется система спуска и подъема со свободным движением зонда по направляющему кабель-тросу, то аппаратура размещается в корпусе зонда (этот вариант представлен на фиг.1), а в бортовой аппаратуре раз мещается блок согласования, блок па мяти, программно-временное устройст во и блок передачи данньрс (не показаны) . Если используется система принудительного движения зонда с .постоянной электрической связью между аппаратурой зонда и бортовой аппа1 атурой, то в корпусе зонда раз вмещаются только первичные измерительные преобразователи 7 и 8, преобразователи 9 и 10 частоты, подклю чаемые через блок 6 согласования с остальной аппаратурой, размещенной на борту плавучести. Принцип и сред ства сбора информации для обоих вариантов аналогичны. Ux(t) с выходов первичных , преобразователей 7 (8) , пропорционгшьные измеряемым параметрам, после . преобразования в преобразователях . 9 (ю) частоты в частоту следования иг шульсов FX (t) и масштабирования в арифметических блоках 11 (12 с выходов 35 (36) в виде частоты f {il следования импульсов, поступают на входы преобразователей 15(16) чiacтoты, выполняющих роль следящих осреднителей с непрерывным отсчетом цифрового эквивалента измеряемого параметра. Преобразователь 15(16) частоты может быть выполнен, например, в виде регистра сдвига, реверсивного счетчика, генератора опорной частоты и блока сдвига совпадающих импульсов (не показаны). Регистр сдвига выполняет роль цифровой линии задержки. Входная импульсная последовательность ijj(t) поступает на информационный вход регистра и сдвигается в нем импульсами опорной частоты, поступающими с выхода генератора на сдвигаю-щий вход регистра. На выходе регистра появляется .задержанная послед овательность импульсов i(t-Т) , cдвинy тая по фазе относительно входной последовательности на времяТ Npca-to где N peg - емкость регистра сдвига, to - период следования сдвигающих импульсов). Входная fx(t) и задержанная ijj (t-T) последовательности импульсов поступают на разнозначные счетные входы реверсивного счетчика, в котором суммируется разность им- . пульсов этих последовательностей. После пуска системы регистр сдвига обнулен, поэтому первый задержанный импульс появится через время Т. В течение времени Т в реверсивном счетчике суммируются импульсы входной последовательностиix{t) , поступающие на вход Сг1ожение. в мо- . мент появления первого задержанного игшульса на выходах разрядов р.еверсивного счетчика образуется код на.чального значения измеряемого параметра ,«.x ixWc3t i,WT, где ftr() среднее значение ча&тоты входного сигнала за время Т. После окончания интервала времени Т по первому импульсу задержанной последрйательности, поступаняцему с выхода 37 (38) на первый вход блока 13(14) управления, в последнем фррмируются сигналы управления, переводящие блоки канала в режим анализа приращения входного сигнала. Анализ осуществляется с помощью преобразователя 17 (18) частоты, компаратора 19(20) и блока 21(22) задания апертуры. Преобразователь 17(18) частоты может быть выполнен например, в виде реверсивного счетчика, блока переключения, триггера знака, блока совпадения нулей элементов И и блока номера канала (не показано). Сигналом на выходе 46 (47) блока 13 (14) управления реверсивный счетчик устанавливается в начальное положение, сигналом ,на выходе 44 (45) триггер знака и блок номера канала устанавливаются в рабочее положение и сигналом на выходе 48 (49) открываются элементы И, через которые с выхода 50 преобразователя 15 (1б) частоты начинают по ступать импульсы входной i (t) р задержанной f (i-) последовательностей на счетные входы реверсийного счетчика. На выходах 54(55) разрядов которого образуется прямой & N)( код приращения входного сигнала относительно момента установки поеобоазователя 17(18) частоты в на чальное положение. Для обеспечения всегда ПРЯМОГО кода независимо от знака приращения сигнала используется блок совпадения нулей, блок переключ:ений и триггер знака. При изменении знака приращения сигнала код в реверсивном счетчлкб начинает уменьшаться, и при достижении нуля срабатывает блок совпадения нулей, сигналом с выхода которого меняется положение триггера знака, управляюще го режимом работы блока переключения который меняет направление выходных последовательностей таким образом, чтобы последовательность импульсов большей частоты всегда поступала на .вход Сложение реверсивного счетчика. Непрерывно меняющийся прямой код с выходов 54(55) преобразователя 17(18) частоты, пропорциональный при раадению входного сигнала, сравнивает ся на компараторе 19(20) с к.одомНа.у з.аданной апертуры, поступающим с выт хода блока 21(22) задания апертуры. При достижении кодом текущего приращения входного сигнала кода заданной апертуры дМу - Мод срабатывает колшаратор 19(20) и на его выходе 56(57) формируется сигнал tca.x существенно го отсчета, определяющего момент обращения к привязочному каналу и нача .ла нового цикла анализа приращения входного сигнала относительно предыдущего существенного отсчета. Благодаря тому, что выбранные апертуры .