(54) СИСТЕМА УПРАВЛЕНИЯ СТРЕЛОВЫМ
КРАНОМ
имости объекта и окружающих предметов, апример под водой или в дыму. В этих слуаях необходимую траекторию и точпость становки груза обеспечить очень трудно.
Цель изобретения создание такой системы управления кранами, которая обеспечивает высокое качество работ в сложных условиях эксплуатации грузоподъемной машины,
Указанная цель достигается тем, что известная система управления стреловыми кранами снабжена датчиками пути с задатчика ми и механизмами обратной связи, соединенными с органами управления, оборудованны ми панелями с координатными сетками, одна из которых расположена в горизонтальной плоскости, а другая - в вертикальной.
Первый орган управления выполнен в виде стержня с зубчатой рейкой и рукоятью на конце, расположенного с возможностью перемещения внутри горизонтального участка Тобразной трубы, в которой установлена контактирующая с зубчатой рейкой щестерня. При этом рукоять связана с задатчиками скорости, выходной вал шестерни - с задатчиком пути и механизмом обратной связи поворота крана, а вертикальное основание Тофазной трубы - с задатчиком угла и механизмом обратной связи стреловой лебедки.
Второй орган управления выполнен в виде кривошипно-кулисного механизма с двумя направляющими прорезями. При этом рукоять управления установлена непосредственно на кулисе и связана с помощью промежуточного элемента, например цепи и звездочкИа с механизмом обратной связи и задатчиком длины грузового каната, а кривощип, имитирующий длину стрелы, связан с датчиком подъема стрелы и механизмом обратной связи стреловой лебедки.
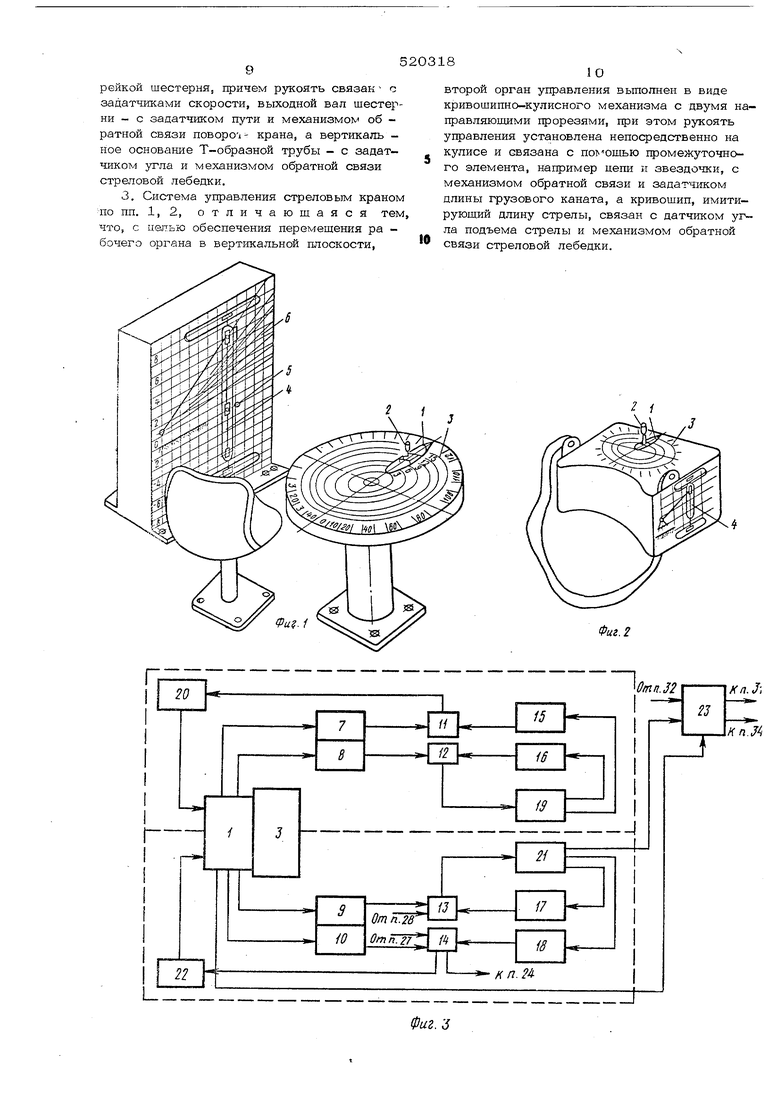
На фиг. 1 изображен пульт управления в стационарном исполнении, общий вид; на фиг, 2 - переносной пульт управления, общий вид; на фиг. 3 - часть системы управления, обеспечивающая перемещение рабочего органа мащины в горизонтальной плоскости на фиг. 4часть системы управления, обеспечивающая перемещение рабочего органа машины в вертикальной плоскости; на фиг. 5 - орган упавления для горизонтального перемещения; на фиг, 6 - то же, вид сверху; на фиг. 7 орган управления для вертикального перемеения; на фиг. 8 - рукоять органа управления для вертикального перемещения; на фиг. О - звездочка того же органа управления; а фиг, 10 - разрез по А-А на фиг, 7,
В кабине мащиниста устанавливается ульт управления (см, фиг, 1), на котором азмещаются орган управления 1 с рукоятью 2 и горизонтальной панелью 3, где нанесеа радиальная и градусная сетка, а также орган управления 4 с рукоятью 5 и вертикальной панелью 6 с вертикальной,горизон тальной и градусной сеткой.
