1 Изобретение относится к автоматичес кому регулированию и может быть испол зовано в следящих системах с люфтом в механической передаче, для которЬ1х автс 1обильный режим является недопуотимым. Известен следящий привод, содержащий последовательно соединенный элемент сравнения, блок определения знака усилитель-преобразователь, нагрузку, датчик положения нагрузки, выход которого подключен ко входу элемента сравнения, а также цепь из последовательно включенных корректора люфта, ключевог элемента, управляющий вход которого свдэан с выходом двигателя, сумматора и блока умножения, на выходе которого формируется сигнал, формирующий прохй дения люфта. Такое построение системы позволяет осуществлять компенсацию люфта при медленно меняющихся входных воздействиях Е1J. Однако такая система имеет ряд су-. щественнь1х недостатков. Во-первых, сигнал, форсирующий прохождение люфта, вырабатывается в течение постоянного времени. А для устройств с переменным моментом инерции (например работы-манипуляторы, крановые механизмы, штабелеры и т.п.) это время должно быть величиной изменяющейся. Во вторых, корректиру Ьщий сигнал для отработки люфта имеет релейную характеристику. Поэтому при отработке люфта возникают автоколебания в системе. Все это приводит к низкой точности указанной системы. Известна также следящая система с нелинейной коррекцией, содержащая регулятор, двигатель,, охваченный жесткой об ратной связью, редуктор с нелинейностью типа люфта, и объект, а, также модель двигателя и нелинейную корректирующую цепь, состоящую из последовательно включенных дифференциатора и релейного элемента, на вход которого поступает сигнал ошибки системы, а выход соединен со входом двигателя 2 . При таком построении системы выходной сигнал нелинейной корректирующей цепи достаточно быстро перемещает вал двигателя в зоне люфта. Однако релейная характеристика этого сигнала приводит к неконтролируемым движениям вала двига геля внутри эотл люфта. При этом вал двигателя, обладая определенной энерГЕей, осуществляет силовые момевт|9 1е 642 воздействия на вал объекта управления, что приводит к автоколебащюм в системе и снижает точность работы. Кроме того, данная следящая система позволяет осуществлять компенсацию люфта лишь , для медленно меняющихся входных воэдёйствий. При быстрых изменениях входгного сигнала во время отработки люфта сигнал задания, складываясь с коррект рующим сигналом, может достичь значительной величины, что приводит к увеличению динамических нагрузок и снижает точность системы. Наиболее близкой к изобретению по . технической сущности и достигаемому эффекту является следящая система с люфтом, содержащая последовательно соединенные блок сравнения, регулятор скорости, первый сумматор, двигатель с датчиком угла, объект управления с датчиком угла, а также второй сумматор, на выходе которого формируется сигнал рассогласования между углами поворота валов -двт ателя и объекта управления, который подается на вход нелинейного корректирующего звена, состоящего из последовательно соединенных нелинейного элемента типа Насыщение и дифференциатора, причем выход этого звена соединен со входом датчика угла двигате- ля . Недостатком является то, что процесс компенсации люфта в конце отработки затягивается, ибо коэффициент усиления нелинейного элемента типа Насыщение остается неизменным, что отрицательно влияет на точность работы системы. Кроме того, при увеличении скорости изм&нения входного сигнала сигнал задания в совокупности с корректирующим сирна.т(Ы может дост.ичь недопустимо большой величиш 1, что приводит к увеличению динамических нагрузок и снижению точности системы. Цель изобретения - повышение точности следящей системы преимущественно при быстро меняющихся входных возде2Ьствиях. Поставленная цель достигается тем, что в следящую систему с люфтом, содержащую блок сравнения,первый вход которого является входом системы, первый в второй сумматоры, регулятор скорости, авкг&гелъ с датчиком угла, соединенный с объектом управления с датчиксяд угла, дифференциатор и нелинейный элемент типа Насыщение, при этом выходдатчика угла объекта управлеяня со&динен с вторым входом блока сравнения
и с первым входом второго сумматора, второй вход которого связан с выходом датчшса угла двигателя, а выход второго сумматора подкточен к первому входупервого нелинейного элемента типа На- сыщение, дополнительно введены второй нелинейный элемент типа Насыщение, усилитель-инвертор и третий сумматор. При этом выход второго сумматора через последовательно соединенные дифферешш атор и усилитель-инвертор cBssaH с Вторым входом второго иепинвй1юго элеме та типа Насыщение , первый вход которого подключен к выходу блока сравнения, а выход соединен с первым входс 4 первого сумматора, выход которого через регутштор скорости соединен с входом двигателя, причем выход дифференциатора подключен к второму входу первого нелинейного элемента типа Насыщение и к первому входу третьего сумматора, второй вход которого связан с выходом первого нелинейного элемента, а выход подключен к вторсму входу первогю сумматора.