(интервалы квантования измеряемого параметра-) постоянны, то время дости жения сигнаЗюм очередного приращения будет обратно пропорционально скорости изменения анализируемого сиг- нала, т.е. частота квантования анализируемой функции будет пропорциональна скорости его изменения. Это обеспечивает адаптивное сжатие собираемой информации. В блоке 5 памяти собирается информация, необходимая для восстановления вертикальной ., структуры измеряемых гидрофизических параметров. Сбор информации в блоке 5 памяти производится следующим образом. В момент пуска системы Пуск, поступающему на клемму 39 от программно-временного устройства (не показано) в блоках 13(14) управления всех информационных каналов 1-3 формируются сигналы, устанавлирающие режим формирования начальноГО кода измеряемых параметров. В преобразователях/ 15 (16) частоты начинает формироваться начальный код N ц.х измеряемых параметров. Через интервал времени Т по сигналу с выходов 31 (38) преобразователей 15 (16) частоты в блоках 13 (14) управления формируются сигналы, которыми по выходам 42(43/. открываются блоки 23 (24) согласования, через которые по выходам 77-79 в блок 5 памяти пере--, носятся начальные коды , i ,2 н.э измеряемых параметров. Затем информационные каналы 1-3 перехо дят в режим анализа приращения входных сигналов, формируя на выходах компараторов 19 (-20) сигналш ico.x существенных отсчетов. По сигналу на выходе 56 (57) компаратора 19,(20) с выхода 48 cH-niviaeToa сигнал, открывающий информационные входы в преобразователе 17(18) частоты.Сигналы tco,x существенных отсчетов поступают также на входы блока 4 элементов задержки, обеспечивающего сдвиг сигналов в случае их совпадения .во времени или когда сигналы разделены временным интервалом, недостаточным для четкой записи данных в блок 5 памяти. На каждый входной сигнал в блоке 4 формируются два сигнала, один из которых по выходу 84(85) поступает в блок 13 управления соответствующего канала 1(2) , а второй - по выходу 86 Поступает в привязочный 3. По сигналу на выходе 84 (85) и блоке 13 управления формируются сигналы, по которым начинается новый цикл анализа прираения сигнала. Сигналом с выхода 63 блока 13 управления открывается блок 25 согласования, через который в блок 5 памяти по выходу 80 записывается служебнаяинформация: код N H.k номера канала, в котором произошел существенный отсчет, и , знака приращения. Затем сигналагли на выходах 44, 46 и 48 преобразователь 7 частоты устанавливается в начальное положение и начинается новый цикл анализа приращения входного сигнала. По сигналу на выходе 86 блока 4 элементов задержки в привязочном канале 3 формируются сигналы управления, по которым с выхода 82 в блок 5 памяти заносится код текущего параметра, по котороглу определяется привязочный параметр глубины. Определение привязочного параметра глубины в последнем привязочном канале 3 основано на следующих принципах. Якорная линия автоматической . буйковой станции(ЛБС), с которой производится зондирование, устанавливается в зависимости от эпюры течения в районе постановки АБС под определенным углом к вертикали с пере,меной крутизной. Трос якорной линии подвержен большим растягивающим усилиям, при этом обеспечивается жесткость направляющей линии, в качестве которой используется, приповерх- ностный участок якорной линии. Длина
отрезка направляющего троса от места его крепления к бую до положения зонда с учетом угла отклонения троса от вертикали однозначно определяет глубину погружения зонда. Длину отрезка направляющего троса, пройденного зондом, определяют следующим / образом. На металлическую поверх., . ность направляющего троса наносятся метки например магнитные которые предохавляют собой поля остаточной намагниченности, нанесенные через заданные равные интервалы длины направляющего троса с помощью, например, постоянного или электрического Магнитов. Намагничивание производит ся при первом спуске зонда по направляющему тросу и периодически при необходимости по сигналу Запись от программно-временного устройства.По полярности считываемой магнитной метки судят о знаке направления движения зонда. -Глубина погружения зон да определяется по вертикальной составляюа ей длины найравляющего троса от поверхности воды до зонда с учетом текущего угла наклона зонда к вертикали. При движении зонда по направляющему тросу формируются сигналы прохождения зондом мимо меток, признак направления движения и сигнал начала движения. При этом непрерывно измеряется угол наклона к вергтикали оси корпуса зонда и при достижении приращением угла наклона относительно предьщущего существенного отсчета заданной апертуры фор- мируются сигналы существенных отсчетов по длине. Измеряются д.пины от;резков нaпpaв Jяющeгo троса между Соседними сигнала ли существенных отсчетов по длине и длина текущего участка направляющего троса, начиная с моментов формирования сигналов существенных отсчетов по длине,-путем подсчета числа сигналов прохождения зондом мимо меток с учетом знака направления движения. Тогда текущее значение глубины погружения - зонда можно определить по выражению:.
