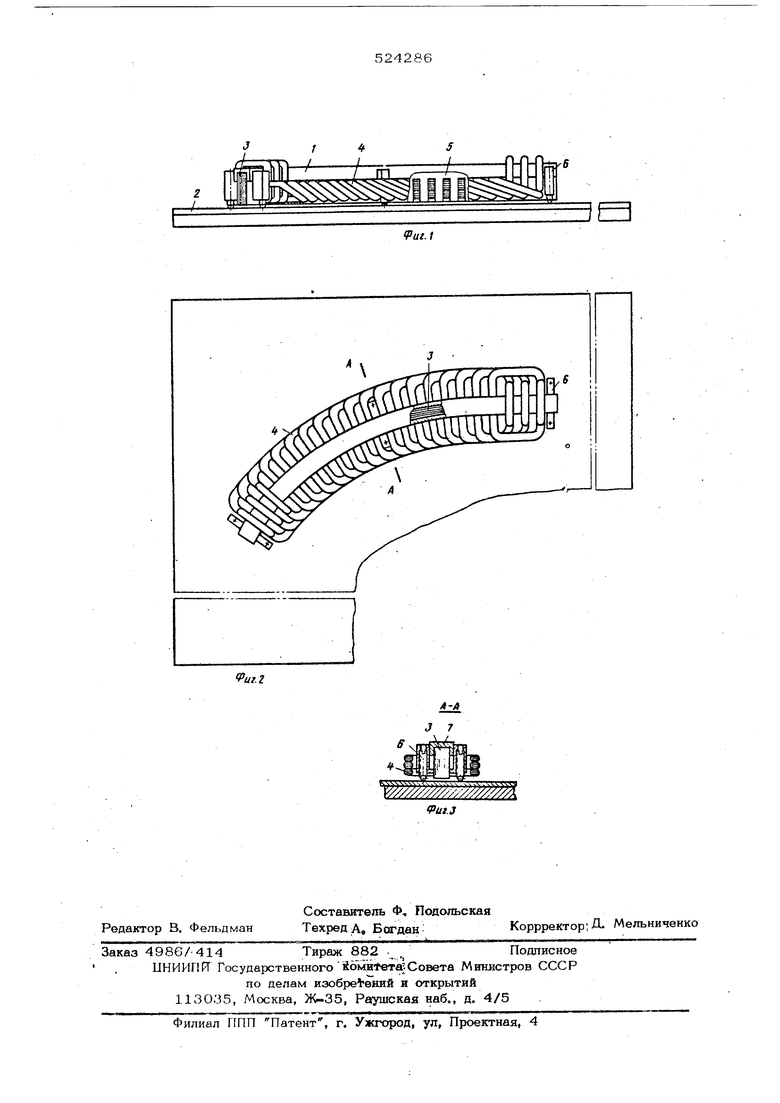
Изобретение относится к линейным асин- хронным двигателям и используется в качес тве безредукторного привода для механизированной шлифовки, зачистки, полировки электропроводящих поверхностей.: Известен,асинхронны и двигатель, содержащий электропроводящий якорь и индуктор с обмоткой, расположенной в пазах магнитопровода Ij. Магнитопрювод представляет собой дуь. гу окружности. Однако такой двигатель обеспеЦ чивает только вращательное движение рабочего органа относительно своей оси. Известен также линейный асинхронный двигатель, содержащий неподвижный электропроводящий якорь и подвижный индуктор с обмоткой, расположенной в пазах магнитопрювода, снабженного опорными элементами 2. Этот двигатель обеспечивает TontJ- ; ко возвратное-поступательное движение ин дуктора по траектории, ограниченной кон структивными элементами якоря, а именно: направляющими полками якоря, которые могут быть выполнены либо ггрямолинегйными, либо криволинейными. Данное устройство яЁ ляется наиболее близким к предложенному. Цель изобретения - обеспечение посту- s пательного и вращательного движения индуктора по поверхности якоря.| Для достижения этой цели магнитоп5эовод индуктора выполнен в плоскости движения ; криволинейным с монотонно изменяющимся : от одного конца к другому радиусом кривизны и представляет собо.й, например, дугу I архимедовой спирали. j На фиг. 1 показан предлагаемый двига.тель, вид сбоку; на фиг. 2 - тоже, вид с Jплане;;на фиг. 3 - сечение по А-А на фиг. 2, i Линейный асинхронный двигатель содер- жит подвижный индуктор 1 и неподвижный якорь 2 с гладкой электропроводящей верхностью. Индуктор 1 состоит из магнкт)о;провода 3, «набранного из листов электро: техни ческой стали, многофазной компенсирО ванной обмотки 4, уложенной в пазы 5 маг нитопровода 3, опор качения .6 ; профиль |ной накладки 7. Магнитопровод 3 индукто-; : ра выполнен в плоскости движения криво- j линейным с радиусом кривизны, исходящим ИЗ одной точки и возрастающим с одного ; конца магнитопровода к другому. Кривол нейность магиитопровода представляет собой часть спирали семейства монотонных; кривых, задавае шх в полярт-тх координатах, например, уравнениями, г о.Ч, CL С j и др., т. е. магнитопровод по своей кри- | визне может представлять, например, Дугу | архимедовой спирали, часть логарифмической спирали и т.п. Пазы 5 магнитопровода 3 расположен так, что продольные оси симметрии их пересекаются в центре радиуса кривизны магнитопровода 3, Обмотка 4 вы- ролнена многофазной, петлевой (однослойной или двухслойной), при этом компенсирующие стороны катушек расположетл в пазах на каждом конце индуктора, fla боковой поверх-ц ности магнитопровода закреплены опоры качения 6. Сверху магнитопровода по-всей его длине установлена профильная накладка 7. Якорь 2 представляет собой неподвижную электропроводящую плоскую или с большим радиусом кривизны шаровую поверхность, обращенную электропроводящим слоем в сторону- индуктора. Для повышения, к.п.