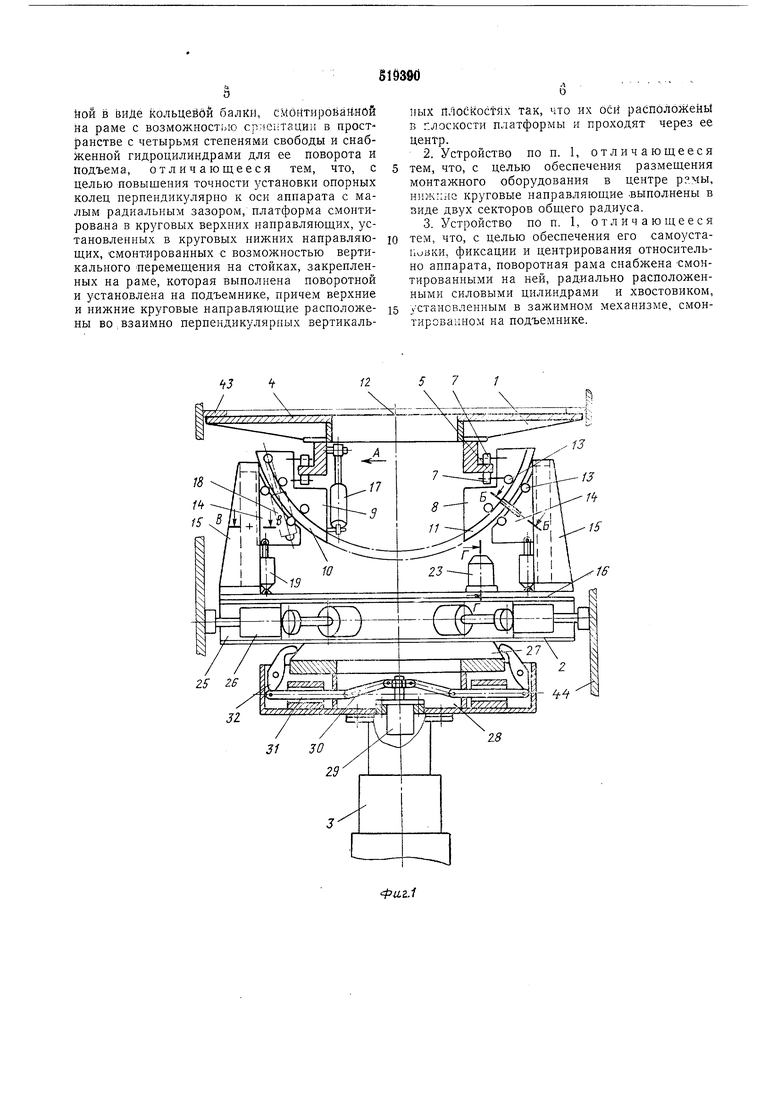
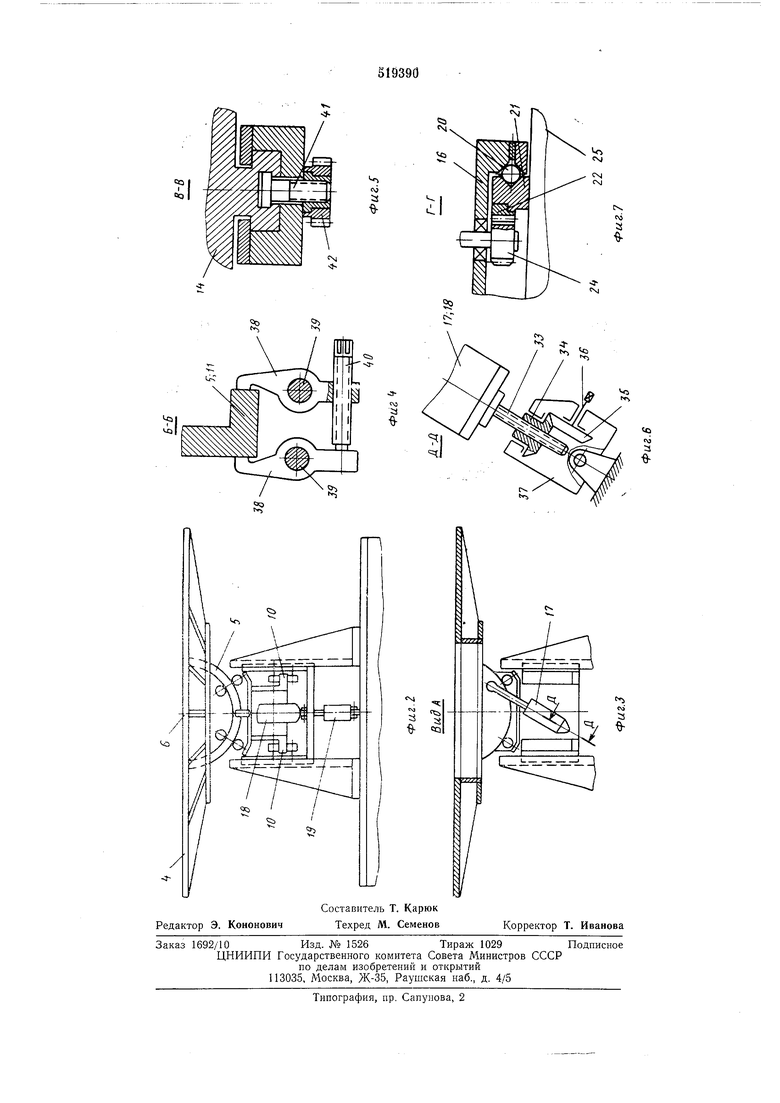
совпадающей с опорной плоскостью платформы 4 и проходящей через ее центр. Причем эта ось перпендикулярна к оси, на которой находятся центры 6 направляющих 5. Направляющие 10, 11 смонтированы подвижно в роликах 13, оси которых закреплены в ползунах 14, установленных в прямолинейных вертикальных направляющих стоек 15. Стойки 15 жестко закреплены на раме 16, выполненной поворотной. Перемещение по двум взаимно перпендикулярным осям осуществляется при помощи силовых цилиндров 17, 18. Шток силового цилиндра 17 шарнирно закреплен на нижней поверхности платформы 4, а корпус - на кронштейне 9; шток силового цилиндра 18 шарнирно закреплен на кронштейне 9, а корпус - на ползуне 14. Для осуществления вертикального перемещения платформы к ползунам 14 прикреплены штоки цилиндров 19, корпуса которых закреплены на раме 16. Рама 16 смонтирована на телах 20 качения в неподвижной направляющей 21, на которой жестко закреплено зубчатое колесо 22 с внутренним зацеплением. Па раме 16 установлен привод 23, на конце которого закреплена шестерня 24, сцепленная с колесом 22. Неподвижная направляющая 21 закреплена на верхней части рамы 25 разжимного устройства 2, внутри которой смонтированы силовые цилиндры 26, расположенные радиально и равномерно по окружности. Для равномерного разжима цилиндры снабжены синхронизирующим устройством (на чертеже не показано). Нижняя часть рамы 25 снабжена хвостовиком 27, выполненным в виде усеченного конуса и прикрепленным к раме меньшим основанием. Хвостовик 27 опирается на основание 28, которое жестко связано с подъемником 3, выполненным телескопическим или иной конструкции. Хвостовик 27 установлен в зажимном механизме, содержащем закрепленный на основании 28 силовой цилиндр 29, шток которого соединен с равномерно расположенными по окружности тягами 30 и 31 с прилсимными рычагами 32. Корпусы силовых цилиндров 17, 18 снабжены механизмами ручной регулировки. Эти механизмы состоят из винтов 33, которые жестко крепятся к корпусам силовых цилиндров, гаек-шестерен 34 и приводных шестерен 35, установленных на валах 36 ручного привода. Гайка-шестерня 34 и шестерня 35 смонтированы в корпусе 37, который шарнирно связан с соответствующими опорными элементами. Круговые направляющие 5, 11 снабжены зажимами, .