(54) УСТРОЙСТВО ДЛЯ СБРАСЫВАНИЯ СПАСАТЕЛЬНЫХ ПЛОТОВ
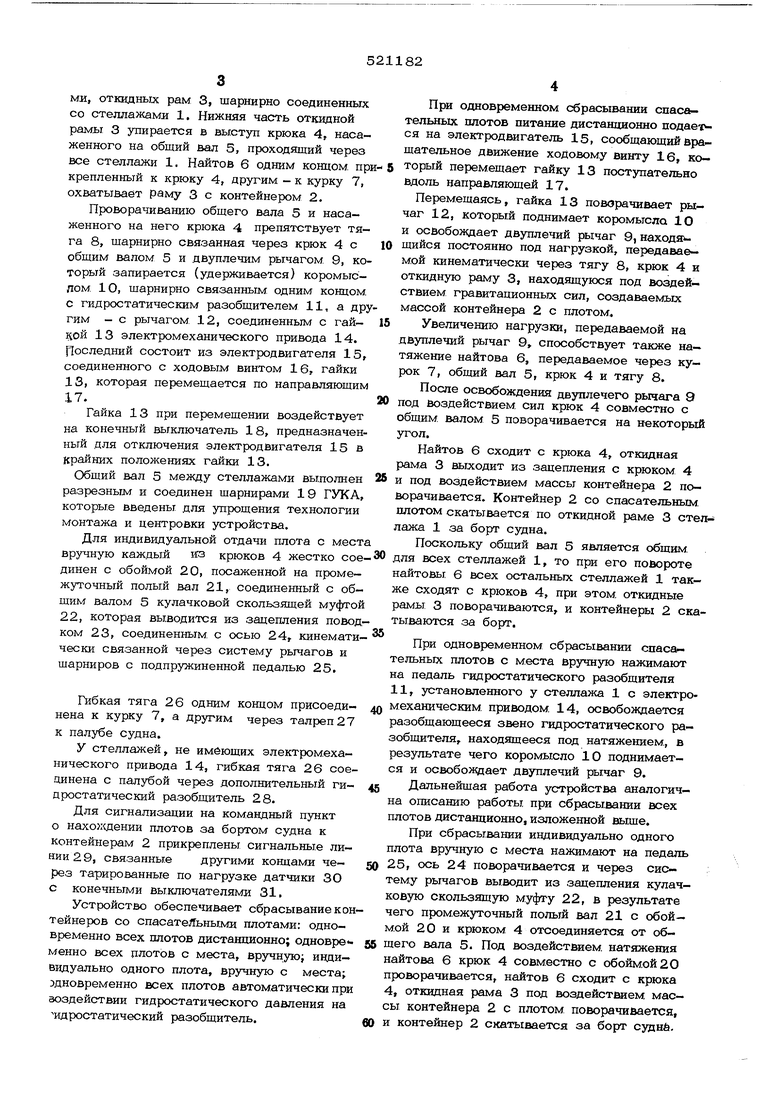
ми, откидных рам 3, шарнирно соединенных со стеллажами 1. Нижняя часть откидной рамы 3 упирается в выступ крюка 4, насаженного на общий вал 5, проходящий через все стеллажи 1. Найтов 6 одним концом, при крепленный к крюку 4, другим - к курку 7, охватывает раму 3 с контейнером 2.
