. -3 НИИ режимов работы и блоком 16 вычитания веса тары, подключенным к блоку 7 управления, блоку 14 переключения режимов работы и счетчику 17 импульсов, соединенному с блоком управления. Работает устройство следующим образом. Для определения веса груза, перевозимого в подвижном объекте, проводится взвешивание груженого и пустого подвижного объекта и затем определяется разница этих весов. Все объекты разделены на группы по грузоподъемности. Объекту первой группы (с наименьшей грузоподъемностью) присвоены норядковые номера с 01 по п; второй- с п+ но т и т. д. Таким образом, по номеру подвижного объекта 13 можно определить его грузоподъемность и период динамической составляюш,ей нагрузки. Код номера подвижного объекта 13 зафиксирован на снециальном носителе 12 информации, выполненном, нанример, в виде решетчатой конструкции. Носитель 12 информации устанавливается на подвижном объекте 13 таким образом, чтобы он мог своими элементами модулировать световой ноток, попадающий на фотодатчик 11, и таким образом осуществлять его считывание. В зависимости от места расноложения устройства (нункт ногрузки или пункт разгрузкн) оно может работать в одном из двух режимов. Когда устройство находится в пункте погрузки, оно работает следующим образом. Нанравляясь на погрузку, пустой подвил ный объект 13 предварительно взвешивается. При его движении но платформе 1 фотодатчик И считывает код номера объекта 13 с носителя 12 информации, который записывается в регистр 10 номера объекта. Кроме того, в один из разрядов регистра номера объекта записывается признак направления.движения, формируемый фотодатчиком И и свидетельствующий о том, в каком направлении движется иодвижный объект 13 (к пункту погрузки нли от него). После окончания считывания код номера подвижного объекта и признак направления его движения передаются из регистра 10 номера объекта в блок 7 управления, который формирует командные сигналы «Начало работы, «Разрешенне счета, «Начало деления и «Конец делення. В зависимости от номера нодвнжного объекта и, следовательно, его грузонодъемности блок управления формирует определенную длительность этнх сигналов. Кроме того, нри движении объекта к нункту погрузки (направление движения определяется по состоянию разряда признака направления движения) блок 7 управления записывает в соответствующие разряды буферного регистра 15 номер этого объекта и устанавливает блок 14 переключения режимов работы в положение, нри котором выход схемы ИЛИ 6 подключается к последующим (за разрядами, в которые записан номер объекта) разрядам буферного регистра 15. В простейшем случае блок 14 переключения режимов работы может быть выполнен в виде двуХ входовых ключей. Датчик 2 веса генерирует имнульсы напряжения с частотой, пропорциональной весу объекта, которые постунают на схемы И 3, 4. Сигнал блока 7 управления «Начало работы устанавливает счетчик 17 нмиульсов в исходное положение, а управляющий триггер 9 через схему PIJIH 8 - в положение «1. При этом на схему И 3 нодается запирающий потенциал триггера 9 управления, а на схему И 4 - отпирающий. Но сигпалу блока управления «Разрешение счета открывается схема И 4 и импульсы датчика 2 веса проходят на счетный вход счетного трнггера 5, с выхода которого с частотой, уменьшенной в два раза, через элемент ИЛИ 6 и блок 14 переключения режимов работы оии иоступают в буферный регистр 15. По истечении времени Ть равного ноловине нернода динамической составляющей нагрузки для объекта данной грузоподъемности, блок 7 управления вырабатывает сигнал «Конец деления, который устанавливает тригrep 9 унравления в положепие «О. При этом закрывается схема И 4, а схема И 3 открывается и импульсы датчика 2 веса поступают через схему ИЛИ 6 и блок 14 переключения режимов работы в буферный регистр 15 без деления. За счет до окончания имнульса «Разрешение счета блок 7 унравления вырабатывает сигнал «Начало деления, который через схему ИЛИ 8 снова устанавливает триггер 9 унравления в состоянне «1, и сигналы датчика 2 веса нроходят через схему И 4 на счетный вход счетного триггера 5. По окончании сигнала «Разрешение счета схемы И 3, 4 закрываются, взвешивание прекращается. При этом в буферный регистр 15 записывается вес норожпего объекта н его номер. При движении груженого объекта 13 аналогичным образом в регистр 10 номера объекта записывается его номер, считанный фотодатчиком 11 с носнтеля 12 информации, и нрнзнак направления движения, которые переписываются затем в блок 7 управления. Последний подключает соответствующие разряды буферного регистра 15 с информацией о весе порожнего объекта к блоку 16 вычитання веса тары и устанавливает блок 14 переключения режимов работы в положение, нри котором выход схемы ИЛИ 6 подсоединяется к входу блока 16 вычитания веса тары. Блок вычитания веса тары выполнен, например, в виде двоичного счетчика и схемы совпадения. Далее блок 7 управления формирует командные сигналы «Начало работы, «Разрешение счета, «Начало деления и «Конец делення, длительность которых зависит от номера подвижного объекта и, следовательно, его грузоподъемности. Импульсы датчика 2 веса через схемы И 3, 4, счетный триггер 5, схему ИЛИ 6 и блок 14 переключения режимов работы поступают в блок 16 вычитания веса тары, где суммируются двоичным счетчиком. Пвеле суммирования количества импульсов, равного весу порожнего объекта, содержимое счетчика становится равным содержимому соответствующих разрядов буферного регистра 15, подключенных к блоку 16 вычитания веса тары.-При этом срабатывает схема совпадения блока вычитания веса тары и все последующие импульсы датчика 2, характеризующие чистый вес транспортируемого материала, проходят через блок 16 вычитания веса тары в счетчик 17 имнульсов. Таким образом, после взвещивапня груженого объекта в счетчике импульсов будет заппсан чистый вес транспортируемого им груза, а в регистре номера объекта - номер объекта.