Мащинисту по сетке на панели или в соответствии с планом рабочей обстановки, который может закреален под верхней прозрачной крышкой панели 3, выбирает траекторию движения рабочего органа в горизонтальной плоскости.
Вертикальная панель 6 дает возможность машинисту выбрать траекторию движения рабочего органа в вертикальной плоскости, по сетке или профильному сечению обстановки в одной из вертикальных плоскостей.
Обе панели 3 и 6 и размеры органов управления имеют один масштаб и имит1фуют зону, обслуживаемую краном в горизонтальной и вертикальной плоскостях.
ВыщеописанньиЗ: пульт управления выполнен стационарным и может быть установлен непосредственно в кабине машины или в специально оборудованной кабине, расположен ной на расстоянии от машины.
Однако пульт управления может быть выполнен и переносным (см. фиг. 2).
Мащина может быть снабжена, одним из указанных пультов управления. Далее для простоты изложения описьшается стационарный пульт управления.
Система управления грузоподъемными машинами условно может быть разделена на две части, одиа из которых осуществляет управление рабочими машинами в горизонтальной плоскости органом управления 1, а другая - в вертикальной плоскости органом управления 4.
Орган управления 1 (см, фиг. 3) с горизонтальной панелью 3 соединен с задатчи ком пути 7, задатчиками скорости 8 и 9 и задатчиком угла подъема 10. стрелы. Выходные сигналы этих задатчиков поступают в устройства 11-14, где они сравниваются с сигналами, поступающими от соответствующих датчиков пути 15, скорости 16 и 17 и угла подъема стрелы 18, Скорость поворо та крана регулируется исполнительным механизмом поворота 19, от которого .срабатывает датчик пути 15 и датчик скорости 16, Механизм обратной связи 20 приводится в действие сравнивающим устройством 11.
Скорость работы стреловой лебедки регулируется исполнительным механизмом 21 стреловой лебедки, от которого срабатывают соответствующий датчик скорости 17 и датчик 18, а механизм обратной связи 22 приводится в действие сравнивающим устройством 14,
Т1ри включении в работу исполнительного механизма 21 начинает функционировать система горизонтального пере 1ещения груза 23, Сигнал рассогласования от сравнивающего устройства 14 поступает на механизм обрат-
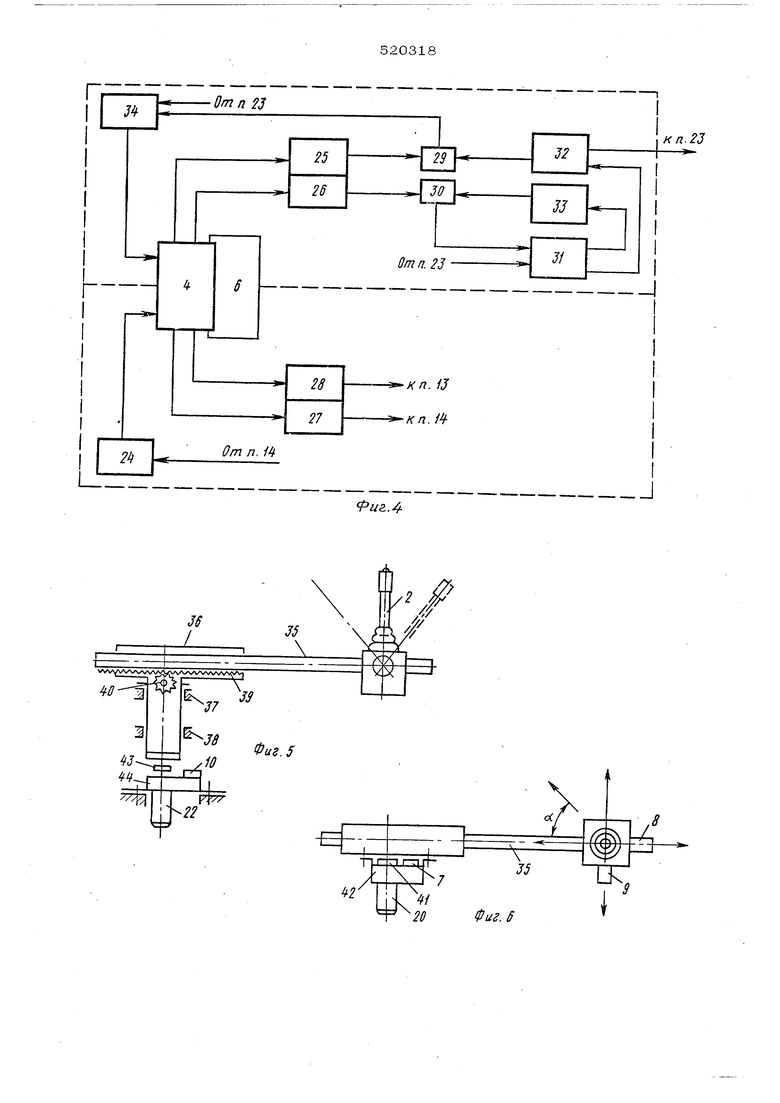
ной связи 24 (см. фиг. 4), взаимодействующий с органом управления 4, осуществляю щим перемещение рабочего органа в верти - кальной плоскости.
