непосредственно от кривошипа эксцентриковой шестерни. Последнее наряду с существенным уменьшением величины радиуса кривошипа эксцентриковой шестерни обеспечивает значительное снижение максимальной величинь крутящего момента, передаваемого эксцентриковой шестерней и соответственно ведет к уменьшению габаритов эксцентриковой шестерни и всего привода в целом.
Эксцентриковая шестерня имеет один кривошип, а все рычаги представляют собой практически плоские элементы, что не вызывает никаких трудностей технологического характера при их изготовлении.
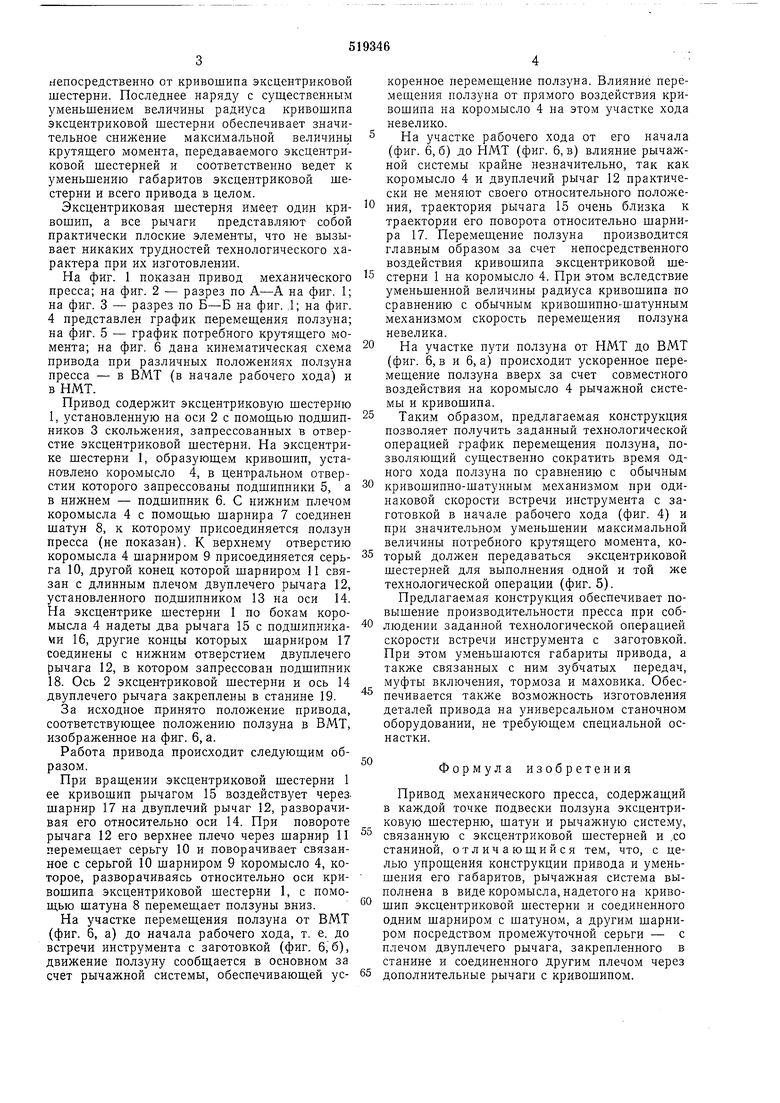
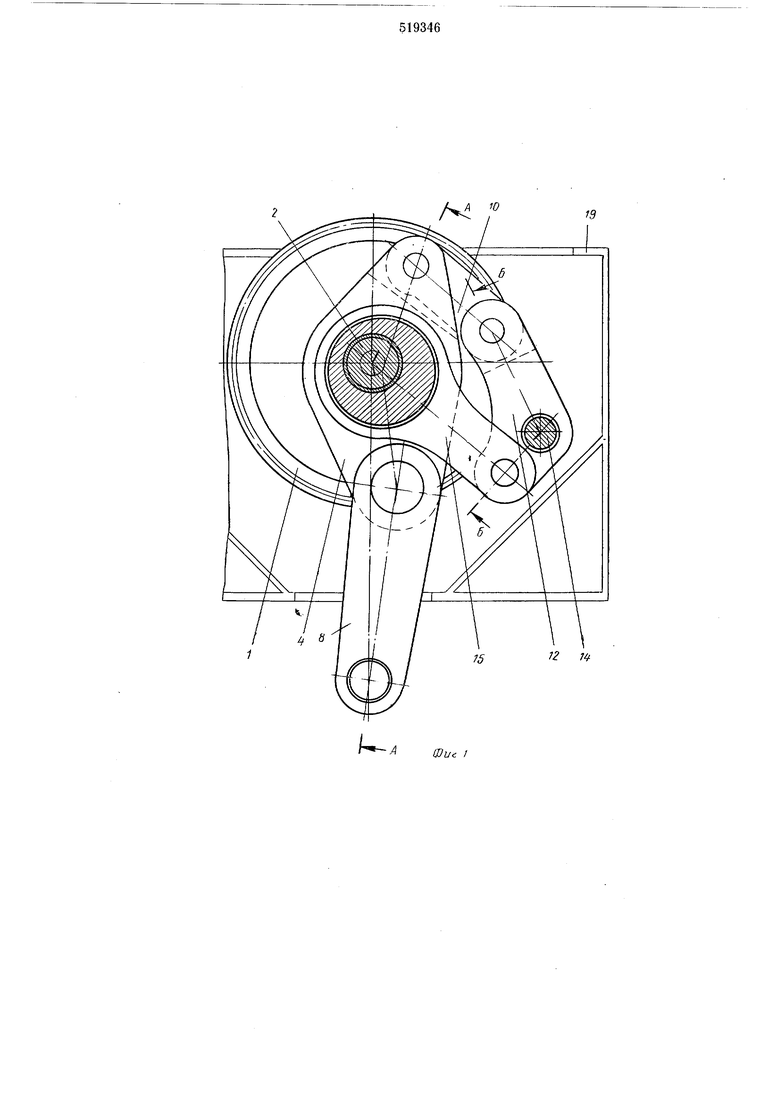
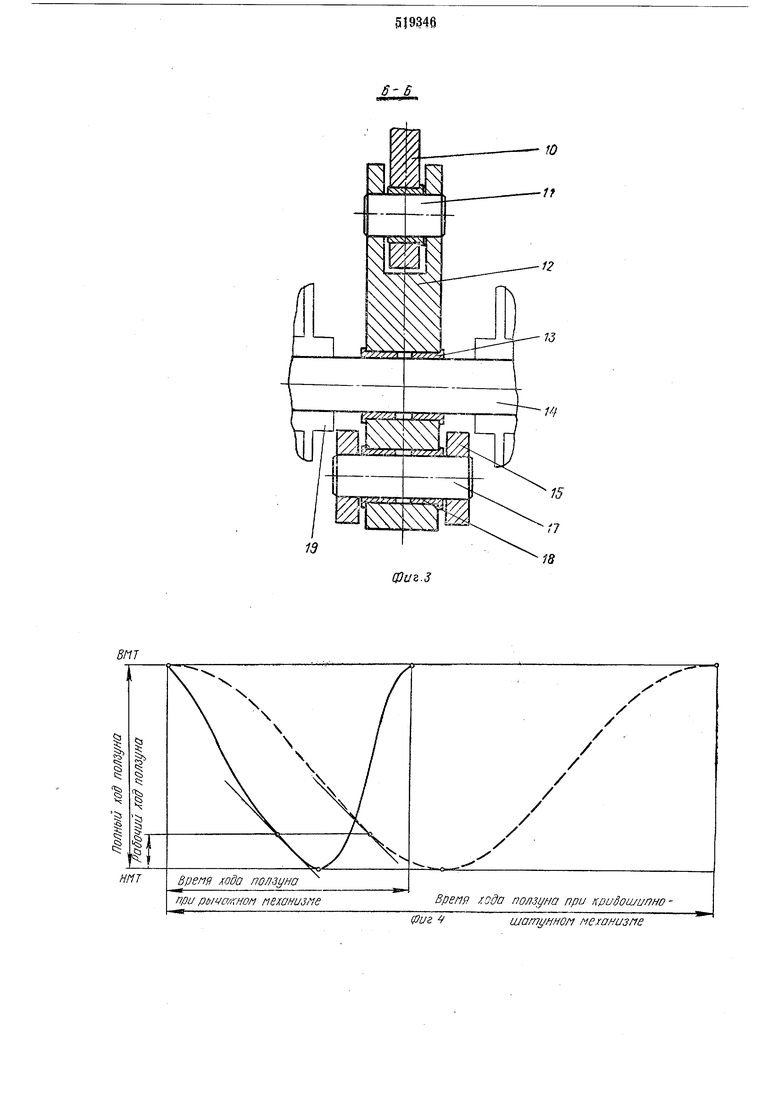
На фиг. 1 показан привод механического пресса; на фиг. 2 - разрез по А-А на фиг. 1; на фиг. 3 - разрез по Б-Б на фиг. ,1; на фиг. 4 представлен график перемещения ползуна; на фиг. 5 - график потребного крутящего момента; на фиг. 6 дана кинематическая схема привода при различных положениях ползуна пресса - в ВМТ (в начале рабочего хода) и вНМТ.
