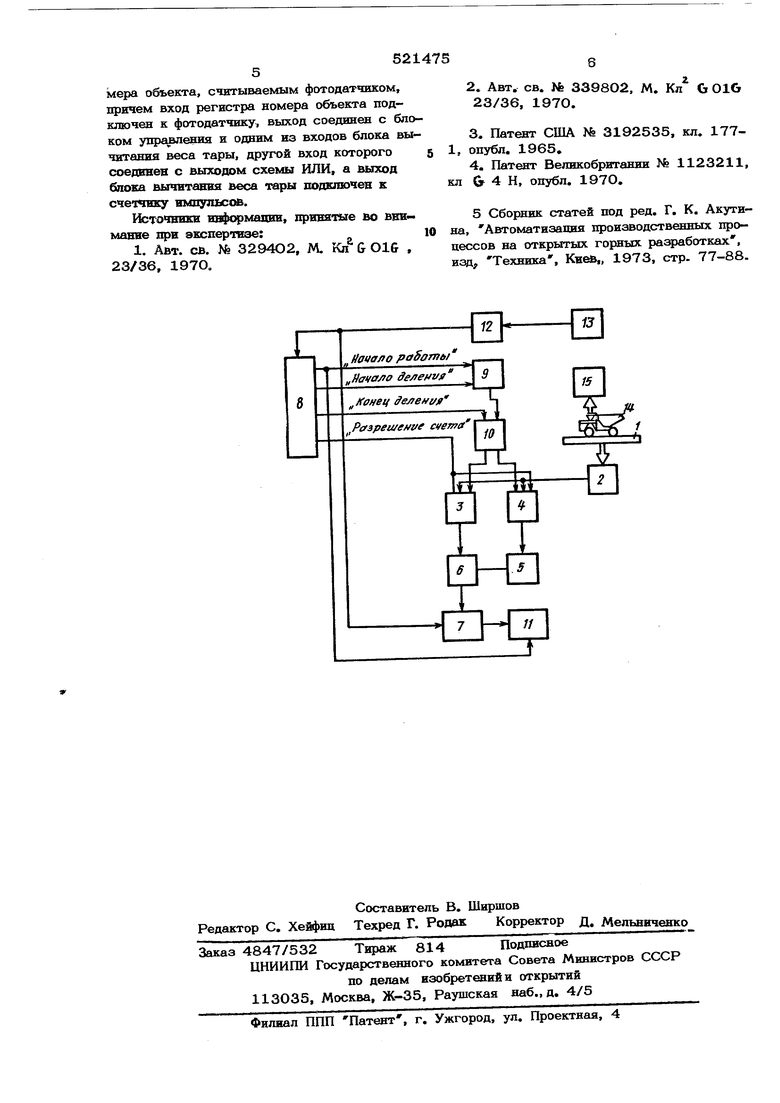
(54) УСТРОЙСТВО ДЛЯ ВЗВЕШИВАНИЯ ДВИЖУЩИХСЯ ОБЪЕКТОВ ный с блоком 7 и блоком управления 8; регистр 12 номера объекта, подключенный к фотодатчику 13 и блоку управления 8. Кроме того, каждый объект 14 оснащен трафаретом 15 кода номера, считываемым фотодатчиком 13. Устройство работает следующим образом Все подвижные объекты разделены на группы по грузоподъемности. Объектом первой группы (с наименьшей грузоподъемностью) присвоены порядковые номера с О1 по it ; второй - с п + + 1 по -т. и т. д. Таким образом, по номеру подвижного объекта определяют его грузоподъемность, вес тары и период динамической составляю щей нагрузки. При наезде подвижного объекта 14 на платформу 1 фотодатчик 13 считывает код номера с трафарета 15 кода номера и записывает его в регистр 12. По окончании считывания код номера подвижного объек- та передается из регистра 12 в блок ления 8, который формирует командные сигналъ Начало работы , Разрешение сче та , Начало деления и Конец деления , причем в зависимости от кода номера подвижного объекта и, следовательно, его грузоподъемности блок управления 8 формирует определенную длительность этих сигналов. Датчик веса 2 генерирует импульсы напряжения с частотой, пропорциональной весу объекта, которые поступают на схемы И 3, 4. Сигнал блока управления 8 Начало работы устанавливает счетчик импульсов 11 в исходное положение, а управляющий триггер 1О через схему ИЛИ 9 - в положение . При этом на схему И 3 подается запи рающий потенциал управляющего триггера О -а на схему И 4 - отпирающий. По сигналу блока управления 8 Разрешение счета открывается схема И 4, и импульсы датчика веса 2 проходят на счетный вход счетного триггера 5, с выхода которого с частотой, уменьшенной в два раза, через элемент ИЛ 6 они поступают в блок 7. По истечении времени Т , равного половине периода динат -..... мической составляющей нагрузки для объекта данной грузоподъемности, блок управлени 8 вырабатывает сигнал Конец деления , который устанавливает триггер управления 1О в положение О. При этом закрывается схема И 4, а схема И 3 открывается, и импульсы датчика веса 2 поступают через схему ИЛИ 6 в блок 7 без деления. За время Т ч ° окончания импульса Разрещение счета блок управления 8 вырабаты- ... вает сигнал Начало деления , который через схему ИЛИ 9 снова устанавливает триггер управления Ю в состояние , и сигналы датчиков веса 2 проходят через схему И 4 на счетный вход счетного триггера 5, По окончании сигнала Ра юшение счета схемы ИЛИ 3,4 закрываются, и взвешивание прекращается. Код номера подвижного объекта 14 из регистра 12 также передается в блок 7, выполненный в виде пересчетной схемы, где выбирает коэффициент пересчета, соответствующий весу тары данного объекта. Блок 7 исключает количество импульсов датчика веса 2, равное коэффициенту пересчета и, следовательно, весу тары объекта, а остальные пррпускает в счетчик импульсов 11. По окончании сигнала Разрешение счета счетчик импульсов 11 содержит информацию о