Орган управления 4 с вертикальной па нелью 6 соединен с задатчиком пути 25, задатчиком 26 скорости работы грузовой ле бедки, задатчиком угла 27 и задатчиком скорости работы 28 лебедки. Выходные сигна лы задатчиков 25 и 26 поступают в срав нивающие устройства 29 и 30, а от за:датчиков 27 и 28 - в сравнивающие устройств ва 13 и 14 цепи управления исполнительным механизмом 21 стреловой лебедки.
Регулирование скорости работы грузовой лебедки осуществляется исполнительным механизмом 31 по сигналу сравнивающего устройства 30, при этом исполнительный механизм 31 включает в работу, датчик пути 32 и датчик скорости 33 и получает корректирующий сигнал от системы горизонтального перемещения груза 23. В то же время с датчика 32 выходной сигнал поступает на вход системы горизонтального перемещения груза 23. Сравнивающее устройство 29 управляет работой механизма обратной связи 34, перемещающего орган управления 4.
Таким образом, регулирование скорости стреловой лебедки осуществляется включе - нием исполнительного механизма 21, который приводит в движение стрелу, которая, в свою очередь, приводит в движение датчик угла поворота, подающий сигнал сравнивающему устройству 14. Сравнивающее устройство 14 приводит в действие механизм обратной связи 24 на органе управления 4 и одновременно механизм обратной связи 22 иа органе управления 1.
Управление всеми механизмами системы осуществляется с помощью органов управления 1 и 4, которые для обеспечения всех требуемых функций выполнены комбинированными.
Орган управления 1 (см. фиг. 5) состоит из стержня 35, которьй перемещается внутри горизонтального участка Т-образной трубы 36 с вертикальным основанием, установленной на опорах 37, 38. На стержне 35 размещена рукоять 2, связанная с задатчиками скорости 8,9. Задатчик 8 обеспечивает пропорциональное регулирование скорости механизма поворота крана в зависимости от угла поворота рукояти 2. Задатчик 9 обес печивает пропорциональное регулирование угловой скорости механияма изменения вылета стрелы. Рукоять 2 обеспечивает включение поворота крана движением поперек рукояти механизма изменения вылета - движением вдоль рукоятки и совмещение двух этих движений - движением рукояти 2 под углом яС
Стержень 35 связан с механизмом об ратной связи 20 и задатчиком пути 7 перемещения груза по радиусу с помощью, на пример, зубчатой рейки 39, закрепленной на стержне 35, шестерни 40, установленной в Т-образной трубе 36, муфты 41, редуктора 42, а с механизмом обратной связи 22 и задатчиком угла подъема 10 механизма поворота - с помощью муфты 43 и редуктора 44.