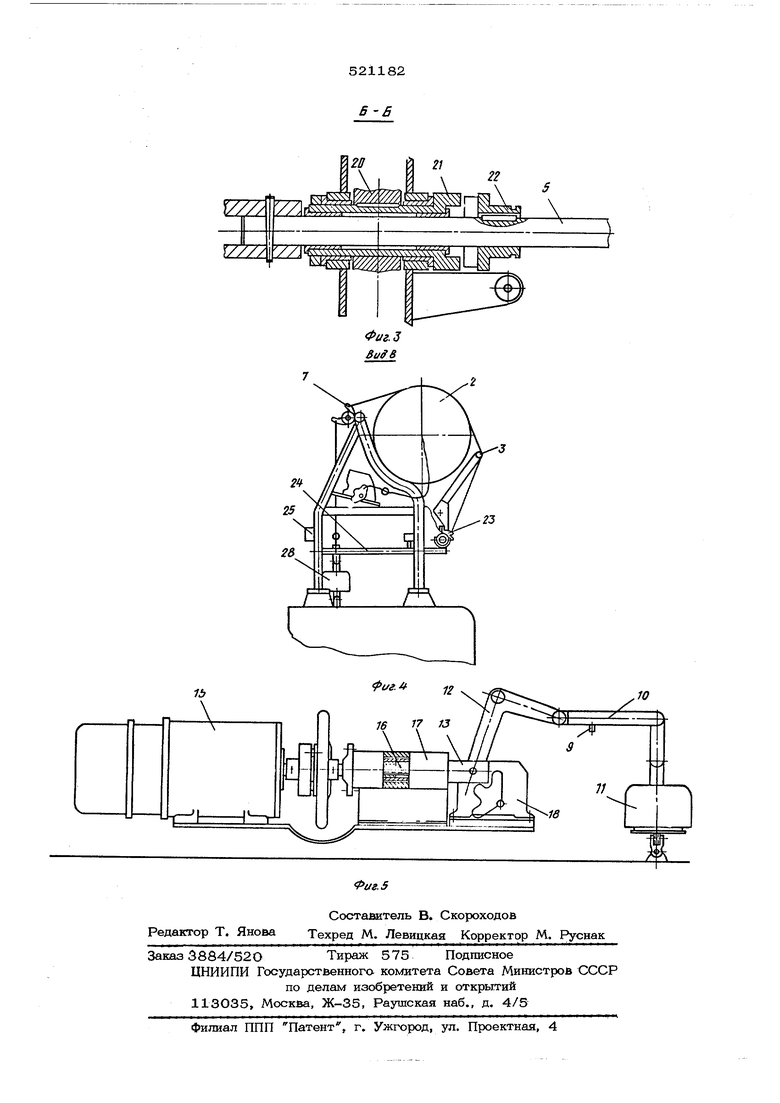
Проворачиванию общего вала 5 и насаженного на него крюка 4 препятствует тяга 8, шарнирно связанная через крюк 4с общим валом 5 и двуплечим рычагом 9, который запирается (удерживается) коромыслом, 1О, шарнирно связанным одним концом, с гидростатическим разобщителем 11, а другим - с рычагом 12, соединенным с гайк;ой 13 электромеханического привода 14. Последний состоит из электродвигателя 15, соединенного с ходовым винтом 1 б, гайки 13, которая перемещается по направляющим 17.
Гайка 13 при перемещении воздействует на конечный выключатель 18, предназначенный для отключения электродвигателя 15 в крайних положениях гайки 13.
Общий вал 5 между стеллажами выполнен разрезным и соединен шарнирами 19 ГУКА, которые введены для упрощения технологии монтажа и центровки устройства.
Для индивидуальной отдачи плота с мест вручную каждый из крюков 4 жестко сое динен с обоймой 20, посаженной на промежуточный ПОЛЫ.Й вал 21, соединенный с общим валом 5 кулачковой скользящей муфтой 22, которая выводится из зацепления поводком 23, соединенным с осью 24, кинемати- чески связанной через систему рычагов и щарниров с подпружиненной педалью 25.
Гибкая тяга 26 одним концом присоединена к курку 7, а другим через талреп 27 к палубе судна.
У стеллажей, не имеющих электромеханического привода 14, гибкая тяга 26 соединена с палубой через дополнительный гипростатический разобщитель 28.
Для сигнализации на командный пункт о нахогвдении плотов за бортом судна к контейнерам 2 прикреплены сигнальные линии 2 9, связанны.е другими концами через тарированные по нагрузке датчики ЗО с конечными выключателями 31,
Устройство обеспечивает сбрасывание контейнеров со спасатеЯьными плотами: одновременно всех плотов дистанционно; одновре-менно всех плотов с места, вручную ивди- видуально одного плота, вручную с места; одновременно всех плотов автоматически при воздействии гидростатического давления на гидростатический разобщитель.
При одновременном сбрасывании спасательных плотов питание дистанционно цодаег с я на электродвигатель 15, сообщающий вращательное движение ходовому винту 16, который перемещает гайку 13 поступательно вдоль направляющей 17.
Перемещаясь, гайка 13 поворачивает рычаг 12, который поднимает коромысла 10 и освобождает двуплечий рычаг 9, находя шийся постоянно под нагрузкой, передаваемой кинематически через тягу 8, крюк 4 и откидную раму 3, находящуюся под воздействием гравитационных сил, создаваемых массой контейнера 2 с плотом.
Увеличению нагрузки, передаваемой на двуплечий рычаг 9, способствует также натяжение найтова 6, передаваемое через курок 7, общий вал 5, крюк 4 и тягу 8.
После освобождения двуплечегчз рьгаага 9 под воздействием, сил крюк 4 совместно с общим, валом 5 поворачивается на некоторы угол.