Привод содержит эксцентриковую шестерню 1, установленную на оси 2 с помощью подшипников 3 скольжения, запрессованных в отверстие эксцентриковой шестерни. На эксцентрике шестерни 1, образующем кривошип, установлено коромысло 4, в центральном отверстии которого запрессованы подшипники 5, а в нижнем - подшипник 6. С нижним плечом коромысла 4 с помощью шарнира 7 соединен шатун 8, к которому присоединяется ползун пресса (не показан). К верхнему отверстию коромысла 4 шарниром 9 присоединяется серьга 10, другой конец которой шарниром 11 связан с длинным плечом двуплечего рычага 12, установленного подшипником 13 на оси 14. На эксцентрике шестерни 1 по бокам коромысла 4 надеты два рычага 15 с подшипникаvin 16, другие концы которых шарниром 17 соединены с нижним отверстием двуплечего рычага 12, в котором запрессован подшипник 18. Ось 2 эксцентриковой шестерни и ось 14 двуплечего рычага закреплены в станине 19.
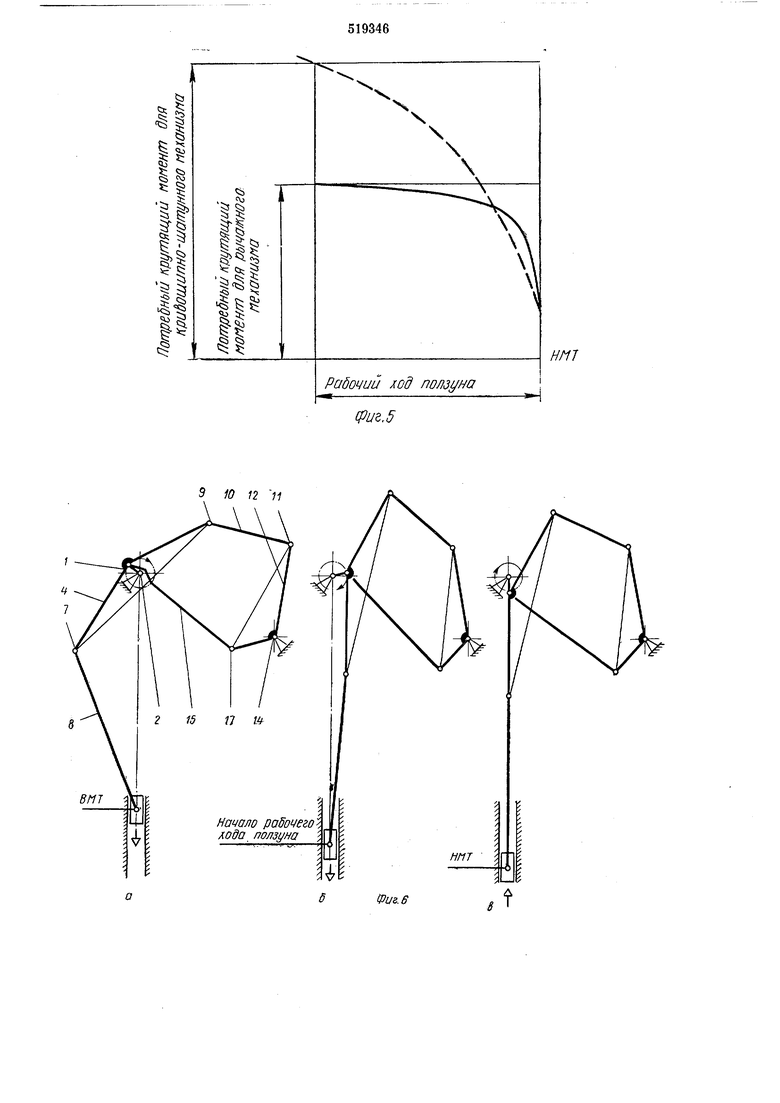
За исходное принято положение привода, соответствующее положению ползуна в ВМТ, изображенное на фиг. 6, а.
Работа привода происходит следующим образом.