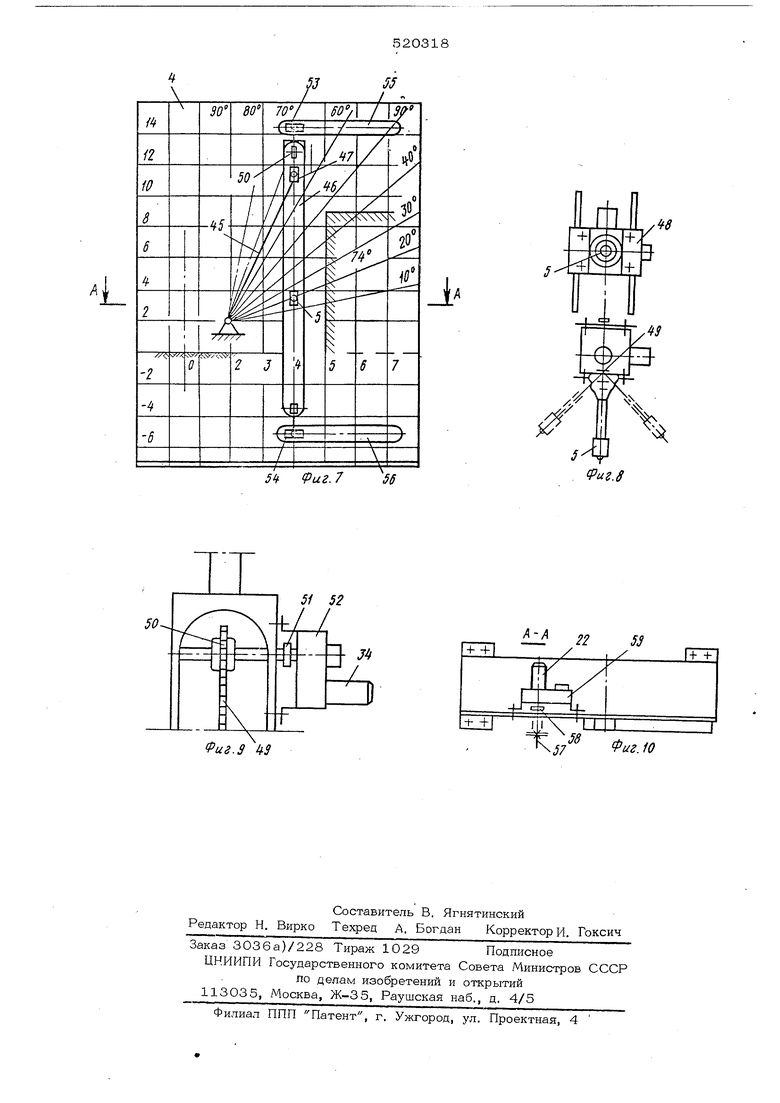
Комбинированный орган управления 4 (см. фиг. 7) состоит из кривощипа 45, имеющего масштаб шкал панелей 3 и 6, соответствующего длине стрелы, кулисы 46, в прорези которой установлен ползун 47 криво шипа 45 и ползун 48, на котором крепит ся рукоять 5 и к которому прикреплена, например, цепь 49 (фиг. 8), приводимая во вращение звездочкой 50 (фиг. 9) через муфту 51 и редуктор 52 от механизма обратной связи 34 грузовой лебедки.
Концевые точки кулисы 46 закреплены на ползунах 53, 54, установленных в верхней 55 и нижней 56 направляющих. Ход ползуна 48 в масштабе соответствует сумме максимальной высоты подъема и глубины опускания крюка. Кривошип 45 (фиг. 10) осью 57 связан с механизмом обратной связи 22,который приводит его в движение с помощью муфты 58 и редуктора 59.
Система управления работает следующим образом.