Такое построение системы позволяет получить форсирующий сигнал, имеющий не только пропорциональную скорости изменения люфта составляющую, создаваемую с помощью дифференциатора, аи составляющую, пропорциональную величине люфта. Это составляющая сигнала форм1 руется при подключении второго .управляющего входа первого нелинейного элемента типа Насыщение. Обе упомянутые составляющие суммируются на в&еденн(я«( третьем сумматоре, а затем через первый сумматор и регулятор скорости поступают на форсируя отработку та. Введение в систему второго непинейвого элемента типа Насыщение, второй управляющий вход которо1х соединен с выходом дифференциатора через усилитета инвертор, позЁопяет обеспечить ограничение сигнала ошибки, являющегося резупь тат(4 сравнения сигнала задания и сиг нала обратной связи. При быстро изменяющихся входных воздействиях сигнал ошибки может достичь большой вепичивы и вместе с форсирующим сигналом может приве лИ к насыщению регулятора скороо ти.
В начальный момент отработки люфта уровень ограничения сигнала ошибки увеличивается, а к концу отработки умеш щается, исключая тем самым насыщеиие регулятора скорости, а следовательно уменьшая динамические нагрузки в механооборудовании, исключая автоколебания и повышая точность системы.
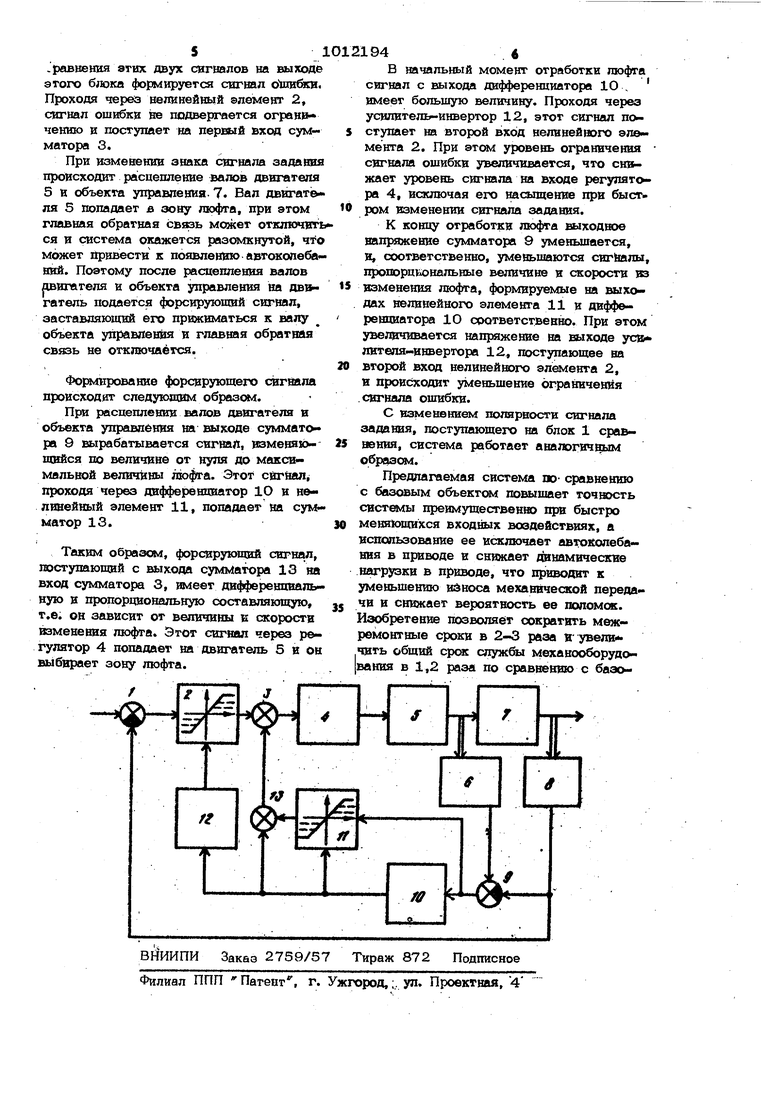
На чертеже изображена структурная схема следящей системы с люфтом.