/т-1 ЧЦ - I O V bC05ISi; e C,OSOiwV
0
где b(tj - глубина погружения зонда
в момент отсчета tj , 0 - расстояние по вертикали между нулевым уровнем
5 поверхности моря и уровнем начала отсчета/ bj - длина -го участка аппроксимации между - -м И л -м узлами аппроксимации , сформированными в
0 моменты -I - -1 -го и i -го существенных отсчетов по длине;
)m углы отклонения зонда от вертикали соответственно
5 на i -м и И. -м участкё1М аппроксимации, измеренные в 1-4 -м и m-l-M узлах аппроксимации/ т длина текущего отрезка
0 длины на m-ом участке аппроксимации в момент отсчета tj .
В выражении (1) знак плюс ставится, если уровень начала отсчета находит5ся в верхней части направляющего троса, с которого начинается зонди рдгвание вниз, а знак минус ставится, если уровень начала отсчета находится в нижней части направляющей ли0 НИИ и зондирование производиТгся снизу вверх. Угол 1 -го существенного отсчета по длине определяется по выражению:
45
k; (л-1Но,
;где oif, - начальный УГОЛ наклона, i -f - номер существенного отсчета,
50
Дс - приращение угла (апертура) . . Благодаря адаптивному анализу изменения угла наклона информированию существенных отсчетов по длине в за55висимости от скорости изменения угла наклона (кривизны направляющей линии) рассмотренный принцип измерения глубины позволяет существенно сжать объем информации, необходимой для опре60 :деления текущей .глубины погружения зонда. . Рассмотренный принцип .
;рения глубины погружения зонда pea лизуется в системе в привязочном ка:нале 3, который работает следую1цим 65 образом. Первичный преобразователь 8
в привязочном канале 3 предназначен дляформирования сигнала Ujj (t), пропорционального углу наклона к вертикали оси корпуса зонда. Этот сигнал после преобразования в преобразователе 10 частоты в частоту F(t) и мае штабирования в арифметическом блоке 12 в виде частоты i (t) следования импульсов поступает на вход преобразователя 16 частоты, в котором формируется начальный код N н.л угла наклона. Этот код через время Т после пуска канала 3 переносится через блок 24 согласования в-блок 5 памяти Затем по первому импульсу задержанной последовательности с выхода 38 преобразователя 16 частоты канал 3 с помощью блока 14 управления переходит в режим анализа приращений угла наклона, который осуществляется с помощью преобразователя 18 частоты, компаратора 20 и блока 22 задания апертуры. На выходе 55 преобразователя 18 частоты образуется непрерывный код 4 Mci приращейия угла наклона относительно предыдущего существенного отсчета. Этот код сравнивается С кодом NO,л заданной апертуры по углу, поступающим о выхода 53. блока 22 задания апертуры. При равен стве сравниваемых кодов на выходе 57 компаратора 20 формируются сигналы too,06 существенных отсчетов по длине, по которым производится отсчет очередного отрезка длины чС направляющего троса. Измерение длины отрезков направляющего троса проиЗводится следующим образом. При движен 1 корпуса зонда относительно направляющего троса, на поверхность которого через одинаковые отрезки длины нанесены магнитные метки, в блоке 27 считывания, который может быть выполнен, например, в виде магнитной считывающей головки, в моменты прохождения меток формируются сигналы считывания tc . Эти сигналы поступаютв формирователь 31 импульсов, в кото ром в зависимости от формы и знака полярности сигнала выделяются иМпульсы считывания меток t м , признак stgntih знака направления движения и И1 4пульсы tH начала движения. Импуль сы t/и считывания, меток в зависимости от знака sign ah направления движения зонда суммируются или вычитаются в реверсивном счетчике 29 в интервале времени между двумя сигнала1МИ t
со,л существенных отсчетов по.