состоящими из рычагов 38, укрепленных на осях 39 винта 40. Положение ползунов 14 фиксируется закладным болтом 41, приводимым от гайки-шестерни 42, связанной с приводом зажима. Опорные кольца 43 устанавливаются в аппарат 44. Устройство работает следующим odpasoivi. В установленный вертикально корпус 44 аппарата вводится устройство при помощи подъемника 3 и фиксируется на необходимой высоте при помощи гидроцилиндров 26. Во время разжима происходит расстыковка рамы 25 и подъемника, при этом шток цилиндра 29 движется вниз, поворачивая через тяги 30, 31 прижимные рычаги 32, которые отводятся от хвостовика 27. Причем работа цилиндров 25 и цилиндра 29 сблокирована таким образом, что цилиндр 29 начинает работу после того, как прижимы цилиндров 26 коснутся стенок корпуса аппарата. Этим достигается самоустановка рамы 25 с платформой 1 относительно оси корпуса аппарата, а горизонтальные изгибающие усилия не передаются на подъемник. Монтируемое опорное кольцо 43 закрепляется на верхней плоскости стола 1 платформы 4, которая благодаря круговым направляющим 5, 10, И и силовым цилиндрам 17, 18 имеет возможность поворачиваться относительно двух взаимно перпендикулярных осей, совпадающих с опорной плоскостью платформы 4. Точка пересечения этих осей является центром окружности монтируемых колец и корпуса аппарата, поэтому при качании платформы центр качания остается неподвижным, что обеспечивает возможность устанавливать платформу с кольцом перпендикулярно к оси корпуса аппарата; причем, радиальный зазор между кольцом и корпусом аппарата достаточно мал. Точная установка платформы по высоте осуществляется двумя работающими синхронно цилиндрами 19, которые перемещают ползуны 14 по направляющ1;м стоек 15. Разворот платформы относительно вертикальной оси осуществляется от привода 23, шестерни 24, которая, обкатываясь по неподвижному колесу 22, приводит во вращение раму 16. Для более тонкой регулировки положения платформы 4 имеется возможность перемещать сами цилиндры 17, 18 при помощи винта 33, который приводится в движение через гайку-шестерню 34 и коническую шестерню 35. Шестерня 35 приводится во вращение валиком 36, на конце которого имеется маховичок (на чертеже не показан). После окончательной усгановки платформы 4 в требуемое положение круговые направляющие 5, 11 зажимаются рычагами 38, которые приводятся в движение винтом 40, а вертикальные направляющие ползунов 14 зажимаются закладным болтом 41, который приводится от гайки-шестерни 42. Формула изобрете.