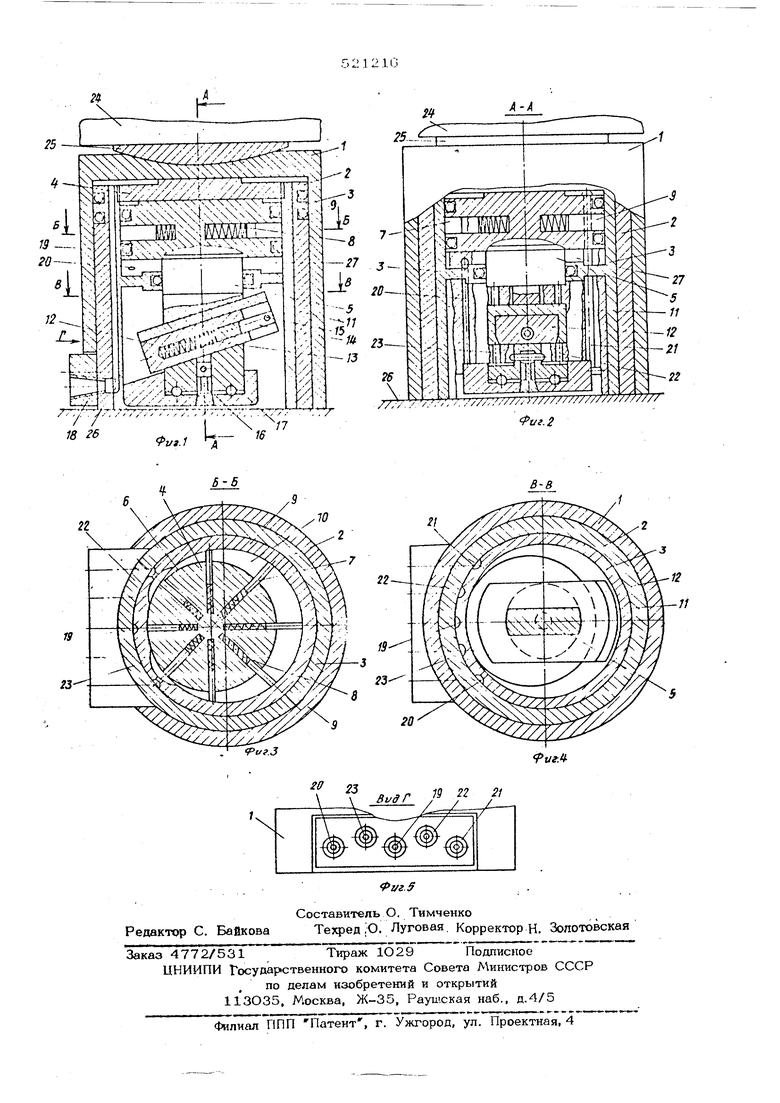
(54) ДОМКРАТ ДЛЯ ВЕРТИКАЛЬНОГО И Изобретение относится к области грузоподъемных устройств. Известны домкраты гидравлические для вертикального и горизонтального перемещений груза, содержащие корпус, гидросистему с трубопроводами-и гидроцилиндр вертикального перемеше1гая с поршнем, в полом щтоке которого смонтирован дополнительный поршень, связанный с поворотньтм kJniновым механизмом. Однако они не обеспечивают необходимой надежности при совместной работе нескольких домкратов, так как в них отсутствует механизм синхронизации. Цель изобретения - повышение надежности при совместной работе нескольких домкратов, а также обеспечение возможности дистанционного управления группой домкратов. Это достигается тем, что предлагаемый домкрат снабжен смонтироващп:.1М в полом штоке механизмом синхронизации, содержащем шарнирно связанную с подъемным клипом опорную пяту, фиксируемую относительГРАВЛИЧЕСКИЙ ЗОНТАЛЬНОГО ПЕРЕМЕЩЕНИЙ „ соры, а дополнительный поршень выполнен с эксцентрично расположенной цилиндрической шейкой с радиальными пазами, несушими подпружиненные лопасти, взаимодействующие с внутренней поверх12остью полого штока, кроме того, полый щток вьшолиен с продольными и полукольцевыкш окруж1&1ми канавками, а к наружной части полого щтока присоединена гребенка, связывающая рабочие полости гидродомкрата с трубопроводами гидросистемы, кроме того, полость под дополнительным поршнем соединена с гидросистемой. На фиг. 1 изображен гидравлический домкрат в разрезе; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1; на фиг. 4 - разрез В-В на фиг. 1; на фиг. Л - вид по стрелке Г на фиг. 1. Гидравлический домкрат для вертикального и горизонталыюго перемещения груза содержит корпус 1, внутри которого расположен полый поршень 2 с плотно присоедихепНым к HeMj коаксиальным полглм штоком , в котором расположен допол1ттелыгыП rio|iными кольцами поршня 4 на нем эксцентри но выполнена цилиндрическая, шейка G с ра диальными пазами 7. В пазы 7 встаилеш:, пружины 8 и лопасти 9, которые контактируют с внутренней поверхностью полого шт ка 3 и образуют полости 1О. К штоку 5 жестко присоединен клиновой механизм, включающий подвижный клин 11 котор1.:й перемещается по подъемному кли ну 12. В подвижном клине 11 смонт1фованы пружина 13 и толкатель 14, шарнирно присоединенный к подвижному клину J, 1 посредствомштифта 15. К горизонтальной опорной поверхности подъемного клина 12 посредствоъ торсионной рессоры 16 шарзшрно присоединена опорная пята 17. На наружной поверхности полого штока 3 выполнены продольные и полукольцевые окружные канавки, KOTOpi.ie перекрыты в продольном направлении внутренней поверхностью полого поршня 2, а по краям ограничены просверленными радиальными отверстиями; в верхней части полого штока 3, и в нижней части полого поршня 2 и в гребенке 18, образуются каналы, которые соединяют рабочие полости гидродом крата с гидронасосом { трубопроводы и гидронасос на чертеже не показаны ). Рабочая жидкость подается в полости гидро домкратаПО каналам 19 вертикального перемещения , 2О и 21 горизонтального перемешения, 22 и 23 углового перемещения клинового механизма. Груз 24 установлен насферическом баш маке 25, шарнирно связанном с корпусом 1 который опирается на основание 26. Под поршнем 4 выполнена полость 27. Гидравлический домкрат работает спе дующим образом. Подавая рабочую жидкость из маслопровода ( на чертежах не показаны ) по каналу 