J
длине, по которым обнуляется реверсивный счетчик 29. На выходах 68 разрядов реверсивного счетчика 29 образуется цифровой эквивалент Nii текущего значения отрезков длины направляющего троса между узлами . аппроксимации. В моменты tco,« существенных отсчетов по длине с выходов 68 реверсивного счетчика 29 считываются йоды Wi,J отрезков длины между соседними существенными отсчетами. Последовательность записи в блок 5 Пс1мяти информации о длине отрезков направлянадего троса следующая. По сигналу i, -начала движения зонда с выхода 72 формирователя 31 импульсов и по сигналам ttOrOt существенных отсчетов по длине с выхода 57 компаратора 20 в блоке 14 управления формируется сигнал на выходе 73, обнуляющий реверсивный счетчик 29. в зависимости от сигнала 6ign fib на выходе 67 формирователя 31 импульсов, устанавливающего реверсивный счетчик 29 на сложение или вычитание, в нем начинают суммироваться импульсы i м считывания меток, поступающие с выхода 66 формирователя 31 импульсов. По сигналу ico, существенных отсчетов с выхода 57 компаратора 20 в блоке 14 управления формируются сигналы управления, которые до обнуления реверсивного счетчика 29 поступают с выхода 70 на вход разрешения блока
33отсчета и с выхода 74 на управляющий вход блока 34-согласования, через который в блок 5 памяти переносится код NI,; длины i -го участка аппроксимации, сопровойздаемый служебным кодом признака существенного отсчета по длине и кодом Aej знака приращения угла, поступающего с выхода 88 преобразователя 18 частоты. В момент формирования сигнала tjjQ существенного отсчета по одному изизмеряемых параметров опрашивается привязочный канал 3 глубины. При этом сигнал с выхода ёб блока 4 элементов задержки поступает на вход блока 30 элементов задержки-в привяэочноМ канале 3, производящего сдвиг сигналов существенных отсчетов по измеряемому параметру х и длине L направляющего троса при их совпадении
во времени. По сигналу с выхода 75 блока 30.элементов задержки в блоцге 14 управления на выходе 74 формируется сигнал, который открывает блок
34согласования, через который в бло 5 памяти записывается код Н fm текущей длины направляющего троса, на-чинай с Hi -го узла аппроксимации код сопррвозвдается служебной
информацией н,к о номере канала с существенным отсчетом по измеряемому параметру и знаке его приращения Neidn ьМх По этим данным в приемном пункте может быть определена глубина погружения зонда. Текущий угол в моменты существенных отсчетов по длине определяется по выражению (2) , а глубина - по выражению (l) . Для того чтобы избежать погрешностей при разметке длины направляющего троса при изменении его длины после установки ABC на якорь в результате растяжения якорной линии, разметку производят из зонда.Для этого служит блок записи, выполненный,например в пиде магнитной записывающей головки, и расположенный от считывающей головки на базовое расстояние, определяющее шаг квантования длины троса.. При поступлении сигнала Запись на клемму 76 от программно-временного устройства в блоке 14 управления формируется сигнал, который с выхода 71 поступает на вход блока 32 усиления, с выхода которого усиленный сигнал посту пает на вход блока 28 записи, в кото ром формируется электромагнитное по ле определенной формы, намагничивающее участок на поверхности Направляющего троса. После прохождения зонда мимо метки в блоке 27 считывания образуется сигнал считывания, который с выхода 66 формирователя 31 импульсов поступает на вход блока 14 управления, по которому на выходе 71 формируется сигнал записи очередной метки. Таким образом каждый раз когда зонд проходит базовые расстояния, производится запись новой метки Благодаря тому, что нанесение меток производится в реальных условиях на поверхность растянутого троса, устра няется погрешность от изменения-длины-троса. Реверсивный счетчик 26 слу жит для периодического повторения измерений параметров в информационных каналах 1 (2). в случае наличия сильных помех и сбоев в аппаратуре для уменьшения интегральной погрешности, В реверсивном счетчике .26 подключаются сигналы 1 ;гцсущественных отсчетов с выхода компаратора 19 Через заданное число существенных отсчетов на выходе 65 реверсивного счетчика 26 появляется сигнал, по .