Система содержит блок 1 сравнения, первый вход которого является входом системы, а выход соединен с первым входсм второго нелинейного элемента 2 типа Насыщение Выход элемента 2 поА-. ключей к первому входу первого суммам тора 3, выход которого чер регулятор 4 скорости связан с входом двигателя ;5 -с датчиком угла 6. Выходной вал двигателя 5 механически связан с входным валом объекта управления 7 с дат-: чиком угла 8. Выход датчика угла 8 объекта управления 7 подключен к второму входу блока 1 сравнения, а.также к первсжлу входу второго сумматора 9, . выход которого связан с входом дифференциатора 10 и первым входом первого нелинейного элемента 11 типа Насыщение. Выход дифференциатора 1О соединен с вторым входом нелинейного элеме1рн та 11, входом усилителя-инвертора 12 и первым входом третьего сумматора 13, второй ESioa которого связан с выходом Первого нелинейного элемента 11. Выход I третьего сумматора 13 соединен со вторым входом первого сумматора.3, а вы,ход усилителя-инвертора 12 подключен JXO второму входу второго нелинейного «элемента 2 типа Насыщение.
Следящая система с люфтом работает следующим образом.
Сигнал эадаюш через последовательно соединеннь1е блок 1 сравнения, нелинейный элемент 2, сукшатор. 3 и регулятор 4 скорости поступает на двюпатепь 5. На выходах датчиков угла 6 и 8 двигателя 5 и объекта управления 7 происходит и: енение во времени сигналов, соответствующих углам поворота валов . двигателя и объекта управления. При этом люфт объекта управления 7 выбрав и на выходе сумматора 8 сигнал отсут ствует. На выходах дифференциатора 1О и нелинейного элемента 11 сигвалы так же отсутствуют, поэтому форсируктвй сигнал на выходе сумматора 13 равен вулю. При нулевом сигнале иа входе усЕлитепя-вввертЬра 12 его выходвой сигнал, поступаюпохй ва второй ynpaBiisi юший вход нелинейвого элемевта 2, будет максимальным. Выходвой сигнал с объевта управления 7 поступает ва второй вхо блока. 1 сраввения, заьшкая лаввую об; ратную связь. На первый вход блока 1. подается сигнал заданва, и в результате
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2143719C1 |
| Следящая система с люфом | 1974 |
|
SU521550A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2114455C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2154295C1 |
| СЛЕДЯЩАЯ ЛОКАЦИОННО-ОПТИЧЕСКАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2006 |
|
RU2325671C1 |
| Следящая система | 1983 |
|
SU1123019A1 |
| Следящая система | 1981 |
|
SU993202A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2509328C2 |
| Следящий привод | 2019 |
|
RU2723331C1 |
| Комбинированная следящая система | 1982 |
|
SU1023276A1 |
СЛЕДЯШАЯ СИСТЕМА С. ЛЮ4ГГОМ, содержащая блок сравнения, первый ВХОД которого является входом системы, первый и второй сумматоры, регулятор скорости, двигатель с датчи ком угла, соединенный с объектом ущзвьления с датчиком угла, дифференциатор и первый, нелинейный элемент типа На- . сыщение, при эт,ом выход, датчика угла объекта управления соединен с вторым ВХОДОМ блока сравнения и с первым входом второго сумматора, второй вход которого связан с выходом датчика угла двигателя, а ВЫХОД второго сумматора подключен к перветлу входу первого нелинвй ного элемента типа Насыщение, о т - личающаяся тем,, что, с пелью повышения точности работы састемы преимущественно при быстро меняющихся ВХОДНЫХ воздействиях, В нее введены второй нелинейный элемент типа На- сыщение, усилитель-инвертор и трегвй сумматор, при этом выход второго сумг матора через последовательно соегас в ные дифференциатор и усилитель-внвер Ор связан с вторым ВХОДОМ второго веявн нейного элемента типа Насыщение, (Л пе1:гаый вход которого подключен к выходу блока сравнегая, а выход соединен с первым ВХОДОМ 1шрвого сумматора, выход которого через регулятор скорости совяянен с ВХОДОМ двигателя, щая&л выход дифференциатора подключен к ыюрому ВХОДУ первого нелинейаотч} элемента типа Насыщение и к первсму вкоду третьего сумматора, второй вход которого сввэав с Евыходом первого нвлинейюго элемевта ю а ВЫХОД подключен к второму входу перJBOro суммат ч«. QD 1
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| СЛЕДЯЩИЙ ПРИВОД | 0 |
|
SU392453A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Планшайба для точной расточки лекал и выработок | 1922 |
|
SU1976A1 |