Найтов 6 сходит с крюка 4, откидная рама 3 выходит из зацепления с крюком 4 и под воздействием массы контейнера 2 поворачивается. Контейнер 2 со спасательным плотом скатывается по откидной рам.е 3 стелажа 1 за борт судна.
Поскольку общий вал 5 является общим, для всех стеллажей 1, то при его повороте найтовы 6 всех остальных стеллажей 1 также сходят с крюков 4, при этом, откидные рамы 3 поворачиваются, и контейнеры 2 сктываются за борт.
При одновременном сбрасывании спасательных плотов с места вручную нажимают на педаль гидростатического разобщителя 11, установленного у стеллажа 1 с электромеханическим, приводом. 14, освобождается разобщающееся звено гидростатического разобщителя, находящееся под натяжением, в результате чего коромысло 10 поднимается и освобождает двуплечий рычаг 9.
Дальнейщая работа устройства аналогична описанию работы, при сбрасывании всех плотов дистанционно, изложенной выше.
При сбрасывании индивидуально одного плота вручную с места нажимают на педаль 25, ось 24 поворачивается и через систему рычагов выводит из зацепления кулачковую скользящую муфту 22, в результате чего промежуточный полый вал 21 с обоймой 20 и крюком 4 отсоединяется от общего вала 5. Под воздействием, натяжения найтова 6 крюк 4 совместно с обойм.ой20 проворачивается, найтов 6 сходит с крюка 4, откидная рама 3 под воздействием, массы контейнера 2 с плотом поворачивается, и контейнер 2 скатывается за борт суднб.
Формула изобретения
1,Устройство для сбрасывания спасательных плотов, содержащее наклонные стеЛ лажи, установленные на палубе судна, на которых контейнеры зафнксирозаны найто- выми крюками и гибкими тягами, причем найтовы кинематически связаны с приводом, имеющим дистанционное и ручное управление,
а также гидростатический разобщитель, отличающееся тем, что, с целью повышения надежности работы устройства, оно содержит систему рычагов с валом, проход$шщм. через все наклонные стеллажи и снабжено откидными ра1.}ами и курками, причем найтовы одним концом закреплены на крюках, а другим - на курках, при этом курки крайних стеллажей соединены гибкими тягами с гидростатическими разобщителями, а гибкая тяга среднего курка оборудована талрепом и соединена с палубой судна, причем привод кинематически связан с системо рычагов.
2,Устройство по П.1, отличающееся тем, что, с целью обеспечения надежного его срабатывания при различных климатических и температурных условиях, привод выполнен электромеханическим, и содержит электродвигатель, соединенный с винтом, на котором помещена гайка, установленная в направляющих и связанная через систему рычагов с валом и гидростатическим разобщителем.
3.Устройство по п. 1. о т л и ч аю щ е е с я тем, что, с целью избирателности при ручной отдаче крепления одного из группы плотов, вал выполнен из отдельных элементов, соединенных между собой муфтами.
4.Устройство по п. 1,отлича ющ е е с я тем., что, с целью обеспечения информацией командного пункта о срабаты.вании устройства и нахождении плотов за бортом, судна, к кодтейнерам закреплены сигнальные линии, причем на стеллажах установлены конечные выключатели, связанные с сигнальными линиями через тарированные датчики.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ СБРАСЫВАНИЯ НАДУВНОГО СПАСАТЕЛЬНОГО ПЛОТА | 1969 |
|
SU428983A1 |
| СТ . -..-L- . -vj-i ../on- ', f I | 1971 |
|
SU299405A1 |
| УСТРОЙСТВО для СБРАСЫВАНИЯ СПАСАТЕЛЬНОГО ПЛОТА | 1970 |
|
SU276761A1 |
| УСТРОЙСТВО ДЛЯ ХРАНЕНИЯ И СБРАСЫВАНИЯ СПАСАТЕЛЬНОГО ПЛОТА | 2002 |
|
RU2236982C2 |
| Устройство для крепления и спуска спасательных плотов | 1973 |
|
SU540768A1 |
| Судовое устройство для посадки людей в спасательные средства | 1984 |
|
SU1216916A1 |
| Устройство для хранения и сбрасывания надувных спасательных плотов | 2024 |
|
RU2829880C1 |
| Спасательное устройство | 1979 |
|
SU898704A1 |
| [ийТаИНО-ТЕХНИНЕСКАЯ | 1973 |
|
SU380528A1 |
| Судовое устройство для спуска спасательныхСРЕдСТВ | 1979 |
|
SU839839A1 |