19 в рабочую полость над поршнем 2 (полым), поднимают груз 24 на тр буемую высоту. Выпуская рабочую жидкост из полости над полым поршнем 2 по кана лу 19 в. маслопровод, груз 24 опускают с корпусом 1. Горизонтальное перемещение ipyaa осуще . ствляется под действием рабочей жидкости, подаваемой одновременно в ряд гищзодомкра тов по каналу 2О в полость полового штока 3 над порщнем 4. При этом груз 24, сферический башмак 25, корпус 1 с полым штоком 3 пошшмаются вверх, а поршень 4 со штоком 5, клиньями Ij 12 и опорной пятой 17 опускаются В1шз до опирания на основание 26. Этим достигается перерас- продолокие верт 1кально напргтленной силы от действия массы груза 24 между опорш 1м:и поверхностями домкрата корпуса 1, полых поршня 2 и штока 3 и опорной пятой 17. Груз 24 через корпус 1, рабочую жидкость воздействует на поршень 4, шток 5, клиновой механизм с подвижным и подъекгаым клиньями 11 и 12. В клиновом механизме эта сила разлагается на две составляющие: вертикальную, которая действует на опорное основание 26 через опорные поверхности корпуса 1, полых поршня 2, штока 3 и опорную пяту 17; и горизонтальную, которая действует в направлении уклона наклонной плоскости сопряжения клиньев 11 и 12. Под действием горизонтальной составляющей груза 24 сферический башмак 25, корпус 1, полые поршень 2 и шток 3, поршень 4, подвижный клин 11 перемеш аются в горизонтальной плоскости в направлении уклона на расстояние, равное длине горизонтального хода толкателя 14, который сжимает пружину 13. При выпускании жидкости из полости полого штока 3 над поршнм 4 по каналу 2О и впускании последней по каналу 21 в полость 27 полого штока под поршнем 4 клинья 11 и 12, опорная пята 17 перемещают ся вверх. Одновременно подъекшьтй клин 12 под действием горизонтальной составляющей от собственного веса подъемного клина и усилия сжатой пружины 13 смещается по линии уклона. Затем цикл горизонтального перемещения начинается снова, как было изложено выше. При этом горизонтальная составляющая ох действия груза 24 преодолевает сопротавление сил трения между клиньями 11 и 12, а также между основанием 26 опорной поверхности и опорными поверхностями корпуса 1, полых поршня 2 и штока 3, Если груз 24 приподнят,, опорная поверхность корпуса 1 в работе сил трения участия не принимает. Синхронное изменение направления горизонтального перемеи1ения осуществляется действием рабочей жидкости на лопасти 9 и внутреннюю поверхность полого штока 3. Рабочая жидкость, подаваемая одновременно по каналам 22 и 23 в полость 1О ряда домкратов, действуя на внутреннюю поверхность штока 3 и лопасти У, затормажии лопасти . поршень 4 со штоком 5, подвижным и подъемным клиньями 11 и 12 опорную пяту 17 от самопроизвольных угловых перемещений, т.е. фиксирует клиновой механизм каждого из ряда домкратов в предварительно установлешгом направлении. Предварительное направление горизонтального перемещения ряда гидравлических домкратов производится поворотом поршня 4f подьижного и подъемного клиньев 11 и 12
И опорной пяты 17 вокруг вертикальной оси на требуемый угол путем выпускания рабочей жидкости из соответствующих полостей ряда домкратов по одному из каналов 22 или 23 в зависимости от направления врашекия. g
При этом в полостях 10 рабочая жидкость лерез лопасти 9 создает крутящий момент, зависящий от объема выпущенной жидкости, и проворачивает шток 5, подвижный и подъемный клинья 11 и 12, опорную пяту 17 на Q требуемый угол.