чистом весе груза, транспортируемого подвижным объектом 14, а регистр номера подвижного объекта 12 - о номере этого объекта, Таким образом, предлагаемое устройство позволяет с более высокой точностью по сравнению с известным производить взвешивание движущихся объектов различной грузоподъемности, так как ввод регистра 12 и оснащение контролируемых объектов трафаретами 15 позволяет корректировать длительность сигналов блока управления 8 в соответствии с изменением периода динамической составляющей нагрузки. Кроме того, расишрены функциональные возможности устройства, так как введение блока вычитания веса тары позволяет без дополнительных операхшй получить в счетчике импульсов 11 чистый вес груза, транспортируемого объектом 14, а введение регистра номера объекта и оснащение движущихся объектов трафаретами кода номера позволяет вести селективный учет грузов, доставляемых различными подвижными объектами. Формула изобретения Устройство для взвешивания движущихся объектов, например автомобилей, содержа г-г шее грузогфиемную платформу, опирающуюся на частотный датчик веса, подключенный через схему И и счетный триггер к схеме ИЛИ, и блок управления, соединенный со счетчиком .импульсов, схемой ИЛИ, управляющим триггером и схемами И, отличающееся тем, что, с целию повышения точности и расширения диапазона ис пользования, оно снабжено блоком вычитания весатары и регистром номера объекта, а объекты снабжены трафаретами с кодом номера объекта, считываемым фотодатчиком, причем вход регистра номера объекта подключен к фотодатчику, выход соединен с блоком управления и одним из входов блока вычитания веса тары, другой вход которого соедвнев с выходом схемы ИЛИ, а выход блока вычитания веса тары подключен к счетчику вмпзгльсов.
lfcT-очввкн ивформадвси, принятые во внимание при экспертизе:
1. Авт. св. № 3294О2, М. Кд & О1& , 23/36, 1970.
V/36.797of ° - - °
3.Патент США № 3192535, кл. 1771, опубл. 1965,
4.Патент Великобритании № 1123211, кл 6 4 Н, опубл. 1970.
5 Сборник статей под ред. Г. К. Акутина, Автоматиаапия производственных процессов на открытых горных разработках , изд, Техника, Киев,, 1973, стр. 77-88.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устрой тво для взвешивания движущихся объектов | 1976 |
|
SU600398A1 |
| Микропроцессорная весоизмерительная система | 1981 |
|
SU1078255A1 |
| Устройство для распознавания и учета предметов по типоразмеру | 1987 |
|
SU1460731A1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ДЛИНЫ | 1998 |
|
RU2148789C1 |
| УСТРОЙСТВО для ВЗВЕШИВАНИЯ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 1972 |
|
SU356478A1 |
| Устройство для учета производительности добычных участков | 1980 |
|
SU862146A1 |
| Автоматическая микропроцессорная весоизмерительная система | 1987 |
|
SU1566226A1 |
| Устройство для взвешивания движущихся объектов | 1985 |
|
SU1288506A1 |
| Замкнутая телевизионная система для измерения объектов | 1987 |
|
SU1412004A1 |
| Способ взвешивания движущихся объектов | 1990 |
|
SU1732175A1 |
