(54) ПЕРЕДВИЖНОЙ ПОДЪЕМНИК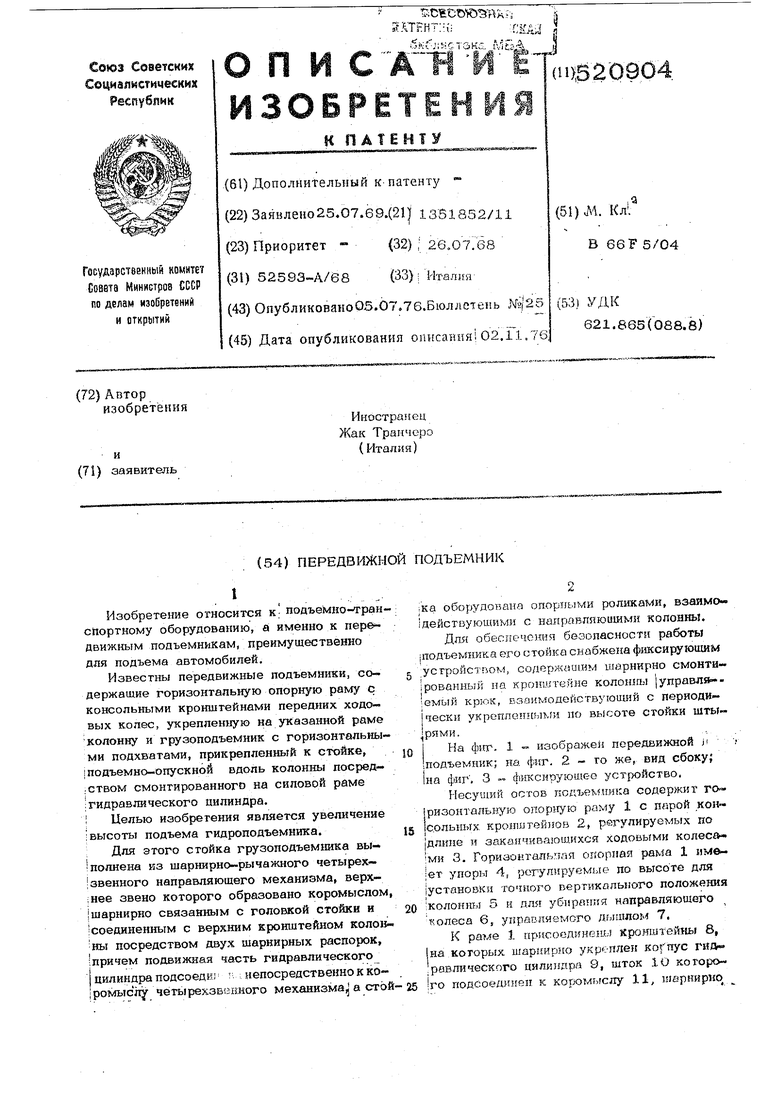
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОДЪЕМНИК ДЛЯ ОБСЛУЖИВАНИЯ АВТОМОБИЛЕЙ | 1992 |
|
RU2033383C1 |
| ОТКРЫВАЮЩАЯСЯ КРЫША КУЗОВА ТРАНСПОРТНОГО СРЕДСТВА, СПОСОБ И УСТРОЙСТВО ДЛЯ ЕЕ ПЕРЕМЕЩЕНИЯ | 2004 |
|
RU2308389C2 |
| Стенд для правки кузовов | 1982 |
|
SU1061881A1 |
| Подъемник | 1989 |
|
SU1744061A1 |
| ТРАНСПОРТНО-УСТАНОВОЧНЫЙ АГРЕГАТ СТАРТОВОГО РАКЕТНОГО КОМПЛЕКСА | 2011 |
|
RU2478539C2 |
| ПЕРЕДВИЖНОЕ ГРУЗОПОДЪЕМНОЕ УСТРОЙСТВО | 1997 |
|
RU2137700C1 |
| Мостовой кран | 2023 |
|
RU2820482C1 |
| ГРУЗОВАЯ КАРЕТКА ГРУЗОПОДЪЕМНИКА ПОГРУЗЧИКА | 2024 |
|
RU2828413C1 |
| УСТРОЙСТВО ДЛЯ УКЛАДКИ И ЗАМЕНЫ ЭЛЕМЕНТОВ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ И СПОСОБ ЗАМЕНЫ ЭЛЕМЕНТОВ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 1992 |
|
RU2072015C1 |
| Устройство для кантования длинномерных грузов | 1972 |
|
SU470324A1 |
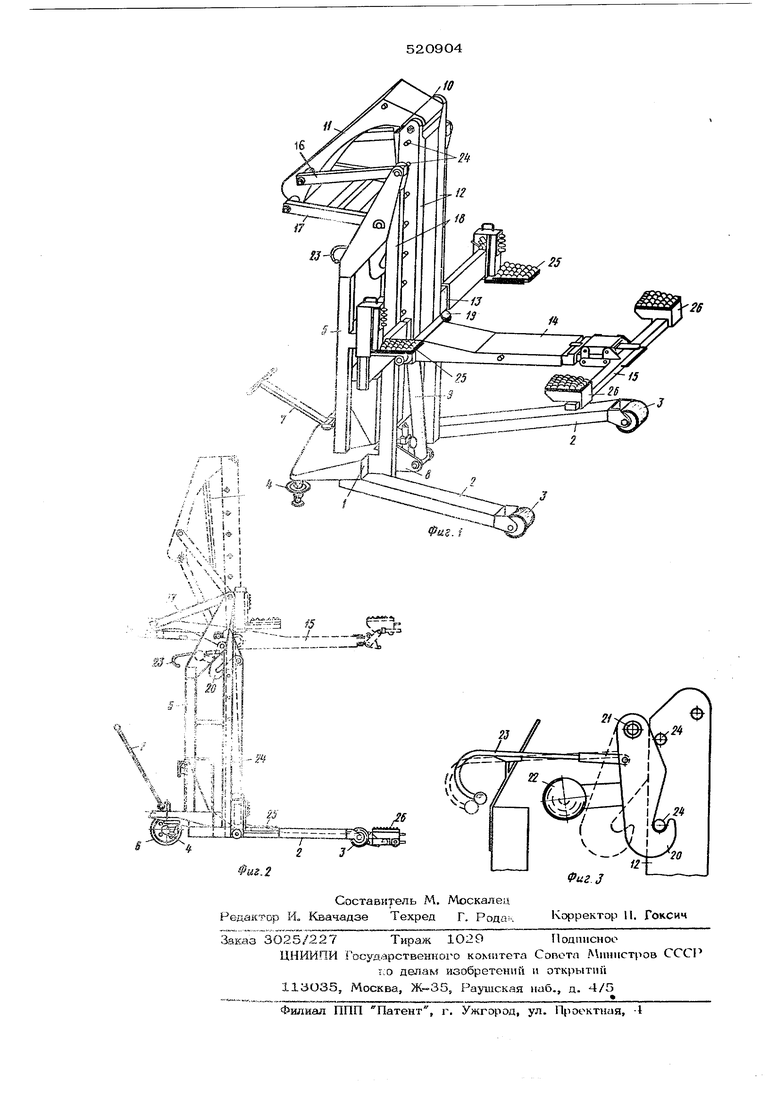
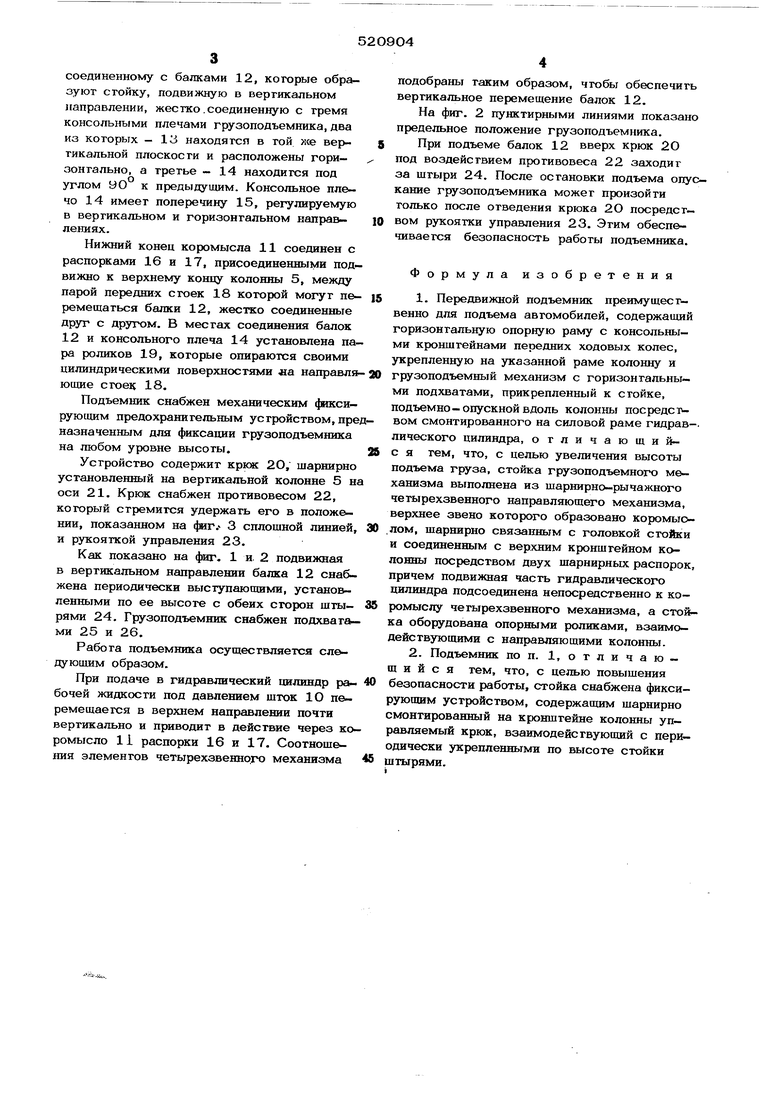
Изобретение относится К; подъемно-тран спортному оборудованию, а именно к пере движным подъемникам, преимущественно для подъема автомобилей. Известны передвижные подъемники, содержащие горизонтальную опорную раму с консольными кронштейнами передних ходовых колес, укрепленную на указанной раме колонну и грузоподъемник с горизонтальны ми подхватами, прикрепленный к стойке, I подъемно-опускной вдоль колонны посред..ством смонтированного на силовой раме ;гидравлического цилиндра. i Целью изобретения является увеличение ; высоты подъема гидроподъемника. ; Для этого стойка грузоподъем1шка выполнена кз шарнирно-рычажного четырех- |звенного направляющего механизма, верхшее