Если устройство (грузоприемная нлатформа 1, частотный датчик 2 веса и фотодатчик 11; не может быть установлено в непосредственной близости к пункту погрузки, могут иметь место случаи, при которых в ожидании погрузки несколько порожних объектов находятся между грузоприемной платформой 1 устройства и пунктом погрузки. Прн этом возникает необходимость хранить вес и номера нескольких порожних объектов. Поэтому емкость буферного регистра выбирается таким образом, чтобы в него можно было заиисать информацию о максимально возможном количестве объектов, ожидающих погрузку (в больщиистве случаев это число составляет 3-5). После загрузки и взвещивания одного из этих объектов информация о нем исключается из буферного регистра и на ее место может быть записаиа новая.
Когда устройство расположено в пункте разгрузки, оно работает следующим образом.
Груженый самосвал, направляясь к пункту разгрузки, проходит предварительное взвешивание. Прн этом фотодатчиком И считывается код номера подвпжного объекта 13 с носителя 12 информации и записывается в регистр 10 номера объекта. В последний кроме того записывается признак направления движения, формируемый фотодатчиком 11. После окончания считывания код номера объекта н признак направления движения переписываются в блок 7 управления, который записывает код номера объекта в соответствуюпгие разряды буферного регистра 15. Кроме того, блок управлепня посредством блока 14 переключения режимов работы подключает выход схемы ИЛП 6 к последующим (за разрядами с 1;нформацней о номере объекта) разрядам буферного регистра 15. Затем блок управления формирует командные сигналы «Пачало работы, «Разрешение счета, «Начало деления, «Конец деления, н нмнульсы датчнка 2 веса через схемы И 3, 4, счетный триггер 5, схему ПЛИ 6 и блок 14 переключения режимов работы нроходят в буферный регистр 15. После окончания взвещивания в буферном регистре будет записана информация о иомере н нолном весе (весе груза и тары) одного или нескольких объектов.
При движении порожнего объекта считанный фотодатчиком 11 код его номера передается вместе с признаком направления движения в блок 7 управления, который подключает соответствующие разряды буферного регистра 15 с информацией о полном весе объекта к блоку 16 вычитания веса тары. Кроме того, блок управления носредством блока 14 переключения режимов работы подключает выход схемы ПЛП 6 к входу блока 16 вычитания веса тары и формирует командные сигналы «Пачало работы, «Разрещение счета, «Пачало деления и «Конец деления. Пмнульсы датчнка 2 веса через схемы П 3, 4, счетный триггер 5, схему ПЛП 6 и блок 14 нереключення режимов работы проходят в блок 16 вычитания веса тары, где суммируются двоичным счетчиком. После окончания взвещинання с блока 7 управления через схему ПЛИ 6 и 6vioK 14 переключения режимов работы в блок 16 вычитания веса тары проходят импульсы эталонной частоты, которые добавляются к весу тары объекта, записанному ранее в двоичном счетчике. Этн же нмпульсы проходят и в счетчик 17. После того, как содержимое двончпого счетчика блока вычитання веса тары станет равным содержимому соответствующих разрядов буферного регистра 15 (содержащих информацию о полном весе объекта), срабатывает схема совпадения
блока вычитання веса тары, н блок управления ирекращает формирование импульсов. При этом в счетчике 17 имнульсов записывается чистый вес груза, доставлеиного объектом, а в регистре номера объекта - номер
этого объекта.
Блок 7 управления выполнен в виде генератора эталонной частоты и расиределителя н rнyльcoв, представляющего собой, например, счетчик с дешифратором. Перевод устройства с одного режима работы на другой осуществляется изменением порядка следования управляющих сигпалов, например, посредством переключателя.
Таким образом, предлагаемое устройство
дает возможность с более высокой точностью, по сравнению с известным, нронзводнть взвещиванне движущихся объектов, так как блок 14 переключения реясимов работы и буферный регистр 15 позволяют осуществлять носледонательное взвешивание груженого н порожнего объекта н затем при определеннн чистого веса транспортируемого груза оперировать полученным действнтельным весом норожнего объекта, а не средним для данной грузоподъемности весом тары.