Орган управления 1 обеспечивает пере мещение крюка (груза) в горизонтальной плоскости по oкpvжнocти, радиусу и любой заданной траектории,
Для поворота машины, например, влево машинист наклоняет рукоять 2 (силовым движением) в левую сторону, приводит в действие задатчик скорости 8 механизма поворота, которьй выдает сравнивающему устройству 12 сигнал, пропорциональный тлу поворота рукояти. Сравнивающее устройство 12 включает исполнительньй механизм 19, который приводит в действие датчик пути 15. На сравнивающем устройстве 11 появляется рассогласование. Механизм обратной связи 20 включается и произво дит перемещение органа управления 1 по радиусу в левую сторону на угол, соответствующий углу поворота машины. Для увеличения скорости поворота увеличивают угол наклона рукоятки 2, при этом для удержания последней необходимо большее усилие. Поворот машины в правую сторону производится аналогично.
Для перемещения рабочего органа (крюка) по радиусу вперед рукоять наклоняют вперед (см. пунктирное изображение на фиг. 5). При этом приводится в действие задатчик скорости 9, а на сравнивающее устройство 13 поступает сигнал, пропордиональ ный углу наклона рукояти. И оно включает исполнительньш механизм 21. Стрела при водит в действие датчик скорости 17, датчик угла подъема стрелы 18 и систему горизонтального переметения груза 23, ко торая в соответствии с величиной подъема (или опускания) головки стрелы производит включение подъема или опускания груза. Датчик угла подъема стрелы подает соответ ствующий углу перемещения стрелы сигнал сравнивающему устройству 14, которое вкл чает механизм обратной связи 24, обеспечивающий соответствующее перемещение органа управления 1. Так как управление стрелой возможно и органом управления 4, то устройство 14 осуществляет включение механизма обратной связи 24 на органе уп равления 4, в результате чего перемещается кулиса 46. Исполнительный механизм 31 грузовой Л ::бедки, включенный с помощью системы горизонтального перемещения груза 23, через датчик пути 32, сравнивающее устройство 29 и механизм обратной связи 34, про изводит соответствующее перемещение ползуна 48 с рукоятью 5 по кулисе 46. Таким образом отслеживается положение рабочего оборудования мащины на органах управле - ния 1 и 4. При наклоне рукояти органа управления 1 в горизонтальной плоскости под углом о. к оси стержня 35 включается механизм поворота крана и стрелоподъемньш механизм, а крюк (груз) соверщает движение в горизонтальной плоскости, по сложной траекто рии. Орган управления 4, снабженньш верти кальной панелью, обеспечивает перемещение крюка (груза) по вертикали и горизонтали по любой заданной кривой в вертикальной плоскости. Включение механизма подъема груза на подъем осуществляется перемещением рукояти 5 .верх, которая приводит в действие задатчик скорости 26, вьщающий сигнал сравнивающему устройству. 30 и т. д. по аналогии с вышеописанным способом пере мещения органа управления 1. В результате крюк (груз) перемещается вверх, и рукоять 5 с помощью механизма обратной связи 34, расположенного, наприм в верхней части кулисы, также перемещается вверх. Включением рукояти управления вниз обеспечивается опускание груза. При наклоне пукояти в горизонтальной плоскости осуществляется перемещение стр лы, а с помощью сравнивающего устройст - ва 14 включается механизм обратной связи 22, который перемещает кривошип 45. Срав8нивающее устройство 14 одновременно приводит в действие механизм обратной связи на органе управления 1, который перемещает рукоять 2. Для обеспечения горизонтального пере мещения груза орган управления 4 осуществляет включение системы горизонтального перемещения груза 23. Таким образом, предлагаемая система управления обеспечивает