1
Изобретение относится к радиосвязи и может быть использовано в системах связи с двухчастотной модуляцией.
Известен цифровой частотный детектор, содержащий фазометр, управляемый симметричный фильтр, на который подан через интегрирующий усилитель сигнал с выхода, управлгоощую схему и ограничители 1 ,
Однако такой детектор обладает недостаточной стабильностью.
Известен также детектор, содержащий имимпульсный дискриминатор, на вход которого подан входной сигнал, блок выборки и хранения, управляемый сигналом дискриминатора, выпрямительную схему состоящую из операционных усилителей, пороговые устройства 2. Такой детектор не обеспечивает достаточного качества выходных сигналов и имеет сложную схему.
Кроме того, известен детектор, содержа- щий блок квантования входного сигнала, один вход которого соединен с источником входного сигнала, а второй вход с выходом генератора опорного сигнала, и логические счетные блоки. Особенностью этого частотного детектора является относительно высокое значение искажений при детектировании сигналов, в которых в пределах посылки имеются один-два периода несущей частоты 3 .
Целью изобретения является уменьщение искажений при детектировании сигнала с низкой частотой заполнения посылок.
Для этого в детектор введены блок вычисления конечной разности, регенератор и блок вычисления времени задержки, причем выход блока квантования входного сигнала соединен со входом блока вычисления конечной разности, один выход которого непосредственно, а второй - через блок вычисления времени задержки подключены к двум входам регенератора, третий вход котрого соединен с выходом генератора опорного сигнала.
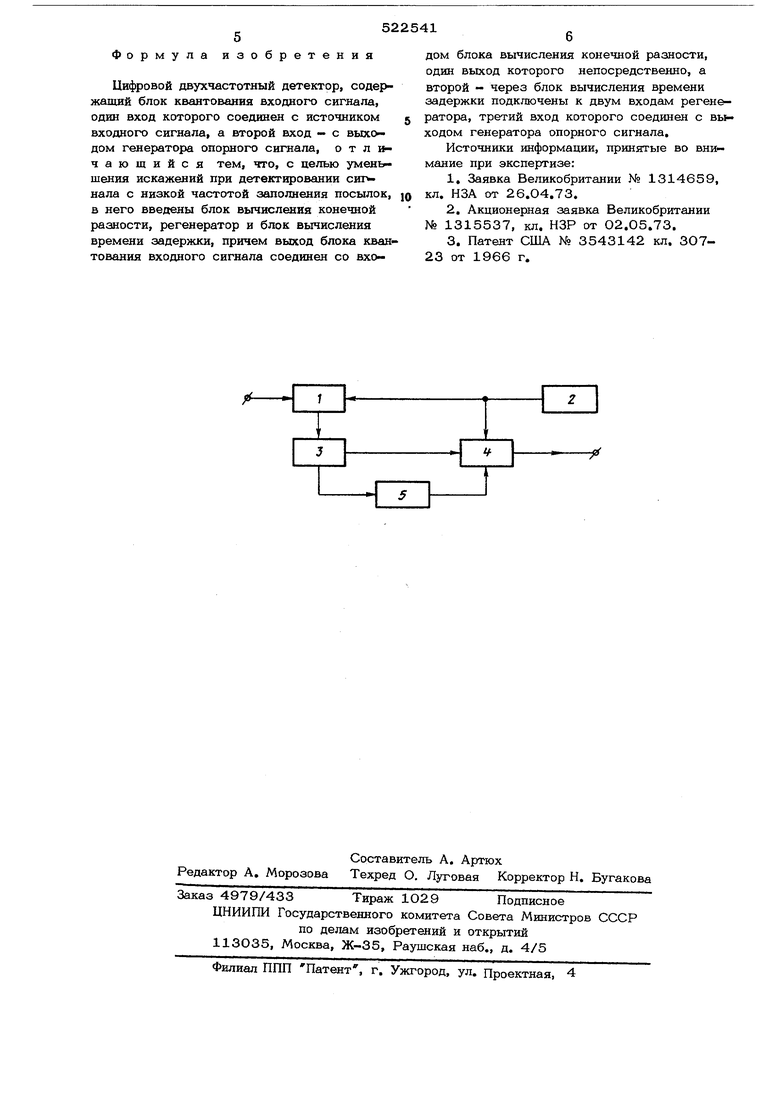
На чертеже приведена структурная электрическая схема предлагаемого детектора.