которому в блоке 13 управления формируются сигналы управления, аналогичные пуску канала. Блок 14 управления (фиг.2) работает следующим образом.. При поступлении сигнала Пуск на вход 39 или сигналов с реверсивного счетчика 26 на входы 65 и 87 производится установка элементов информационного привязочного канала 3 в начальное положение. При этом триггеры 89 и 90 блока 14 через элемент ИЛИ 99 устанавливаются в нулевое положение Сигнал с выхода элемента ИЛИ 99 после формирователя 92 в виде импульса поступает с выхода 45 на входы сброса преобразователей 16 и 18 частоты. По первому задержанному импульсу, появившемуся на выходе 38 преобразователя 16 частоты, триггер 90 непосредственно, а триггер 89 после задержки в элементе 96, устанавливаются в единичное положение, а через элемент ИЛИ 100 сигнал по выхрду 47 устанавливает в начальное положение преобразователь 18 частоты. При этом сигналом с прямого выхода 90 по выходу 59 блока 14 включается блок 22 задания апертуры, а сигналом с прямого выхода триггера 89 по выходу 49 блока 14 в преобразователе 18 частоты открываются элементы И, через которые начинают поступать информационные последовательности импульсов с выхода 51 преобразователя 16 частоты. По переднему фронту сигнала на выходе триггера 89, на выходе формирователя 93 образуется импульс, поступающий через выход 43 блока 14 на управляюш ий вход блока 24 согласования, через который из преобразователя 16 частоты начальный ,код угла наклона переносится в блок 5 памяти. При поступлении сигнала Запись на вход 76 блока на выходе формирователя 95 образуется импульс, который через элемент ИЛИ 103 поступает с выхода 71 блока 14 на вход блока 32 усиления, а с последнего усиленный сигнал поступает на блок 28 записи, производящего запись магнитной метки на по верхность направляющего кабель-троса. Аналогичное действие производит сигнал tm считывания магнитной метки, который с выхода 66 формирователя 31 импульсов поступает через элемент 1ШИ 103 на выход 71 блока 14 управления.. Сигнал ico.-x существенного отсчета по углу с выхода 57 компаратора 20 поступает через элемент ИЛИ 100 nd выходу 47 на вход установки в начальное положение преобразователя 18 частоты и на нулевой вход триггера 91 в блоке 14 управления. По переднему фронту сигнала с инверсного выхода триггера 91 на выходе формирователя 94 образуется импульс, который по выходу 70 блока 14 управления поступает на вход включения блока 33 отсчёта. Задним фронтом -этого импульса триггер 91 устанавливается в единичное положение, -а импульс после задержки в элементе 97 через элемент 101 по выходу 74 пос.тупает на управляющий вход блока 34 согласования; через. который в блок .5 памяти записывается код длины отрезка между двумя соседними существенными отсчетами по углу, сопровождаемый служ абной информацией о знаке приращения по углу и признаке считывания угла. Импульс с выхода элемента 97 задержки после элемента 98 задержки поступает через элемент ИЛИ 102 по выходу 73 на вход обнуления реверсивного счетчика 29, на который такжепоступает через элемент ИЛИ 102 сигнал iii начала записи с выхода 72 формирователя 31 импульсов. При формировании си1нала существенного отсчета too,к по одному из измеряемых параметров на выходе 75 блока 30 элементов задержки формируется сдвинутый относительно I со, х существенного отсчета по углу сигнал, который пройдя через элемент ИЛИ 101 по выходу 74 блока 14 управления открывает блок 34 согласования, через который в блок 5 памяти записывается код длины текущего отрезка кабель-троса, соответствующий моменту существенного отсчета.