Вследствие образования погрешности при установке направления перемещения, т.е. обработки углов поворотаклиновых механизмов ряда гидродомкратов , в каждой 15 опорной пяте в начальный период горизонтального перемещения возникают моменты сопротивления относительно вертикальной оси от действия сил, вызванных этой погрешностью. Направление этих сил определяется 20 направлением горизонтальной.составляющей от массы груза 24, приходящейся на каждый из ряда домкрат и отклоняющихся от направления суммарной горизонтальной равнодействующей всех домкратов на угол,25 равный абсолютной погрешности установки. Величина и направление этой погрещности для ряда домкратов носят случайный характер.
Под действием суммарной горизонтальной равнодействующей ряда домкратов эти моминты сопротивления преодолеваются, домКратш поворачиваются в опорах: сферичёскчй башмак 25 - опорная пята 17, вокруг своей вертикальной оси, одновременно скручивая торсионную рессору 16 в пределах упругой деформации до тех пор, пока горизонтальная составляющая каждого домкрата из ряда не совпадает по направлению с суммарной равнодействующей. При возврате поршня 4 в исходное положение опорная пята 17 поднимается ,вверх, отрывается от опорного основания 26 и под действием сил упругой деформации торсионной рессоры 16 поворачивается на угол, равный абсолютной
погрет ностп, полученной при повороте клиноЕ ого механизма лопастями 9. Горкзонталь-ное перемеще:ние груза точно синхрониаировано по направлению действия равнодействующей от слагаемых горизонтальных составляющих, полученных путем разложение в каждом клиновом механизме ряда домкратов.
Формула изобретения
1, Домкрат гидравлический для вертикальI ного и горизонтального перемещений груза,со: держащий корпус, гидросистему с трубопрово1дами-и гидроцилиндр вертикального перемеще:ния с поршнем, в полом штоке которогосмонт. рован дополнительный поршень, связанный : с поворотным клиновым механизмом, о т личающийся тем, что, с целью повышения i надежности при совместной работе нес; кольких домкратов, а также обеспечения : возможности дистанционного управления группой домкратов, он снабжен смонтированным : в полом штоке механизмом синхронизации, содержащим шарнирно связанную с подъемпым клином опорную пяту, фиксируемую относительно последнего посредством торсионной рессоры, а дополнительный поршень выполнен с эксцентрично расположенной цилиндрической щейкой с радиальными пазами, несущими подпружиненные лопасти, взаимодействующие с внутренней поверхностью полого штока.
2.Домкрат по л. 1, отличающийся тем, что полый шток выполнен
с продольными и полукольцевыми окружными канавками, а к наружной части полого штока присоединена гребенка, связывающая рабочие полости гидродомкрата с трубопроводами гидросистемы; i
3.Домкрат по п. 1, о т л и ч а ю щи и с я тем, что полость под дополнительным поршнем соединена с гидросистемой.
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидравлический домкрат для вертикального и горизонтального перемещения груза | 1979 |
|
SU787350A1 |
| Устройство для подъема и перемещения груза | 1977 |
|
SU707887A1 |
| ЗАПОРНОЕ РАЗДВИЖНОЕ УСТРОЙСТВО | 2013 |
|
RU2632318C2 |
| Гидравлический домкрат | 1975 |
|
SU523862A1 |
| РАСШИРИТЕЛЬ | 2013 |
|
RU2538021C1 |
| УСТРОЙСТВО ДЛЯ ОБРАЗОВАНИЯ СКВАЖИН В ГРУНТЕ УДАРНЫМ СПОСОБОМ | 2012 |
|
RU2517267C1 |
| ГИДРОПУЛЬСАЦИОННЫЙ ПРЕСС | 1991 |
|
RU2010658C1 |
| Механизм перемещения вывешенного на домкратах агрегата | 1971 |
|
SU512162A1 |
| Подъемное устройство для прецизионной выверки и установки основания "горизонт" | 1976 |
|
SU673603A1 |
| БОКОВАЯ ОПОРА ДЛЯ ПОДЪЕМНО-ТРАНСПОРТНОЙ МАШИНЫ | 2016 |
|
RU2615843C1 |