звено которого образовано коромыслом |шарнирно связанным с головкой стойки и соединенным с верхним кронштейном колон ны посредством двух шарнирных распорок, причем подвижная часть гпдравлического j цилиндра подсоеди; i,; непосредственно к ко|ромыспу четырехзвенного механизма а сто ;Ка оборудог5а1ш опорными роликами, взаимо- действу ошими с направлпюищми колонны. Дпя обеспечош1Я безопасности работы 1подъемнкка его стойко снабжена фиксируюишм усгройстоом, содержаишм шарнкрно смонти- 1рованный на крониггейне колонлы (управл iewbifi крюк, взаимодействующий с периоди- I чески укреплепнь1 ли по высоте стойки шты- рями. На фиг. 1 - изображен передвижной л ; подъемник; на фг5Г. 2 - го же, вид сбоку; 1на фиг . 3 - фиксирующее устройство, Несущий остов подъемника содержит га- ризонтапьную опорную раму 1 с порой Kostсольных кронштей1 ов 2, регулируемых по |Длине и закаячиваюидихся ходовыми колеса ыи 3. Гориаонгапь.тая оггорпая рама 1 упоры 4, регулируемые по высоте для {установки точного вертикального положения :Колон1Ш1 5 и для убирания направляющего колеса 6, управляемого дышло1 7. К раме 1. присоединегил хрсжштейны 8, на которь х шариирио укреплен Kofnyc гидг равлического цилиндра 9, шток 1.0 ко горе го подсоеяикеп. к коромьгслу 11, шарнирш
соединенному с балками 12, когорые образуют сгойку, подвижную в вертикальном направлении, жестко.соединенную с гремя консольными нлечами грузоподъемника, два из которых - 13 находятся в той исе вертикальной плоскости и расположены гори- зонтально, а третье - 14 находится под углом 9О к предыдуишм. Консольное плечо 14 имеет поперечину 15, регулируемую в вертикальном и горизонтальном напрев- лениях.