Благодаря тому, что привязочный параметр глубины в системе определяется путем измерения вертикальной составляющей длины направляющего
троса с учетом угла наклона к вертикали оси корпуса зонда с помощью непрерывного измерения, адаптивного анализа приращения угла наклона и формирования существенных отсчетов по -длине троса и измерения участков длины между существенными отсчетами с помощью подсчета с учетом знака сигналов прохождения зонда мимо магнитных меток, нанесенных на поверхность направляющего троса, уменьшается погрешность измерения привязочного параметра глубины, в результате чего увеличивается точность измерения вертикальной струк5 туры гидрофизических параметров.
Кроме того расширяется область приме,нения системы для всепогодных усло вий эксплуатации.





| название | год | авторы | номер документа |
|---|---|---|---|
| Система для передачи телеизмерительной информации | 1982 |
|
SU1113832A1 |
| Система для передачи телеизмерительной информации | 1981 |
|
SU1037313A1 |
| Система для передачи телеизмерительной информации | 1981 |
|
SU1054828A1 |
| Система для передачи телеизмерительной информации | 1981 |
|
SU1084852A1 |
| Адаптивный аналого-цифровой преобразователь | 1982 |
|
SU1051703A1 |
| Система для передачи телеизмерительной информации | 1981 |
|
SU1023379A2 |
| Адаптивный аналого-цифровой преобразователь | 1980 |
|
SU942257A1 |
| Адаптивный аналого-цифровой преобразователь | 1979 |
|
SU866734A1 |
| Адаптивный аналого-цифровой преобразователь | 1979 |
|
SU864552A1 |
| Адаптивный аналого-цифровой преобразователь | 1983 |
|
SU1109899A1 |
1. СИСТЕМА ДЛЯ ПЕРЕДАЧИ ТЕЛЕИЗМЕРИТЕЛЬНОЙ ИНФОРМАЦИИ, содержащая в каждом информационном канале, кроме последнего, блок управления, первый выход которого подключен к первоглу входу первого блока со- гласования, второй выход - к первому входу первого и второго преобразователей частоты, третий и четвертый выходы - к второму и третьему входам второго преобразователя частоты, пятый выход блока управления соединен с первым входом реверсивного счетчика, шестой и седьмой вьисоды блока управления подключены соответственно к входу блока .задания апертуры и к первому входу второго блока согласования, первичный преобразователь , выход которого через последовательно соединенные третий преобразователь частоты и ари етичэский блок соединен с вторым входом первого преобразователя частоты, первый выход которого соединен с четвертым входом второго преобразователя частоты, первый и второй выходы которого подключены соответствённо к второму и третьему входа , ,второго блока согласования, третий выход второго преобразователя час1тоты подключен к первому входу компаратора, к второму входу которого подключен выход блока задания апертУЕИ, второй виход первого преобразователя частоты соединён с первым входом блока управления, третий выход первого преобразователя частоты соединен с вторым входом первого блока согласования, выход компаратора соединен с вторыми входа-, ми реверсивного счетчика и блока управления, к третьему входу которого подключен выход реверсивного счетчика, последний информационный канал содержит блок управления, (Л первый вь(ход которого соединен с первым входом первого блока соглас сования, первичный преобразователь, выход которого через последовательно соединенные первый преобразователь частоты и арифметический блок соединен с первыгл входом второго преобразователя частоты, первый и второй выхода которого подключены ссзответственно к второму входу пер- ел вого блока согласования и первому входу блока управления, второй вы35 Ю 35 ход которого соединен с вторым входом второго преобразозвателя частоты, выходы первого и второго блокбв . согласования каждозто ;1Нформационного канала, кроме последнего, подключены соответственно к перво й и вто-, рому входам блока памяти, к третьему, входу которого подключен выход блока согласования последнего информационного канала,выход компаратора каждого информационного канала, кроме последнего, соединен с входами блока элементов задерзхки, первые выходы которого подключены к четвертому входу блока уп равления каждого информационного
Фиг.г
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Антонов В.И., Бабий В.И., Куприянов В.К | |||
| Автономный гидрофизический измерительный комплекс.- В кн.: Автоматизация научных исследований морей и океанов | |||
| Устройство станционной централизации и блокировочной сигнализации | 1915 |
|
SU1971A1 |
| Способ закалки пил | 1915 |
|
SU140A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Гидропневматическая рессора | 1979 |
|
SU992861A1 |
| Способ изготовления электрических сопротивлений посредством осаждения слоя проводника на поверхности изолятора | 1921 |
|
SU19A1 |
