(54) ПОЧВСОБРАБАТЫБЛЮЩЕЕ ОРУДИИ
| название | год | авторы | номер документа |
|---|---|---|---|
| Колесный сельскохозяйственный трактор | 1987 |
|
SU1419542A1 |
| Гидропривод механизма тракторной навески | 1979 |
|
SU857573A1 |
| СЕЛЬСКОХОЗЯЙСТВЕННЫЙ АГРЕГАТ | 1994 |
|
RU2091999C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ГЛУБИНЫ ОБРАБОТКИ ПОЧВЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2311011C1 |
| Способ автоматического управления навесным устройством на машинно-тракторном агрегате | 2024 |
|
RU2839475C1 |
| Электрогидравлический привод для управления навесными орудиями трактора | 1980 |
|
SU933014A1 |
| Гидропривод скрепера | 1985 |
|
SU1270241A1 |
| Стенд для исследования навесных гидравлических систем | 1979 |
|
SU781411A2 |
| Гидравлически-управляемая навеска сельскохозяйственных орудий на трактор | 1959 |
|
SU125954A1 |
| АГРОМАШИНА И СПОСОБ ЕЕ ИСПОЛЬЗОВАНИЯ | 2003 |
|
RU2264320C2 |
iO:ir; jTCHja относится к почзоо5)а5а тываюшим машииаМ) а именно к плугам, и может быть rip-iNioHeHo для одновременного автоматнчоского регулироваяип глубины iiaxoTbi и тягооог-л согротквления полунавес- ;-гого nJTyra при вспаШлЧе пояаолкстых. дераово-лоцзолистых и лесостепных почв.
Известно почвообрабаты-ваюшее орудие,
j.KijoaaHHji тягового гоаротиБле1;кя с чувствительным элементом, зоздействуюшим на гидравлический распределитель, связанный с гидроцилиндром заглублония рабочих органов.
Недостатком нзаестного гочвооб|1абатывающего орудия начнется Hononiioe выравн вание как тягового сопротивлония, так и глубины пахоты, так как тяговое сопрстнвлоние выравнивается изменением глубины хода рабочих оргаков, но полностью оно не БЫрааниваетсЕ Бследствие установки позициOHHOJXD регулятора.
Цель изобретение - регулирование тягового сопротивления при постоянной глубине основной обработки почзь;.
Достигается зто том. что з :ipo;viarac ;o i лочБОобрабатызаюше.м орудии органы снабжены 11;арнир;;о закрепленным :;п : араллелограм.1ных подвеск зх почзоуглубителем, который СБяза с гилроц;.1-:н;:|;-;х; заглублений, причем оруд);е снабл ено с;;стемой автоматического регулирования ;муби -:ы хода основнк.к рабочих органов.