Детектор содержит блок 1 квантования сигнала, генератор 2 опорной частоты, бло 3 вычисления конечной разности, регенерат 4, блок 5 вычисления времени задержки. Источник входного сигнала на схеме не показан. Принцип работы детектора заключается в следующем, Пусть f. и f характеристические частоты ЧМ-сигнала, а - частота опорного генератора. Тогда период частоты f| будет соответствовать К импульсу опорного генератора, а период частоты f - К импульсам опорного генератора, где К и К - некоторые числовые величины. Если в пределах периода сигнала произошло изменение поля1 ности модулирующей посылки, т. е. в пределах периода содержится момент модуляции, число импульсов в периоде займет промежуточное значение между К . и К, и будет определяться смещением момента модуляции относительно начала (конца) периода сигнала. Поскольку число импульсов в периоде мо жет принимать только целочисленные значения в пределах от К и К,, число возможных значений различных периодов, содержа- щих моменты модуляции, может составлять величину д К К. - К 2. В свою очередь момент модуляции может принимать любое временное положение впре делах характеристической частоты, предшест вующей ему, т. е. может находится на любом из тактов от О до К, где К - значение числа импульсов в периоде, предшествующем моменту модуляции. Поскольку число возможных временных положений момента модуляции превышает число возможных значений периодов, любое из возможных значений принятого из канала связи периода сигнала отождествляется с положением момента модуляции в предела группы тактовых импульсов. Число тактовы импульсов в группе будет равно -п. для перехода , перехода от и f. По значению периода можно определить ту группу импульсов, в пределах которой находится момент модуляции. Поскольку чис ло импульсов в группе составляет величину 50 равную п, или п а длительность импул сов равна 1Гд--Амомент модуляции може быть определении соответственно восстанов лен с ошибкой, не превышающей величины: 8 1Гд-П для перехода от f, к fи ,Для перехода от f к f . Увеличивая частоту опорного генератора можно получить сколько угодно малое значение искажения посылки. Период сигнала, соответствующий переходу от f к fj, можно представить в виде: K, 12 1 2 а период сигнала, соответствующий переходу f в виде: OTf, к К, - Z, 5i 2 где величина 2 характеризует отклонение частоты сигнала от номинального значения, выраженное в тактах опорного генератора и лежит в пределах от О до Л К. Одновременно величина Z определяет смещение момента модуляции относительно начала периода, а величина Z. - относительно конца. Если число импульсов между нулями сиг нала записывать в некотором устройстве и каждый раз в момент нуль перехода вычислять конечную разность первого порядка между числом импульсов предыдущего и последующего периодов, то конечные разности для одинаковых периодов будут равны нулю. Конечная разность первого порядка не равна нулю для периодов, содержащих момент модуляции. Знак конечной разности характеризует полярность принимаемой информацион- посылки. Поскольку конечная разность вычисляется в моменты ноль-перехода, возникает ощибка восстановления момента модуляции. Величина, характеризующая значение ощибки, равна Za и может быть легко получена как конечная разность или из соотношения: AK Абсолютная величина ошибки, выраженная в числе тактов, соответственно равна одного перехода и . для другого. Процесс в описываемом детекторе проис- ходит следующим образом: в блоке квантования принимаемый из канала связи сигнал квантуется и представляется в виде цифровой последовательности указывающей число импульсов квантования в периоде. Полученная последовательность передается в блок вычисления конечной разности, с выхода которого знак конечной разности передается в регенератор 4, а абсолютная величина - в блок вычисления задержки, где производится определение величины задержки восстановленного момента модуляции, относительно конца периода. По известной задержке и известном знаке посылки регенератором 4 восстанавливается полярность и временное положение момента модуляции.
Формула изобретения
Цифровой двухчастотный детектор, содержащий блок квантования входного сигнала, один вход которого соединен с источником входного сигнала, а второй вход - с выходом генератора опорного сигнала, о т л №чающийся тем, что, с целью уменъ щения искажений при детектировании сиг, нала с низкой частотой заполнения посылок, в него введены блок вычислення конечной разности, регенератор и блок вычисления времени задержки, причем выход блока квантования входного сигнала соединен со входом блока вычисления конечной разности, один выход которого непосредственно, а второй - через блок вычисления времени задержки подключены к двум входам реген&ратора, третий вход которого соединен с вынходом генератора опорного сигнала.
Источники информации, принятые во внимание при экспертизе:
1.Заявка Великобритании № 1314659, кл. НЗА от 26.04.73.
2.Акционерная заявка Великобритании № 1315537, кл. НЗР от 02.05.73.
3.Патент США № 3543142 кл. ЗО723 от 1966 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система связи с относительной фазовой и фазоимпульсной модуляцией | 1987 |
|
SU1559421A1 |
| Цифровой синтезатор частот с частотной модуляцией | 1985 |
|
SU1293840A1 |
| Регенератор двоичных символов | 1978 |
|
SU723785A1 |
| Устройство для приема сигналов с относительной фазовой модуляцией | 1990 |
|
SU1714817A1 |
| Регенератор двоичных сигналов для радиоканалов | 1982 |
|
SU1085008A1 |
| Умножитель частоты | 1982 |
|
SU1095345A1 |
| Измерительное устройство для измерителя группового времени запаздывания | 1989 |
|
SU1620986A1 |
| ИЗМЕРИТЕЛЬ ФАЗ ОСЦИЛЛОГРАФИЧЕСКИЙ | 2005 |
|
RU2314543C2 |
| Устройство для приема сигналов с относительной фазовой модуляцией | 1989 |
|
SU1635278A1 |
| Цифровой фазовый детектор | 2018 |
|
RU2723445C2 |