Нижний конец коромысла 11 соединен с распорками 16 и 17, присоединенными подвижно к верхнему концу колонны 5, между парой передних стоек 18 которой могут пе- ремещаться балки 12, жестко соединенные друг с другом. В местах соединения балок 12 и консольного плеча 14 установлена пара роликов 19, которые опираются своими цилиндрическими поверхностями «а направля юсцие стоек 18.
Подъемник снабжен механическим фиксируюишм предохранительным у с тройством, преназначенным для фиксации грузоподъемника на любом уровне высоты.
Устройство содержит кркж 2О, шарнирно установленный на вертикальной колонне 5 н оси 21. Крюк снабжен противовесом 22, который стремится удержать его в положении, показанном на фиг,- 3 сплошной линией, и рукояткой управления 23.
Как показано на фиг. 1 и. 2 подвижная в вертикальном направлении балка 12 снабжена периодически выступаюошми, установленными по ее высоте с обеих сторон шты- рями 24. Грузоподъемник снабжен подхватами 25 и 26.
Работа подъемника осуществляется следующим образом.
При подаче в гидравлический цилиндр рабочей жидкости под давпением шток 1О перемещается в верхнем направлении почтн вертикально и приводит в действие через коромысло 11 распорки 16 и 17. Соотношения элементов четырехзвеннрго механизма
подобраны таким образом, чтобы обеспечить вертикальное перемещение балок 12.
На фиг. 2 пунктирными линиями показано предельное положение грузонодъемника.
При подъеме балок 12 вверх крюк 2 О под воздействием противовеса 22 заходит за штыри 24. После остановки подъема опускание грузоподъемника может произойти только после отведения крюка 2О посредством рукоятки управления 23. Этим обеспечивается безопасность работы подъемника.
Формула изобретения
