нелинейный элемент и дифференциатор подключены. ко входу первого сумматора. Такое построение системы исключает колебательное движение объекта управления, вызванное возмущающим воздействием двигателя, и тем самым повышает точность работы системы.
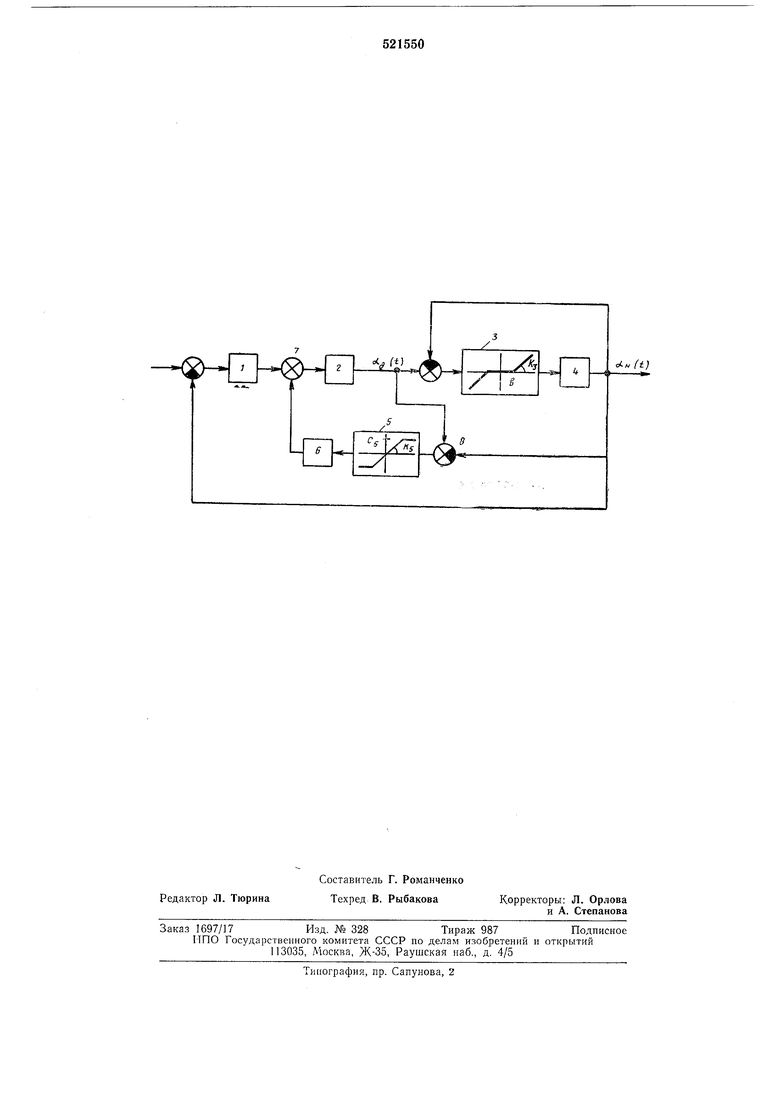
На чертеже представлена структурная схема предложенной скорректированной следящей системы с люфтом и приняты обозначения: 1 -регулятор; 2 - двигатель с датчиком угла; 3 - нелинейное звено типа «зона нечувствительности - модель люфта; 4 - механическая передача без люфта и объект управления с датчиком угла; 5 - нелинейное звено типа «насыще 6 - дифференциатор; 7 и 8 - первый н второй сумматоры; ссд/г/ и схи/// - углы поворота валов двигателя и нагрузки.
При расцеплении валов двигателя и объекта управления (вал нагрузки) вал двигателя попадает в зону люфта, при этом главная обратная связь отключается, и система оказывается разомкнутой и неуправляемой, что может привести к появлению автоколебаний. Поэтому, если в моменты расцепления валов двигателя и нагрузки на двигатель нодавать форсирующий сигнал, заставляющий его «прижиматься к валу нагрузки, то главная обратная связь не будет отключаться. Сигнал (ад - ап), поступающий на вход нелинейного корректирующего устройства, как раз и несет информацию о моменте расцепления валов двигателя н нагрузки.
Передаточная функция двигателя 2 приближенно может быть представлена в виде
7 5ТТТ
где 7д - электромеханическая постоянная времени двигателя, обусловленная моментом вращающихся частей на валу двигателя.
Параметры нелинейного корректирующего устройства (элементы 5 и 6) выбирают, исходя из условия
.()р(Т,р+),
Ki Кз 1) Cg и,
где We(P) -передаточная функция дифференциатора 6;
и - коэффициенты усиления линейных участков нелинейных характеристик звеньев 3 и 5;
Cs - величина насыщения нелинейного звена 5; 2Ь - величина зоны нечувствительности звена 3 (величина зоны люфта).
При этом поведение скорректированной нелинейной следящей системы с люфтом чолгюстью совпадает с поведением исходной линейной системы (без люфта), если
пренебречь неидеальностью дифференциатора 6.
Физический смысл разработанной линейной коррекции заключается во введении форсирующего воздействия на двигатель; как только появляется рассогласование между углами поворота валов двигателя и нагрузки, срабатывает нелинейное корректирующее устройство, на двигатель поступает форсирующее воздействие, и он выбирает зону люфта.
Передаточная функция реального дифференциатора имеет вид
SW (п} Р ДР
(1 + Гф,р)(1 + Гф.р)Время прохождения двигателем зоны люфта под действием корректирующего сигнала определяется постоянными времени Тф и Тф,, которые всегда можно выбрать достаточно малыми, чтобы ими пренебречь, по сравнению с протяженностью реальных процессов, происходящих в следящей системе. Тогда двигатель выбирает
5 зону люфта практически мгновенно, и динамические характеристики скорректированной следящей системы с люфтом определяются характеристиками исходной линейной системы (без люфта).
0 В процессе эксплуатации следящей системы люфт в механической передаче увеличивается, что приводит к ухудшению точностных характеристик. Предложенная следящая система с нелинейным корректирующим устройством позволяет повысить точность работы системы с люфтом и тем самым удлинить срок эксплуатации между профилактическими ремонтами механической передачи.
0.
Формула изобретения
Следящая система с люфтом, содержащая последовательно соединенные регулятор, первый сумматор, двигатель с датчиком угла, механическую передачу объект управления с датчиком угла, отличающаяся тем, что, с целью повышения точности системы, в нее введены второй сумматор, нелинейное звено типа «насыщение
Э и дифференциатор, причем выходы датчиков угла двигателя и объекта управления связаны со входами второго сумматора, выход которого через последовательно соединенные нелинейный элемент и дифференциатор подключены ко входу первого сумматора.
Источники информации, принятые во внимание при экспертизе
1.. св. № 318907, кл. G 05Ь 11/12 3 1970.
2.Нелинейные корректирующие устройства в системах автоматического управления. Под ред. Е. П. Попова и Ю. И. Топчеева. М., Машиностроение, 1971.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2114455C1 |
| Следящая система с люфтом | 1981 |
|
SU1012194A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2143719C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2154295C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2509328C2 |
| Следящая система | 1980 |
|
SU962841A1 |
| Следящая система | 1981 |
|
SU993202A1 |
| Способ компенсации люфта в механической передаче | 1974 |
|
SU531127A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2296355C2 |
| Следящая система | 1983 |
|
SU1109712A1 |