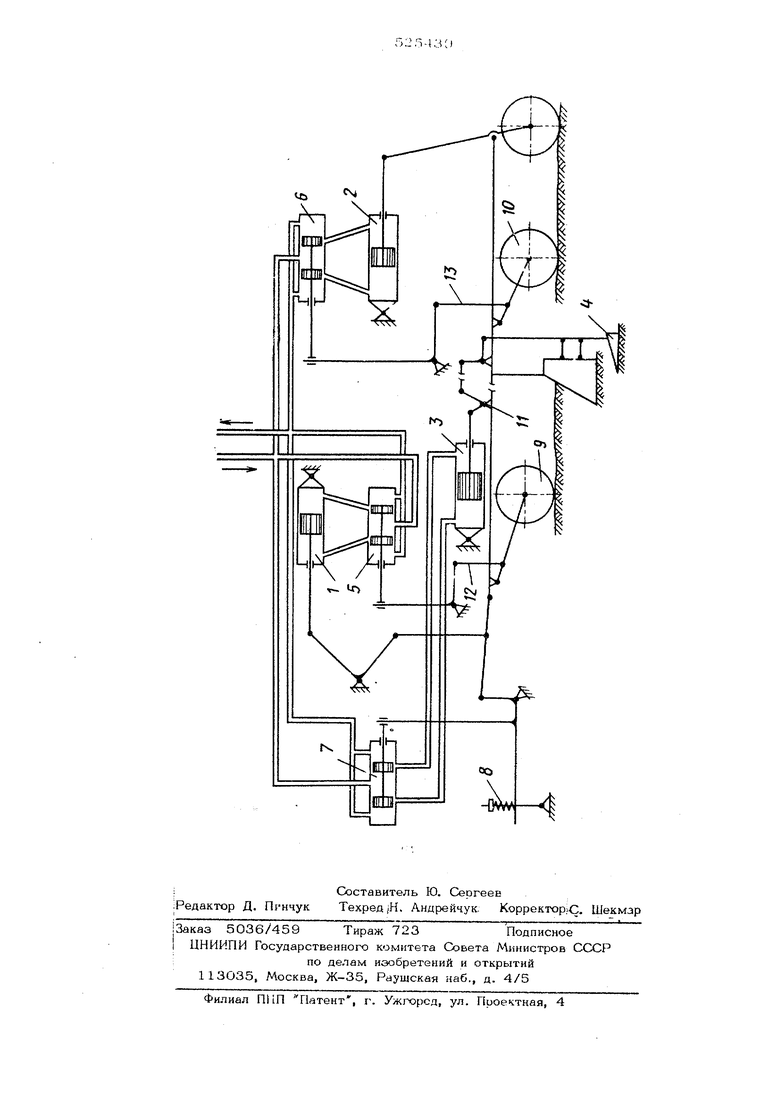
На чертел4е изображена лргп-цнпиаль: ;я
схема авт1эматического регулирова шя :;:iyr; лочвообрабатываюшего орудия с почвоуг-пубителями.
Почьоо5пабатмп;.1),дгО орудие включает .истеху актома.ическото ;О; ),
состоящую дзух силовых ;ч.дроцилинд13ов 1 i; 2j KOTOjjbii:- п ;д;П1 ;ают или опускают 11пму ;ючвообрабать Баюа1О1 о оруд;1я в за;1симости от глуб1 ;ы зспашки, силового ци.лиидра 3, ..)ди1 Ли1ЮШсГО .
о ускают ;чо ;:очвоу1-пуб:.)тсл1 4 Б завмси.чюсти от помгН. тягового со:,ротиа1.Г11 V почвооб})пбать;вак111и1 рулия, гидро; асирод1м:1Т(Л 1 5, li, 7, чувствителыи го Я.ТОМОИТа ( п:П-;п1;м;-1 S, l;O;l,.lK);niT
сигнал 3 jj-)v B-jro со1 ротиш е)ия, ftoimpysoiUHx колос ( J) и J.QS кото|)ые чорез ртлчажный мехациакс; дают сигиал к ги/хрораспрелелителям 5 и (3 при изменении гпубяпы вспашки. П.оЧЕОобра6агь вающее орудие устанаыш- ; вают на заданную глубину вспашки положе- нием копирующих; колес относительно oriop-j ной плоскости корпусов изменением длины вертикш ьных тяг 12 и 13, а,глубину хода почвозамтубнтелой устанавливают перемещением ciX)eK лап относительно корпуса орудия
Т-йбога почйообрабатьшаюгцего орудия существляется следующим образом,
При установившемся режиме работы ору :j5 ня золотники гидрораспределителей находятся в нейтральном положении. При увеличении тяговогО сопротивления чувствительный элемент сжимается, перемешая золотник гидрораспределителя 7 EnpasOs тогда рабо- 20 чая жидкость будет подаваться в правую погюсть гилрощшиндра 3. Шток гидроцилиндра 3j здвиг:аясь , в цилиндр,- повернет вал llf который через тяги и двуплечие ; рычагн заглубляет 1лубокорыхли:гельные лапы. 25 Подъем лап будет происходить до тех пор, пока тяговое сопротивление не уменьшится до оптимального. При этом прунсина 8, разжимаясь, -дернет золотник в нейтральное положе гие. При уменьшении типового сопро- 30 тивления происходит обратное действие. При звеличаняи глубины вспашки копирующие
Формула и а, обретения
