u-i, bi - параметры функции преобразования
устройства;
т - число линейных отрезков, с помощью которых может быть описана в общем случае нелинейная функция преобразования устройства.
Величина параметров а bi зависит от измеряемой массы Р в силу нелинейности функции преобразования устройства, а кроме того, от изменения внешних условий и от временного дрейфа характеристики отдельных элементов. При этом изменение параметров а,, bi обусловливает погрешность измерения.
Влияние параметров ui, bi на точность измерения массы устранено в описываемом устройстве за счет одновременного проведения с помощью основного и двух дополнительных массоизмерительных преобразователей трех преобразований, позволяющих получить информацию о текущих значениях параметров ai, bi и исключить их влияние на результат измерения ма-ссы.
Работает устройство следующим образом.
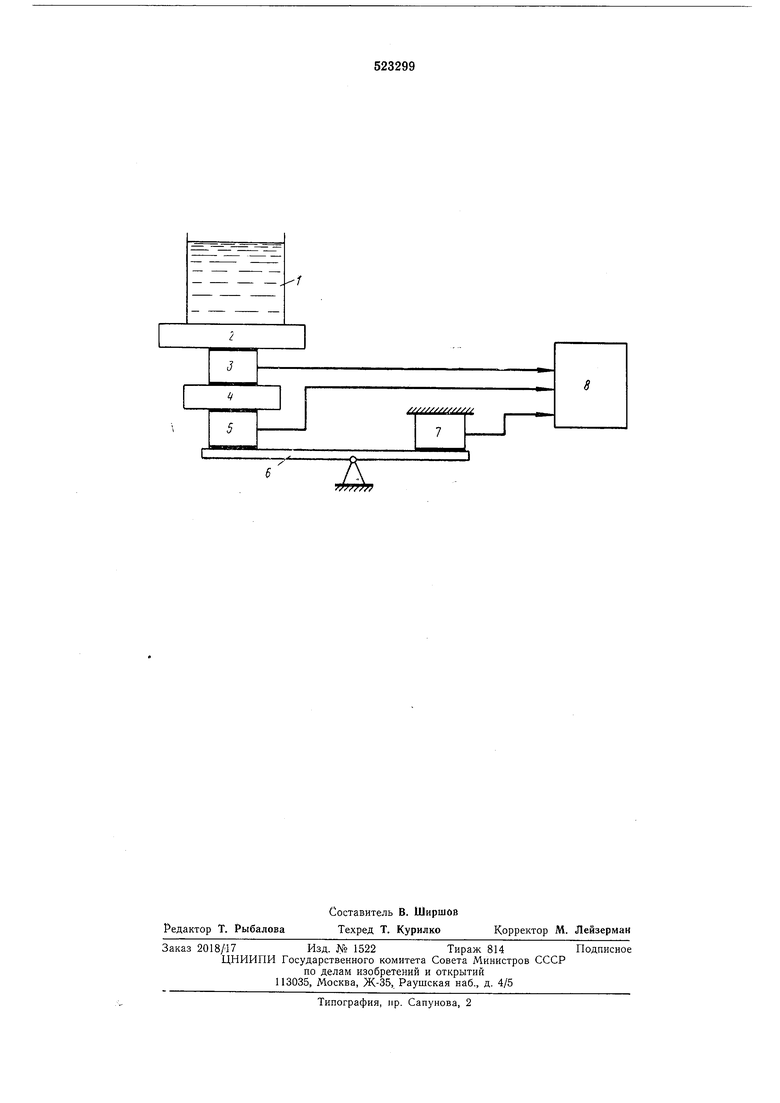
Основной массоизмерительный преобразователь 3 воспринимает усилие, пропорциональное измеряемой массе Р объекта 1. Дополнительный преобразователь 5 воспринимает усилие, пропорциональное сумме массы измеряемого объекта и груза 4 известной величины. Дополнительный преобразователь 7 воспринимает усилие, пропорциональное К(Р-{-Ро), где К - коэффициент передачи рычага 6. Измерительный блок 8 регистрирует результаты yi, yz, уз преобразований, осуществляемых одновременно тремя преобразователями - ООНОИНЫМ и двумя Д:ОООЛНИТ1еЛЬНЫМ.И.
Полученные результаты г/ь г/2. Уз связаны с измеряемой массой Р соотношениями
у, aiP + bt,
y, a,(P + P,) + bt;
y (P + P,) + bi.
Эти выражения представляют собой систему трех уравнений с тремя неизвестными ui, bi, Р, из которой может быть вычислено любое из указанных неизвестных.
Таким образом в измерительном вычисляется измеряемая масса Р по
, Р
Р
-р..
У - У1 К
Как видно из этого выражения, результат измерения не зависит от параметров а,-, 6, функции преобразования устройства. Таким образом, исключается влияние на
точность измерения массы изменений этих коэффициентов, а следовательно и изменений внешних условий и временного дрейфа отдельных узлов и элементов устройства. Точность .измерения массы с пOJMoщью описываемого устройства определяется только стабильностью массы груза известной величины РО коэффициента передачи К. жесткого рычага идентичностью трех массоизме|рительных преобразователей.
При этом устройство ра:ботает в реальном масштабе времени, без потери быстродействия, что дает ему значительные преимущества перед известными устройствами с автокоррекцией.
Формула изобретения
Устройство для измерения массы, содержащее грузоприемную платформу, установленную на основной массоизмерительный преобразователь, выход которого подключен к измерительному блоку, и груз .известной величины, отличающееся тем, что, с целью повышения быстродействия, оно снабжено двумя дополнительными массоизмерительными преобразователями, идентичными основному, и соединенными между со-бой жестким рычагом, причем на один из дополнительных массоизмерительных преобразовател-ей последовательно установлены груз известной величины, основной массоизмерительный преобразователь и грузоприемная платформа, второй дополнительный массоизмерительный преобразователь
установлен на апору, а выходы дополнительных преобразователей подключены к измерительному блоку.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения массы | 1975 |
|
SU523300A1 |
| Устройство для измерения массы | 1978 |
|
SU685922A1 |
| Устройство для измерения массы | 1982 |
|
SU1076764A2 |
| Массоизмерительное устройство | 1983 |
|
SU1164554A1 |
| Способ измерения электрических и неэлектрических параметров | 1978 |
|
SU785769A1 |
| Автоматический весовой порционный дозатор с цифровым управлением | 1981 |
|
SU1000773A1 |
| ВЕСОВОЙ ПОРЦИОННЫЙ ДОЗАТОР | 1971 |
|
SU422971A1 |
| Способ измерения электрических и неэлектрических величин | 1985 |
|
SU1269038A1 |
| ТЕНЗОМЕТРИЧЕСКОЕ МАССОИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО ДЛЯ ВЗВЕШИВАНИЯ ГРУЗОВ (ВАРИАНТЫ) | 2009 |
|
RU2411463C2 |
| Крановое массоизмерительное устройство | 1983 |
|
SU1143987A1 |