Формула изобретения
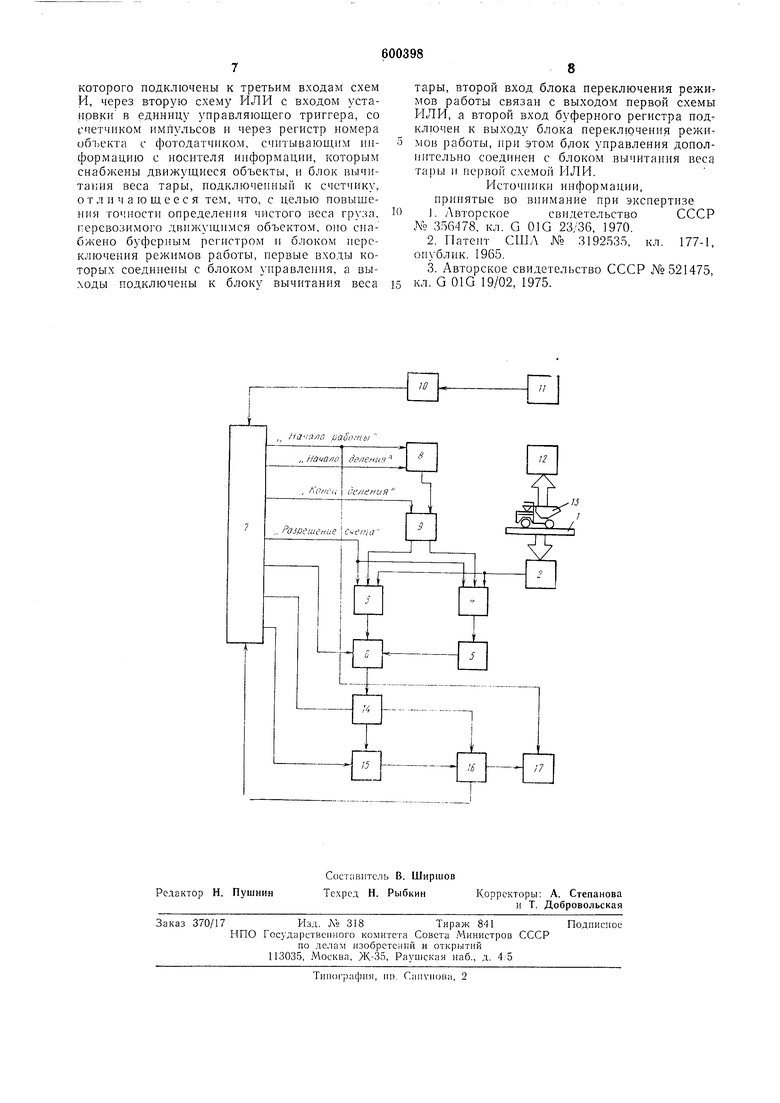
Устройство для взвещнвания движущихся обгектов, содержащее грузонриемную платформу, опирающуюся на частотный датчик веса, подключенный через две схемы П и счетный триггер к первой схеме ПЛП, блок управления, соединенный с вторымп входамн схем И, с входом устаповки в нуль унравляющего триггера, единичный н нулевой выходы
которого подключены к третьим входам схем И, через вторую схему ИЛИ с входом устанрвки в единицу управляющего триггера, со счетчиком импульсов и через регистр номера объекта с фотодатчиком, считывающим ииформацию с иосителя ипформации, которым снабжены движущиеся объекты, и блок вычитания веса тары, подключеиный к счетчику, отличающееся тем, что, с целью повышения точности определения чистого веса груза, перевозимого движущимся объектом, оно снабжено буферным регистром и блоком переключения режимов работы, первые входы которых соединены с блоком управления, а выходы подключены к блоку вычитания веса
тары, второй вход блока переключения режи мов работы связан с выходом первой схемы Р1ЛИ, а второй вход буферного регистра подключен к выходу блока переключения режимов работы, при этом блок управления дополнительно соединен с блоком вычитания веса тары и первой схемой ИЛИ.
Источники информации, ирииятые во виимание при экспертпзе
1.АвторскоесвидетельствоСССР № 356478, кл. G 01G 23/36, 1970.
2.Иатент СШ.Л № 3192533, кл. 177-1, ог1убл1 к. 1965.
3.Авторское свидетельство СССР №521475 кл. G 01G 19/02, 1975.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для взвешивания движущихся объектов | 1975 |
|
SU521475A1 |
| Система для управления экскаваторно-автомобильным комплексом | 1989 |
|
SU1647598A1 |
| Устройство весового контроля движущегося состава | 1979 |
|
SU879318A1 |
| Система автоматического пожаротушения | 1987 |
|
SU1461486A1 |
| Устройство для распознавания и учета предметов по типоразмеру | 1987 |
|
SU1460731A1 |
| Микропроцессорная весоизмерительная система | 1981 |
|
SU1078255A1 |
| УСТРОЙСТВО ДЛЯ СОПРЯЖЕНИЯ ЦВМ С КАНАЛОМ СВЯЗИ | 1991 |
|
RU2011217C1 |
| Устройство для передачи и приема информации о погрузочных и транспортных единицах | 1976 |
|
SU615520A1 |
| Устройство для автоматического переключения однофазных нагрузок в низковольтных распределительных сетях | 1981 |
|
SU1026234A1 |
| Устройство для определения локальных экстремумов функции | 1988 |
|
SU1508205A2 |