регулирование скоростей в диапазоне 1:30 в соответствии с требованиями, предъявляетч ъгми к кранам, и осуществляет движение груза по любой задан ной траектории, что исключает возможность аварийных ситуапий. Положительные качества предлагаемой системы обеспечиваются наличием механизмов обратной связи, исклю-. чающих рассогласование положения рабочегс органа и механизма и обеспечивающих перемещение груза в соответствии с заданными координатами двумя комбинированными органами управления. Благодаря перечисленным свойствам система позволяет увеличить производитель - ность машины при нахождении машиниста (оператора) на расстоянии более 200 м и.-,. в случаях плохой видимости машины и монтируемого объекта, а также в стесненных .условиях. Формула изобретения 1.Система управления стреловым кра ном, содержащая датчики и задатчики ско рости и угла подъема стрелы, сравнивающие устройства, соединенные с ними исполнительные механизмы грузовой и стреловой лебедок и два органа управления, отличаю щ а яс я тем, что, с целью повышения точности перемещения рабочего органа крана при нахождении оператора на значительном от него расстоянии, при плохой видимости или & стесненных условиях, система снабжена датчиками пути с задатчиками и механизмами обратной связи, соединенными с органами управления, оборудованными панелями с координатными сетками, одна из которых расположена в горизонтальной плоскости, а другая - в вертикальной. 2.Система управления стреловым краном поп, 1,о тличающаяся тем, что, с пелью обеспечения перемещения рабочего органа в горизонтальной плоскости, первый орган управления выполнен в виде стержня с зубчатой рейкой и рукоятью на конпе, расположенного с возможностью перемещение внутри горизонтг-.тьного участка Т-образной трубы с верт .;;.;:г;chvi основанием, в кото бО РОЙ установлена контактирующая с зубчатой
рейкой шестерня, причем рукоять связан с задатчиками скорости, выходной вал шестерни - с задатчиком пути и механизмов об ратной связи noBopoi- крана, а вертикаль ное основание Т-образной трубы - с задатчиком угла и механизмом обратной связи стреловой лебедки.
3. Система управления стреловым краном по пп. 1, 2, отличающаяся тем что, с цепью обеспечения перемещения ра бочего органа в вертикальной плоскости,
второй орган управления выполнен в виде кривошипно-кулисного механизма с двумя направляющими прорезями, при этом рукоять управления установлена непосредственно на кулисе и связана с по ошью промежуточного элемента, например цепи и звездочки, с механизмом обратной связи и задатчиком длины грузового каната, а кривошип, имитирующий длину стрелы, связан с датчиком угла подъема стрелы и механизмом обратной связи стреловой лебедки.
Фиг. 2
Kn.J

| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УМЕНЬШЕНИЯ РАСКАЧИВАНИЯ ГРУЗА ПРИ ПОДЪЕМЕ СТРЕЛОВЫМ КРАНОМ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2422354C1 |
| ПОДЪЕМНИК АВТОМОБИЛЬНЫЙ ГИДРАВЛИЧЕСКИЙ | 2001 |
|
RU2199484C2 |
| СПОСОБ ЗАЩИТЫ СТРЕЛОВОГО ГРУЗОПОДЪЕМНОГО КРАНА ОТ ПЕРЕГРУЗКИ (ВАРИАНТЫ) | 2006 |
|
RU2322382C1 |
| СПОСОБ УПРАВЛЕНИЯ ГРУЗОПОДЪЕМНЫМ КРАНОМ | 2010 |
|
RU2440924C1 |
| СИСТЕМА ЗАЩИТЫ ГРУЗОПОДЪЕМНОГО КРАНА | 2002 |
|
RU2237006C2 |
| Устройство управления стреловым краном | 1974 |
|
SU645929A1 |
| СПОСОБ УПРАВЛЕНИЯ ГРУЗОВОЙ УСТОЙЧИВОСТЬЮ МОБИЛЬНОГО ГРУЗОПОДЪЕМНОГО КРАНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2349536C1 |
| СПОСОБ ПОВЫШЕНИЯ БЕЗОПАСНОСТИ (ВАРИАНТЫ) И СИСТЕМА БЕЗОПАСНОСТИ СТРЕЛОВОГО ГРУЗОПОДЪЕМНОГО КРАНА (ВАРИАНТЫ) | 2009 |
|
RU2396201C1 |
| СПОСОБ НАСТРОЙКИ ПРИБОРА БЕЗОПАСНОСТИ ГРУЗОПОДЪЕМНОГО КРАНА И РЕАЛИЗУЮЩИЙ ЕГО ПРИБОР БЕЗОПАСНОСТИ | 2005 |
|
RU2307061C1 |
| СПОСОБ ЗАЩИТЫ СТРЕЛОВОГО ГРУЗОПОДЪЕМНОГО КРАНА | 2004 |
|
RU2271332C2 |
Фиг.В