ния 1. Подъемно-опускное устройство, наприер, для установки опорных колец внутри ертикальных аппаратов, содержащее раму с одъемно-поворотной платформой, выполненйой в виде кольцейдй балКи, сМонтироЁайной на раме с возможноспло ср/юптации в пространстве с четырьмя степенями свободы и снабженной гидроцилиндрами для ее поворота и подъема, отличающееся тем, что, с целью повышения точности установки опорных колец перпендикулярно к оси аппарата с малым радиальным зазором, платформа смонтировала в круговых верхних направляющих, установленных в круговых нижних направляющих, смонтированных с возможностью вертикального перемещения на стойках, закрепленных на раме, которая выполнена поворотной и установлена на подъемнике, причем верхние и нижние круговые направляющие расположены во,,взаимно перпендикулярных вертикальиых n/ioCKoctflx так, что их оси расположены в плоскости платформы и проходят через ее Центр.
2.Устройство по п. 1, отличающееся тем, что, с целью обеспечения размещения монтажного оборудования в центре р.мы, нижние круговые направляющие выполнены в виде двух секторов общего радиуса.
3.Устройство по п. 1, отличающееся тем, что, с целью обеспечения его самоустаПоаки, фиксации и центрирования относительно аппарата, поворотная рама снабжена смонтированными на ней, радпально расположенными силовыми цилиндрами и хвостовиком, установленным в зажимном механизме, смонтированном на подъемнике.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для установки труб в трубные решетки теплообменников | 1983 |
|
SU1186452A1 |
| Устройство для отбортовки цилиндрических изделий | 1985 |
|
SU1329866A1 |
| СЪЕМНИК ПЯТНИКА ВАГОНА | 2009 |
|
RU2405691C2 |
| Устройство для маркирования листового материала | 1982 |
|
SU1159679A1 |
| ТРУБОГИБОЧНАЯ УСТАНОВКА ДЛЯ ИЗГОТОВЛЕНИЯ ЗМЕЕВИКОВ | 1996 |
|
RU2101115C1 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2008 |
|
RU2385284C1 |
| Установка для сборки и сварки секций трубопроводов | 1980 |
|
SU929382A1 |
| Устройство для свертывания конических обечаек | 1973 |
|
SU482228A1 |
| "Устройство для сборки цилиндрических сооружений | 1974 |
|
SU510343A1 |
| Устройство для снятия поглощающего аппарата с железнодорожного транспортного средства | 1988 |
|
SU1532381A1 |
J/ 30
f .,t X