При вращении эксцентриковой шестерни 1 ее кривошип рычагом 15 воздействует черезшарнир 17 на двуплечий рычаг 12, разворачивая его относительно оси 14. При повороте рычага 12 его верхнее плечо через шарнир 11 перемещает серьгу 10 и поворачивает связанное с серьгой 10 шарниром 9 коромысло 4, которое, разворачиваясь относительно оси кривошипа эксцентриковой шестерни 1, с помощью шатуна 8 перемещает ползуны вниз.
На участке перемещения ползуна от ВМТ (фиг. 6, а) до начала рабочего хода, т. е. до встречи инструмента с заготовкой (фиг. 6,6), движение ползуну сообщается в основном за счет рычажной системы, обеспечивающей ускоренное перемещение ползуна. Влияние пере.мещения ползуна от прямого воздействия кривошипа на коромысло 4 на этом участке хода невелико.
5 На участке рабочего хода от его начала (фиг. 6, б) до НМТ (фиг. 6, в) влияние рычажной системы крайне незначительно, так как коромысло 4 и двуплечий рычаг 12 практически не меняют своего относительного положения, траектория рычага 15 очень близка к траектории его поворота относительно шарнира 17. Перемещение ползуна производится главным образом за счет непосредственного воздействия кривошипа эксцентриковой шестерни 1 на коромысло 4. При этом вследствие уменьшенной величины радиуса кривошипа по сравнению с обычным кривошипно-шатунным механизмом скорость перемещения ползуна невелика.
0 На участке пути ползуна от НМТ до ВМТ (фиг. 6, в и 6, а) происходит ускоренное перемещение ползуна вверх за счет совместного воздействия на коромысло 4 рычажной системы и кривошипа.
5 Таким образом, предлагаемая конструкция позволяет получить заданный технологической операцией график перемещения ползуна, позволяющий существенно сократить время одного хода ползуна по сравнению с обычным
0 кривошипно-шатунным механизмом при одинаковой скорости встречи инструмента с заготовкой в начале рабочего хода (фиг. 4) и при значительном уменьшении максимальной величины потребного крутящего момента, который должен передаваться эксцентриковой шестерней для выполнения одной и той же технологической операции (фиг. 5).
Предлагаемая конструкция обеспечивает повышение производительности пресса при соблюдении заданной технологической операцией скорости встречи инструмента с заготовкой. При этом уменьшаются габариты привода, а также связанных с ним зубчатых передач, муфты включения, тормоза и маховика. Обеспечивается также возможность изготовления деталей привода на универсальном станочном оборудовании, не требующем специальной оснастки.
Формула изобретения
Привод механического пресса, содержащий в каждой точке подвески ползуна эксцентриковую шестерню, шатун и рычажную систему, связанную с эксцентриковой шестерней и ,со станиной, отличающийся тем, что, с целью упрощения конструкции привода и уменьшения его габаритов, рычажная система выполнена в виде коромысла, надетого на кривошип эксцентриковой шестерни и соединенного одним шарниром с шатуном, а другим шарниром посредством промежуточной серьги - с плечом двуплечего рычага, закрепленного в станине и соединенного другим плечом через дополнительные рычаги с кривошипом.
Ю
f9
72 7
u
-4СЦЦ
Ю 9
фиг-2
f
13
| название | год | авторы | номер документа |
|---|---|---|---|
| Исполнительный механизм пресса | 1981 |
|
SU958135A1 |
| Вертикальный кривошипный пресс-автомат | 1986 |
|
SU1333599A1 |
| Исполнительный механизм пресса двойного действия с шестернеэксцентриковым приводом | 1975 |
|
SU533501A1 |
| Пресс-автомат | 1987 |
|
SU1447512A1 |
| Высечные ножницы | 1980 |
|
SU867535A1 |
| ДВУХВАЛЬНЫЙ УНИВЕРСАЛЬНЫЙ КРИВОШИПНО-КОРОМЫСЛО-ШАТУННЫЙ МЕХАНИЗМ И ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ НА ЕГО ОСНОВЕ | 2004 |
|
RU2275519C1 |
| Кривошипно-шатунный механизм | 1990 |
|
SU1737190A1 |
| ЛЕСОПИЛЬНАЯ РАМА | 2014 |
|
RU2557181C1 |
| Кривошипно-рычажный исполнительный механизм привода вытяжного ползуна пресса | 1977 |
|
SU664843A1 |
| Узел прижимной плиты плоского печатно-позолотного пресса | 1987 |
|
SU1511148A1 |
ujamyfiHOfi механизме