д. двигателя якорь 2 может быть дополнен магнитным материалом, который следует располагать непосредственно под электропроводя- I щей поверхностью. В том случае, когда якорь представляет собой шаровую электропроводящую поверх-j ность, рабочая поверхность индуктора должна быть выполнена|С учетом геометрии этой поверхности, а именно: рабочая поверь;Хность индуКтора должна представлять собой геометрическое место точек, равно удавленных от центра :Геометричеокого места/ точек шаровой поверхности. При этом рас- ( стояние между рабочей поверхностью индукД тора и шаровой поверхностью равно величи не п6стоянноГч вОиЗдушного зазора, подбира4; емого с учетом получения оптимальных тя-; . говых усилий электродвигателя. Величину воздущного зазора между индуктором и яко| рем можно регулировать опорами качения, обеспечивающими свободное движение j индук|тора по электропроводящей поверхности ря и не допускающими магнитного прилипаниеиндуктора к якорю. При подключении обмотки 4 к сети перен, менного многофазного тока в индукторю 111 создается бегущее электромагнитное по пе, которое пересекает токопроводящую повЬрхнсжть якоря 2 и наводит в ней э.д.с;; которая вызывает появление токов Фуко. Токи Фуко, взаимодействуя с полем индуктора, создают электромагнитные силы. Благодаря тому, что индуктор выполнен криволинейным, ука-i СИЛЫ направлены по касательным к индуктору во всех его точках и перпендику- лярны пазовым линиям тока. В результате образуется пара неуравновешенных сил, ко«ц торая по отношению к пентру массы индук-Ч тора создает крутящий момент, а разность неуравновешенных сил создает силу, которая; обеспечивает поступательное перемещение центра массы. В итоге индуктор перемещается по электропроводящей поверхности якЫ- j ря так, что центр массы индуктора движет ся по прямой линии, а остальные точки йнДуктора совершают вращательное движение) ;относительно; линии движения центра массы; его. Если во время работы двигателя индуфтор на своем пути встречает препятствие, i то после столкновения с ним, возникающегч в результате взаимодействия боковой noBepU хности индуктора и препятствия, индуктор г ; выполняет поворот под действием пары не-; уравновешенных сил относительно центра и| изменяет направление движения. Таким образом, предлагаемый двигател1(, j позволяет обеспечить одновременно посту- j пательное и вращательное движение индук-} тора по поверхности , якоря. Формула изобретения Линейный асинхронный двигатель, содер - жащий неподвижный электропроводящий . и подвижный индуктор t обмоткой, расположенной в пазах магнитопровода;, снабженной i гоопорными элементами, отяичающ и и с я TeNt, что, с целью обеспеченна : ,поступательного1 и вращательного Движения индуктора по поверхности якоря, магнитоI провод индуктора выполнен в плоскости Жжения криволинейнь(м с монотонно изменя-i ющимся от одного конца к другому радиусом кривизны и представляет собой, , дугу архимедовой спирали. Источники информации, принятые во вни мание при экспертизе: 1. П, А, Фридкин Безредукторный Д5пгостаторный электропривод Энергия, ЛО 1970 г. 2, Патент Швейцарии № 51J6888, кл. Н02 к 41/02, 1972 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| Индуктор линейного электродвигателя | 1983 |
|
SU1130974A1 |
| Линейная асинхронная машина | 1980 |
|
SU978285A1 |
| Линейный асинхронных двигатель | 1976 |
|
SU618824A1 |
| Асинхронный электродвигатель возвратно- пОСТупАТЕльНОгО дВижЕНия | 1979 |
|
SU847458A1 |
| Линейный асинхронный двигатель | 1976 |
|
SU714587A1 |
| АСИНХРОННЫЙ ДВИГАТЕЛЬ С РАЗОМКНУТЫМ МАГНИТОПРОВОДОМ | 1992 |
|
RU2035826C1 |
| АСИНХРОННЫЙ ДВИГАТЕЛЬ С РАЗОМКНУТЫМ МАГНИТОПРОВОДОМ | 1992 |
|
RU2046523C1 |
| ЛИНЕЙНЫЙ АСИНХРОННЫЙ ДВИГАТЕЛЬ | 2010 |
|
RU2416864C1 |
| Устройство для вращения буровой колонны | 1982 |
|
SU1071737A1 |
| Ротор асинхронного электродвигателя,создающего вращательное и поступательное движение | 1981 |
|
SU995219A1 |
Y/////////////////////7, Риг.З
